The Tamiya dual motor gear box is popular but has problems interfacing with standard Arduino drivers because of its small size and low voltage requirements.
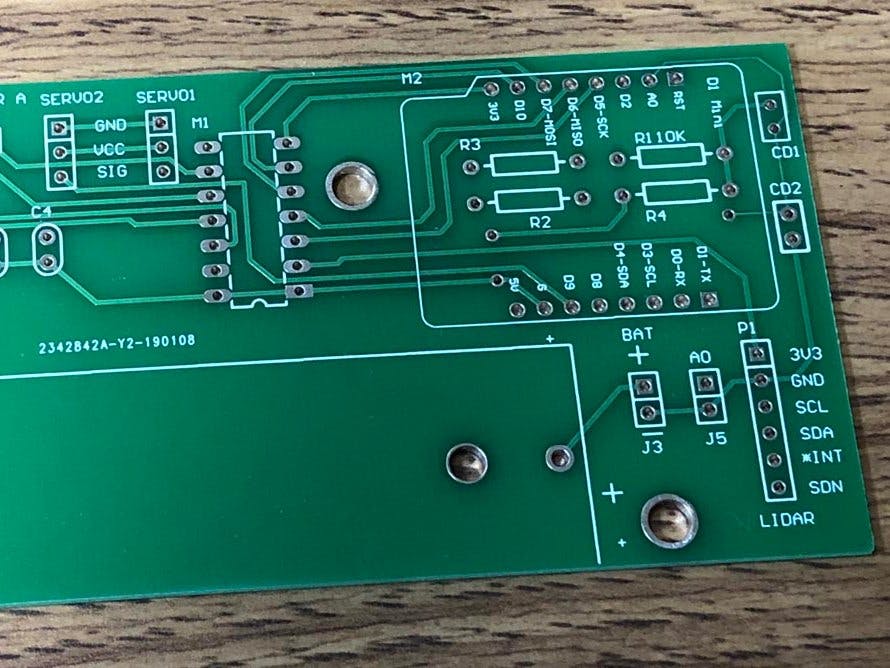
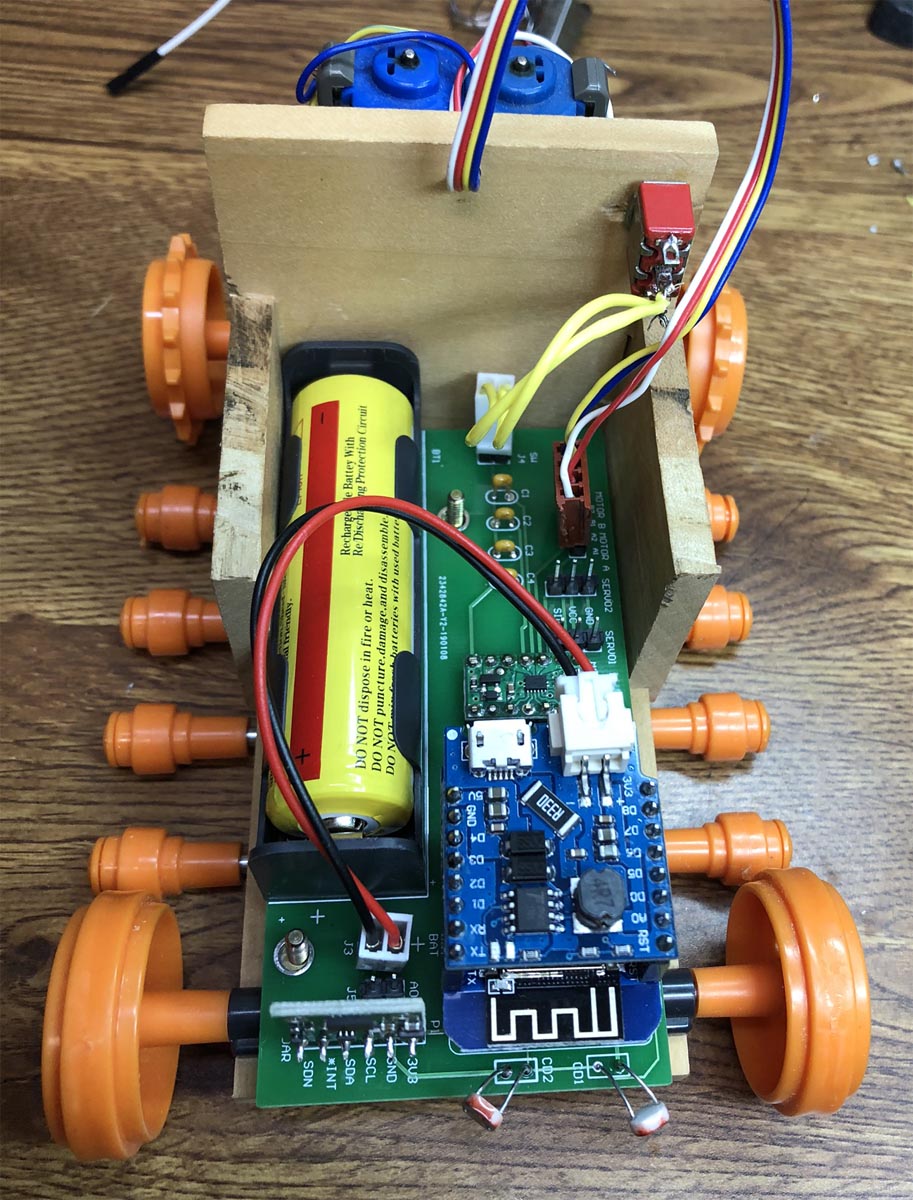
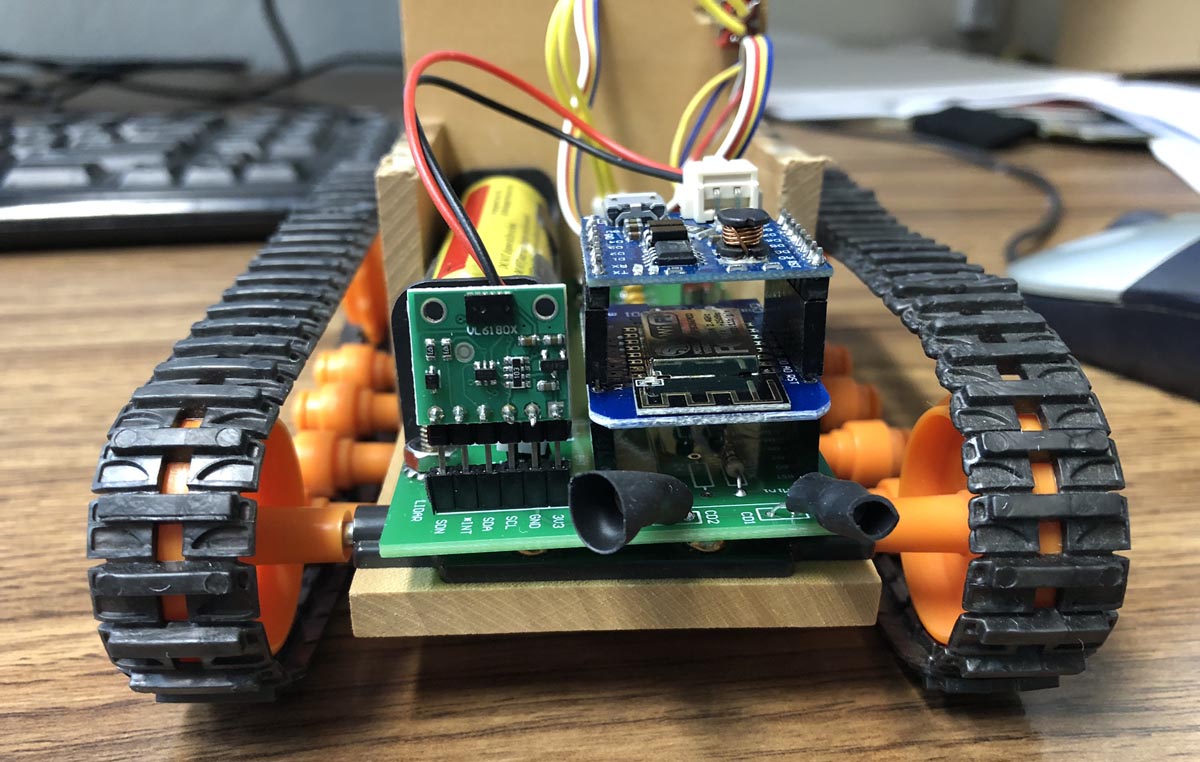
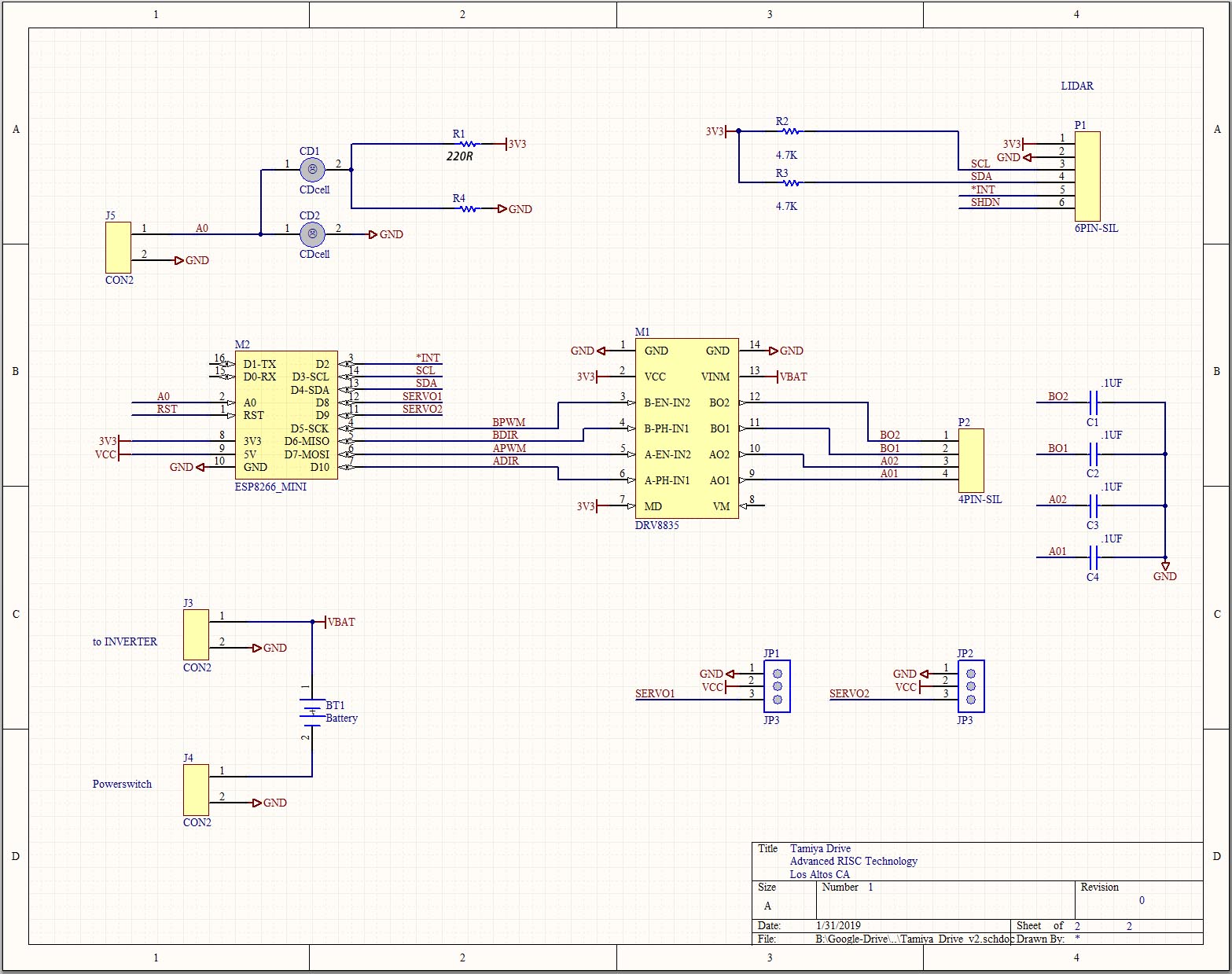
We solved this by making a 2x4-inch PC board which incorporates a single 18650 li-ion cell, Pololu DRV8835 motor driver, and a combo of Wemos D1 Mini ESP8266 and Wemos D1 Mini Battery Shield. We also included two servo headers and a header for the VL6180 Lidar module as well as two CDS photoresistors for light sensing.
The Tamiya motors are driven by the output of the 18650 which is about 3.7 to 4.2 volts. This means they can have large current drive without being boosted by the 5V output inverter of the battery shield. Because we are using an ESP 8266 microprocessor, you can also drive the gearbox with HTML or Blynk apps. VL6180 Lidar also allows for automatic obstacle avoidance.









{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.