/*Author: Ajaya Dahal
* created on: 08/20/2018
*/
/*-------definning Inputs------*/
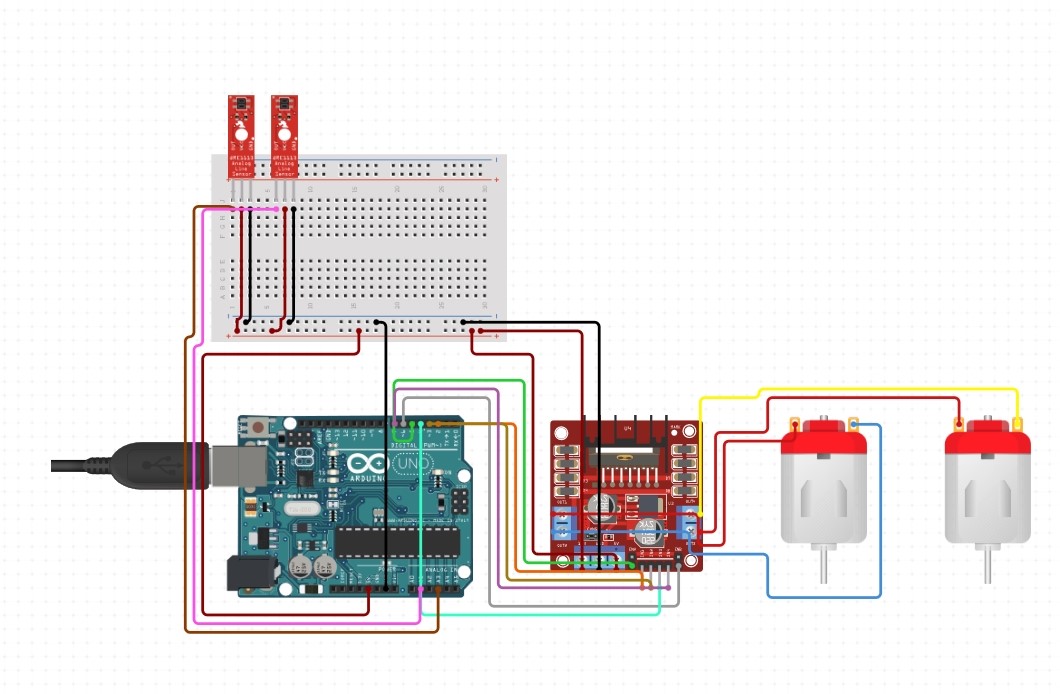
#define leftSensor 2 // left sensor
#define rightSensor 3 // right sensor
/*-------definning Outputs------*/
#define leftMotor 4 // left motor
#define leftMotor2 5 // left motor
#define rightMotor1 6 // right motor
#define rightMotor2 7 // right motor
void setup()
{
pinMode(leftSensor, INPUT);
pinMode(rightSensor, INPUT);
pinMode(leftMotor, OUTPUT);
pinMode(leftMotor2, OUTPUT);
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
}
void loop()
{
if(digitalRead(leftSensor) && digitalRead(rightSensor)) // Move Forward
{
digitalWrite(leftMotor, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
}
if(!(digitalRead(leftSensor)) && digitalRead(rightSensor)) // Turn right
{
digitalWrite(leftMotor, LOW);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
}
if(digitalRead(leftSensor) && !(digitalRead(rightSensor))) // turn left
{
digitalWrite(leftMotor, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
}
if(!(digitalRead(leftSensor)) && !(digitalRead(rightSensor))) // stop
{
digitalWrite(leftMotor, LOW);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.