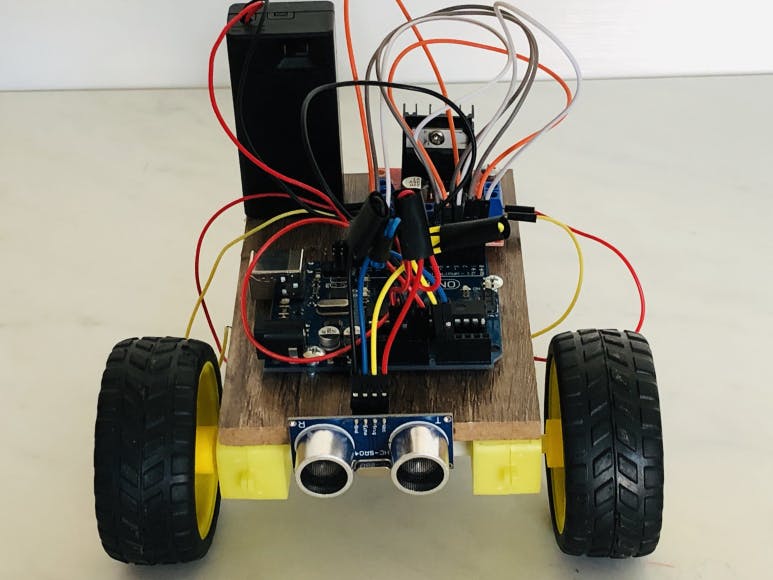
In this tutorial we will learn how to build a self driving car that avoid any obstacles.
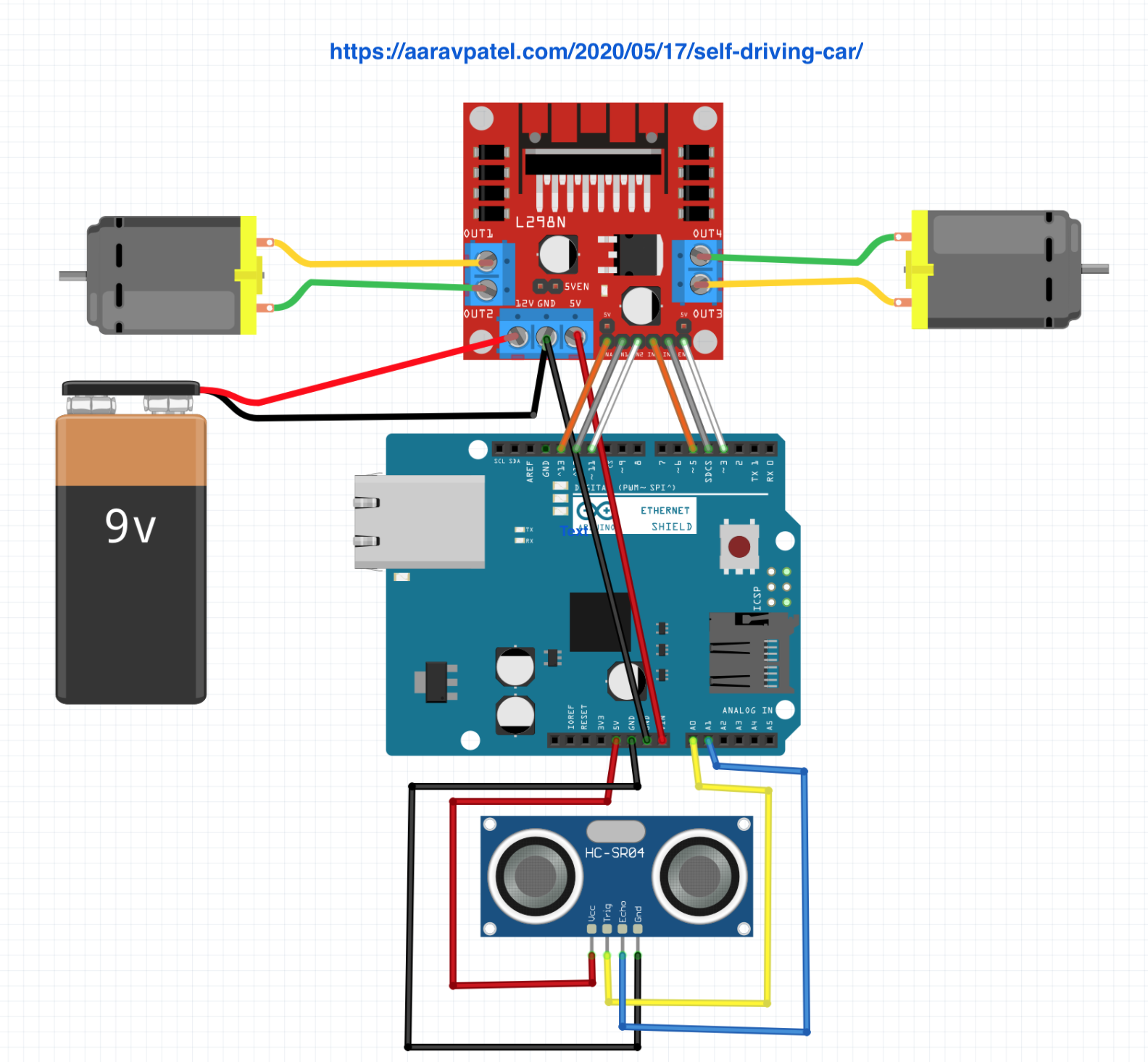
Components neededWhat is an L298N Motor Driver?The image above is an L298N Motor Driver. The L298N is a dual H-Bridge motor driver which allows the speed and the direction control of two DC motors at the same time. We can also use this motor driver to control one stepper motor.
The table above shows the connections of the L298N module.
Completed CircuitThe Code #include <HCSR04.h>
UltraSonicDistanceSensor ultrasonic(A0,A1);
float distance;
int leftMotorSpeedPin = 3;
int leftMotorForwardPin = 4;
int leftMotorBackwardPin = 5;
int rightMotorSpeedPin = 11;
int rightMotorForwardPin = 12;
int rightMotorBackwardPin = 13;
void setup() {
pinMode(leftMotorSpeedPin, OUTPUT);
pinMode(leftMotorForwardPin, OUTPUT);
pinMode(leftMotorBackwardPin, OUTPUT);
pinMode(rightMotorSpeedPin, OUTPUT);
pinMode(rightMotorForwardPin, OUTPUT);
pinMode(rightMotorBackwardPin, OUTPUT);
Serial.begin(9600);
digitalWrite(leftMotorSpeedPin, HIGH);
digitalWrite(rightMotorSpeedPin, HIGH);
}
void loop() {
distance = ultrasonic.measureDistanceCm();
Serial.println(distance);
if (distance > -1 && distance < 25) {
stop();
