import processing.serial.*;
Serial myPort;
String ang="";
String distance="";
String data="";
int angle, dist;
void setup() {
size (2000,800);
myPort = new Serial(this,"COM3", 9600);
myPort.bufferUntil('.');
background(0);
}
void draw() {
fill(0,5);
noStroke();
rect(0, 0, width, height*0.93);
noStroke();
fill(0,255);
rect(0,height*0.93,width,height);
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
int index1 = data.indexOf(",");
ang= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
angle = int(ang);
dist = int(distance);
System.out.println(angle);
}
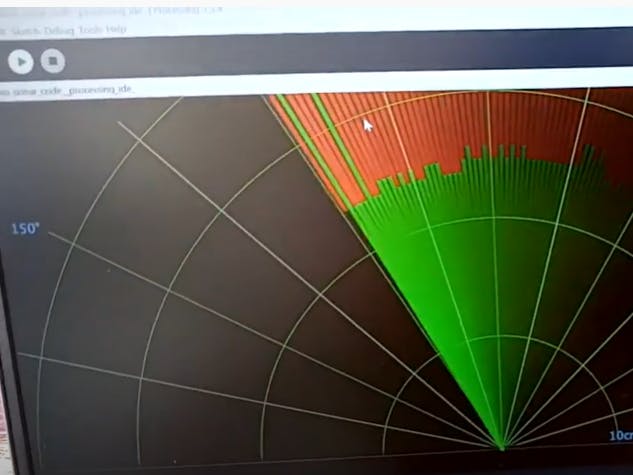
void drawRadar(){
pushMatrix();
noFill();
strokeWeight(0.5);
stroke(10,255,10);
translate(width/2,height-height*0.06);
line(-width/2,0,width/2,0);
arc(0,0,(width*0.5),(width*0.5),PI,TWO_PI);
arc(0,0,(width*0.25),(width*0.25),PI,TWO_PI);
arc(0,0,(width*0.75),(width*0.75),PI,TWO_PI);
arc(0,0,(width*0.95),(width*0.95),PI,TWO_PI);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
stroke(175,255,175);
line(0,0,(-width/2)*cos(radians(15)),(-width/2)*sin(radians(15)));
line(0,0,(-width/2)*cos(radians(45)),(-width/2)*sin(radians(45)));
line(0,0,(-width/2)*cos(radians(75)),(-width/2)*sin(radians(75)));
line(0,0,(-width/2)*cos(radians(105)),(-width/2)*sin(radians(105)));
line(0,0,(-width/2)*cos(radians(135)),(-width/2)*sin(radians(135)));
line(0,0,(-width/2)*cos(radians(165)),(-width/2)*sin(radians(165)));
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(0,255,0);
translate(width/2,height-height*0.06);
line(0,0,(width/2)*cos(radians(angle)),(-width/2)*sin(radians(angle)));
popMatrix();
}
void drawObject() {
pushMatrix();
strokeWeight(9);
stroke(255,0,0);
translate(width/2,height-height*0.06);
float pixleDist = (dist/40.0)*(width/2.0);
float pd=(width/2)-pixleDist;
float x=-pixleDist*cos(radians(angle));
float y=-pixleDist*sin(radians(angle));
if(dist<=40){
line(-x,y,-x+(pd*cos(radians(angle))),y-(pd*sin(radians(angle))));
}
popMatrix();
}
void drawText(){
pushMatrix();
fill(100,200,255);
textSize(25);
text("10cm",(width/2)+(width*0.115),height*0.93);
text("20cm",(width/2)+(width*0.24),height*0.93);
text("30cm",(width/2)+(width*0.365),height*0.93);
text("40cm",(width/2)+(width*0.45),height*0.93);
if(dist<=40) {
text("Distance :"+dist,width*0.7,height*0.99);
}
translate(width/2,height-height*0.06);
textSize(25);
text(" 30",(width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
text(" 60",(width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
text("90",(width/2)*cos(radians(91)),(-width/2)*sin(radians(90)));
text("120",(width/2)*cos(radians(123)),(-width/2)*sin(radians(118)));
text("150",(width/2)*cos(radians(160)),(-width/2)*sin(radians(150)));
popMatrix();
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments