


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
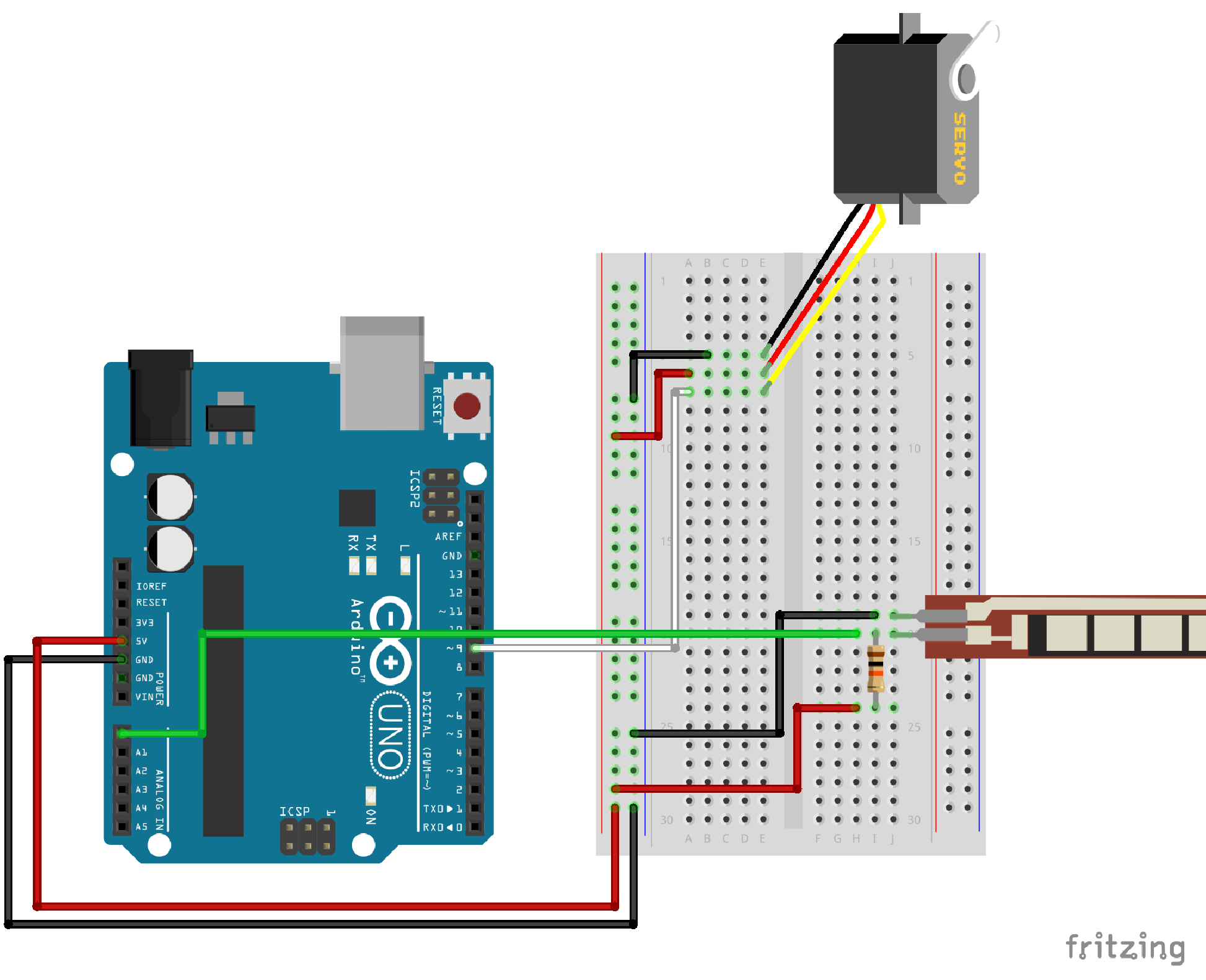
When your hands are full, you can't really open the door without putting your carrying items down. With my project it uses a motion detector to tell when the door is closed and automatically opens it for you. It works by turning a motor that is connected to the door.
{kind=link}

0 projects • 5 followers
I am a 10th grader at Mission San Jose High School and robotics and Machine Learning is what I am good at!
Comments
Please log in or sign up to comment.