/* Project to demonstrate use of multiple interrupts in a real world situation.
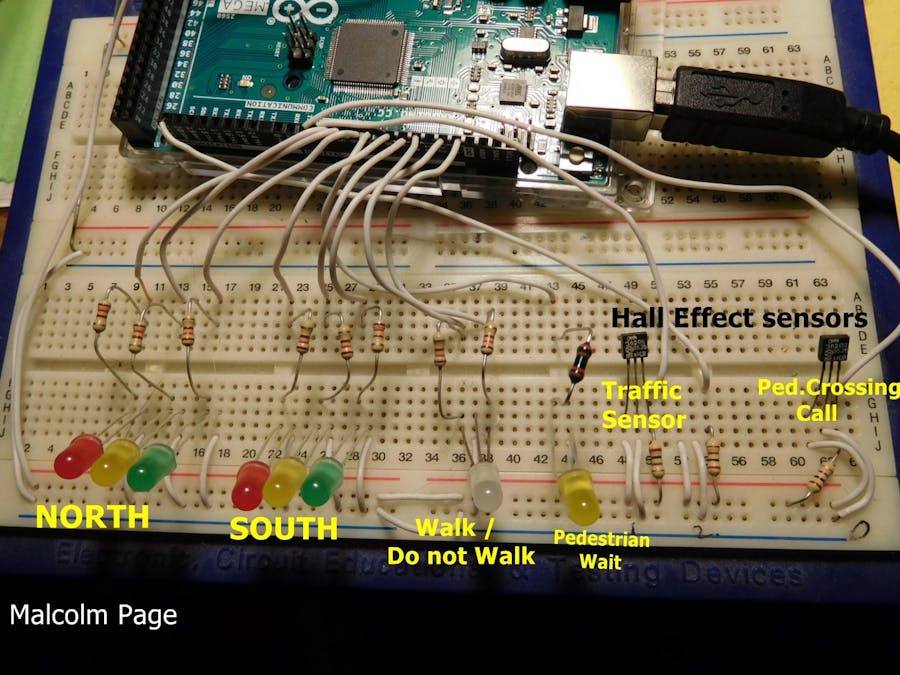
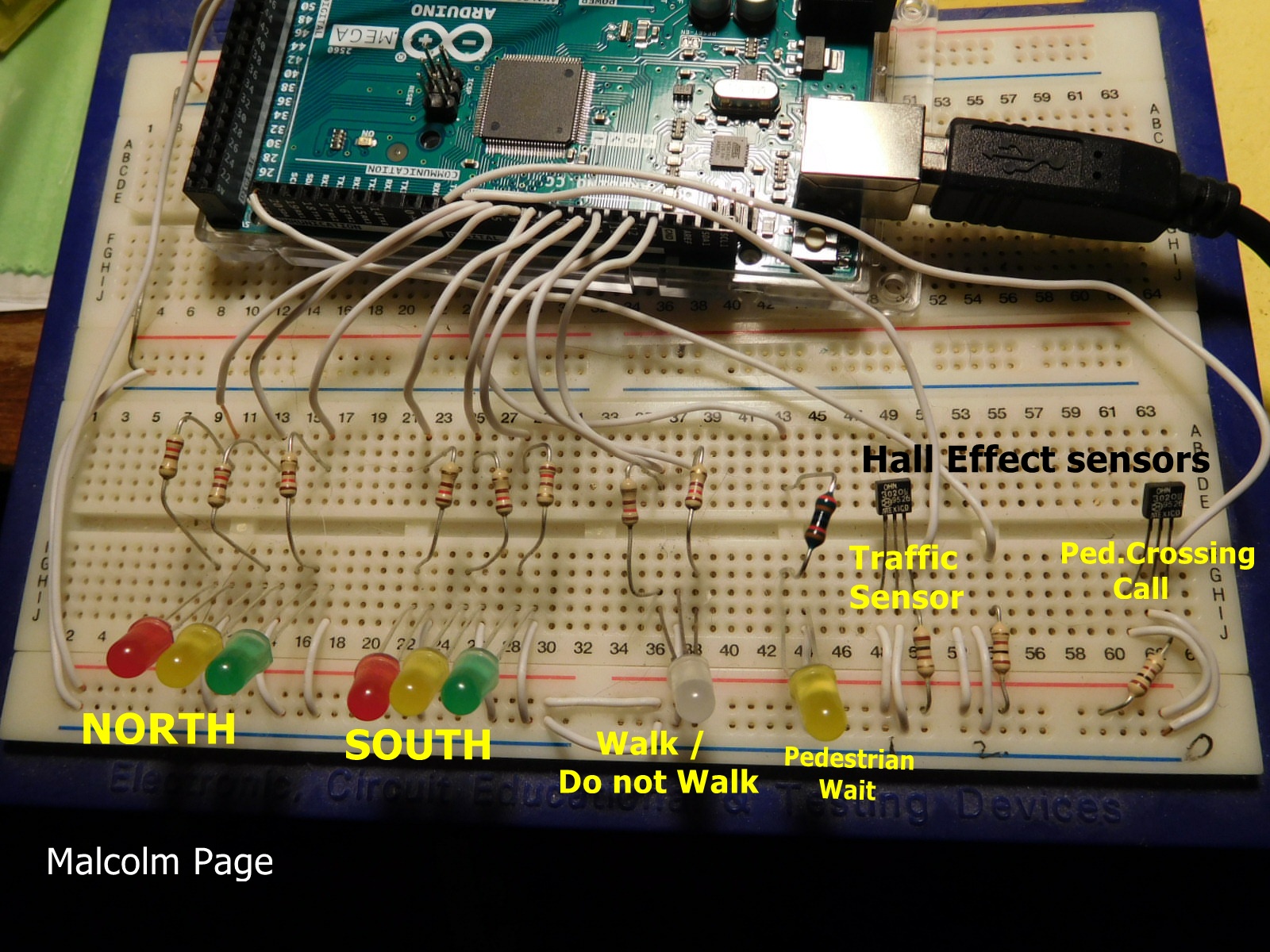
Traffic light control with pedestrian crossing
lights.UK light cycle. Can be changed to USA and EU with no Amber shown on Red to Green
by // out lines 77,95.
1 interrupt Peestrian request is latched in and subsquent presses are ignored
until crossing cycle completed.
2 interurupt detected traffic sense to prolong green period depending on
traffic volume but time limited so as not to block one way. Default green time set by "flowTime" and
modified by "extraDelay" which is limited to one interrupt value set in subroutine call.
Run on ARDUINO Mega 2560.
Malcolm Page March 2021. updated January 05 2022.new functions 7/1,Test Func addded 9/1
Contact malcolm@gbapj.com
================================================================================= */
int button0 = 2;
int button1 = 3;
int button2 = 21;
int button3 = 20;
int button4 = 19;
// int button5=18;
const int north_redpin = 5;
const int north_orangpin = 4;
const int north_grnpin = 6;
const int south_redpin = 8;
const int south_orangpin = 9;
const int south_grnpin = 12;
const int pedRedpin = 13;
const int pedGrnpin = 10;
const int pedWaitpin = 7;
const int crossTime = 10000; // Time pedestrian to cross
const int flowTime = 5000; // Time for traffic to flow will be modified by traffic sensor interrupt variable "extraDelay"
const int amberTime = 2000;
const int TrfWait=5000;
const int RedPause=3000;
int pedReq = 0;
int northDelay = 0;
int southDelay = 0;
int NextraDelay = 0;
int SextraDelay = 0;
int CrossCalls = 0;
//==================================================================
void setup()
{
Serial.begin(9600);
pinMode (pedGrnpin, OUTPUT);
pinMode (pedRedpin, OUTPUT);
pinMode (north_redpin, OUTPUT);
pinMode (north_orangpin, OUTPUT);
pinMode (north_grnpin, OUTPUT);
pinMode (south_redpin, OUTPUT);
pinMode (south_orangpin, OUTPUT);
pinMode (south_grnpin, OUTPUT);
pinMode(button0, INPUT);
pinMode(button1, INPUT);
pinMode(button2, INPUT);
pinMode(button3, INPUT);
pinMode(button4, INPUT);
// pinMode(button5,INPUT);
pinMode(pedWaitpin, OUTPUT);
TestLights(); // Test lights
delay(5000);