delay(1000);
goBackward();
delay(300);
stop();
delay(1000);
if(random(0, 2) == 0) {
goLeft();
} else {
goRight();
}
delay(500);
stop();
delay(700);
} else {
goForward();
}
}
void goForward() {
digitalWrite(leftMotorForwardPin, HIGH);
digitalWrite(leftMotorBackwardPin, LOW);
digitalWrite(rightMotorForwardPin, HIGH);
digitalWrite(rightMotorBackwardPin, LOW);
}
void goBackward() {
digitalWrite(leftMotorForwardPin, LOW);
digitalWrite(leftMotorBackwardPin, HIGH);
digitalWrite(rightMotorForwardPin, LOW);
digitalWrite(rightMotorBackwardPin, HIGH);
}
void stop() {
digitalWrite(leftMotorForwardPin, LOW);
digitalWrite(leftMotorBackwardPin, LOW);
digitalWrite(rightMotorForwardPin, LOW);
digitalWrite(rightMotorBackwardPin, LOW);
}
void goRight() {
digitalWrite(leftMotorForwardPin, HIGH);
digitalWrite(leftMotorBackwardPin, LOW);
digitalWrite(rightMotorForwardPin, LOW);
digitalWrite(rightMotorBackwardPin, LOW);
}
void goLeft() {
digitalWrite(leftMotorForwardPin, LOW);
digitalWrite(leftMotorBackwardPin, LOW);
digitalWrite(rightMotorForwardPin, HIGH);
digitalWrite(rightMotorBackwardPin, LOW);
}
The video below shows a quick demonstration of the self driving arduino car.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}

Comments
Please log in or sign up to comment.