My car gets messed with a lot. People cut into the cloth top, and I've had it cut again when replaced.
So I built a robot guard. I tapped into the fusebox in my car to find a circuit that is live when the car is off. There are two motion sensors on either side, and if the robot detects movement, it turns on its LEDs and evil eyes and rotates toward the direction of movement. I used WIFI radar sensors so that they would work through glass without having to be placed outside the car.
I made a 3D model of the head, but after several failed 12 hour prints, I just made it out of wood and painted it. I used an Arduino CNC shield run headless (without an arduino) with an A4998 driver. I limited the current on the step stick by following this guide: https://www.makerguides.com/a4988-stepper-motor-driver-arduino-tutorial/
I have the LTE board and camera hooked up with the goal of taking photos if motion is detected, and upload the photos to the cloud. That's still a TODO at this point, the making of the base and head, and wiring of the 8 LED strands, eyes, relay, radar sensors, CNC, and stepper motor took a lot of time.
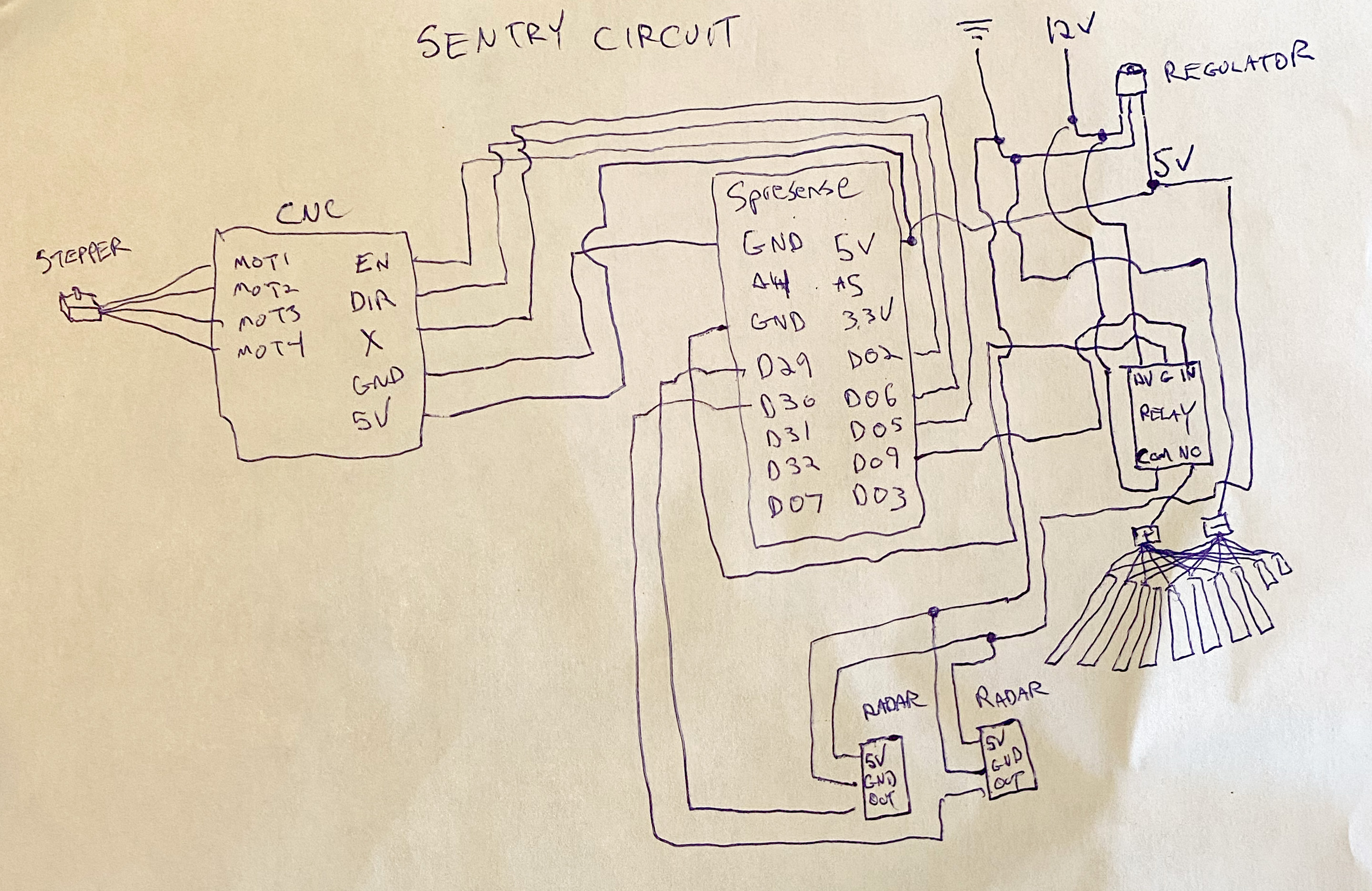
The base has a CNC shield that requires both 12V and 5V power. The head has a 12V relay for the LEDs, and a regulator to step the power down to 5V. I followed this schematic with two capacitors to make a decoupling capacitor circuit:
The 5V powers the spresense, runs out to the radar sensors, and then had to be run back down to the base to power the CNC shield.














{kind=link}
Comments
Please log in or sign up to comment.