digitalWrite(north_redpin, HIGH); // INITIAL STATE SET TO
digitalWrite(south_grnpin, HIGH); // NORTH RED SOUTH GREEN
digitalWrite(pedRedpin, HIGH); //initial set to RED
attachInterrupt(0, CrossingRequest, RISING); //int 0 on Pin 2
attachInterrupt(1, DelayNorthRequest, RISING); //int 1 on Pin 3
attachInterrupt(2, DelaySouthRequest, RISING); //int 2 on Pin 21
attachInterrupt(3, Funct3, RISING); //int 3 on Pin 20
attachInterrupt(4, Funct4, RISING); //int 4 on Pin 19
// attachInterrupt(5,Funct5,RISING); //int 5 on Pin 18
delay(flowTime);
}
//================================== Main core of programme ==============================
void loop()
{
digitalWrite(south_orangpin, HIGH);
digitalWrite(south_grnpin, LOW);
delay(amberTime); // Changing pause
digitalWrite(south_orangpin, LOW);
digitalWrite(south_redpin, HIGH); // sets south to stop
delay(RedPause); // wait both stop
digitalWrite(north_orangpin, HIGH); // disable for USA/EU Sequence
delay(amberTime); // Pause amber north
digitalWrite(north_redpin, LOW);
digitalWrite(north_orangpin, LOW);
digitalWrite(north_grnpin, HIGH); // sets north to go
delay(flowTime);
Serial.println("86");
delay(NextraDelay);
Serial.println(NextraDelay);
NextraDelay = 0;
delay(TrfWait); // wait for more traffic
Serial.println("91");
delay(NextraDelay);
Serial.println (NextraDelay);
NextraDelay = 0;
digitalWrite(north_orangpin, HIGH); // set north to stop
digitalWrite(north_grnpin, LOW);
delay(amberTime); // pause amber
digitalWrite(north_redpin, HIGH);
digitalWrite(north_orangpin, LOW);
delay(RedPause); // wait both stop
if (pedReq > 1) setcrossing();
digitalWrite(south_orangpin, HIGH); // disable for USA/EU Sequence
delay(amberTime); // pause amber south
digitalWrite(south_redpin, LOW);
digitalWrite(south_grnpin, HIGH);
digitalWrite(south_orangpin, LOW); // set south to go
delay(flowTime);
Serial.println("104");
delay(SextraDelay);
Serial.println(SextraDelay);
SextraDelay=0;
Serial.println("106");
delay(TrfWait);
Serial.println("108"); // wait for more traffic
delay(SextraDelay);
Serial.println(SextraDelay);
SextraDelay = 0;
if (pedReq > 0)
{
pedReq++; // hold off crossing for a further sequence
}
}
//======================= Subroutines (Functions) ==========================
void CrossingRequest() // Interrupt 0 here
{
setwait();
}
//-------------------------------------------------
void DelayNorthRequest() // Interrupt 2 here
{
waitnorth();
}
//-------------------------------------------------
void DelaySouthRequest() // intereupt 1 here
{
waitsouth();
}
//-------------------------------------------------
void setwait()
{
delay(50);
(CrossCalls++);
if (pedReq > 0) return;
digitalWrite(pedWaitpin, HIGH);
pedReq = 1;
}
//-------------------------------------------------
void setcrossing()
{
digitalWrite(south_redpin, HIGH); // sets south to stop
delay(2000);
digitalWrite(pedWaitpin, LOW);
digitalWrite(pedRedpin, LOW);
digitalWrite(pedGrnpin, HIGH);
delay(crossTime);
digitalWrite(pedGrnpin, LOW);
flashpedred();
digitalWrite(pedRedpin, HIGH);
delay(2000);
pedReq = 0; // Re-enable crossing request
}
//-------------------------------------
void flashpedred()
{
for (int i = 1; i <= 20; i++) {
digitalWrite(pedRedpin, HIGH);
delay(250);
digitalWrite(pedRedpin, LOW);
delay(250);
}
}
//-------------------------------------
void flashpedgreen()
{
for (int i = 1; i <= 20; i++) {
digitalWrite(pedGrnpin,HIGH);
delay(250);
digitalWrite(pedGrnpin,LOW);
delay(250);
}
}
//------------------------------------
void waitnorth()
{
NextraDelay = 15000;
Serial.println("north");
}
//------------------------------------
void waitsouth()
{
SextraDelay = 15000;
Serial.println("south");
}
//--------------------------------------
void Funct3()
{
Serial.println("Funct 3");
}
//+++++++++++++++++++++++++++++++++++
void Funct4()
{ Serial.println("Funct4");
}
//+++++++++++++++++++++++++++++++++
void TestLights()
{
digitalWrite(south_orangpin, HIGH);
digitalWrite(south_redpin, HIGH);
digitalWrite(south_grnpin, HIGH);
digitalWrite(north_grnpin, HIGH);
digitalWrite(north_orangpin, HIGH);
digitalWrite(north_redpin, HIGH);
digitalWrite(pedWaitpin, HIGH);
flashpedred();
flashpedgreen();
digitalWrite(south_orangpin, LOW);
digitalWrite(south_redpin, LOW);
digitalWrite(south_grnpin, LOW);
digitalWrite(north_grnpin, LOW);
digitalWrite(north_orangpin, LOW);
digitalWrite(north_redpin, LOW);
digitalWrite(pedWaitpin, LOW);
}
//+++++++++++++++++++++++++++++++++++++++++

_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)


{kind=link}

Comments