

Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
If you want to play without a mask in a sports hall, then you need an arduino for area surveillance. If someone wants to control you, then an alarm is triggered. Enjoy doing sport!
You can use any Arduino board that you have for transmitter and receiver.
Sender – Arduino Nano with LoRa module and HC-SR04.
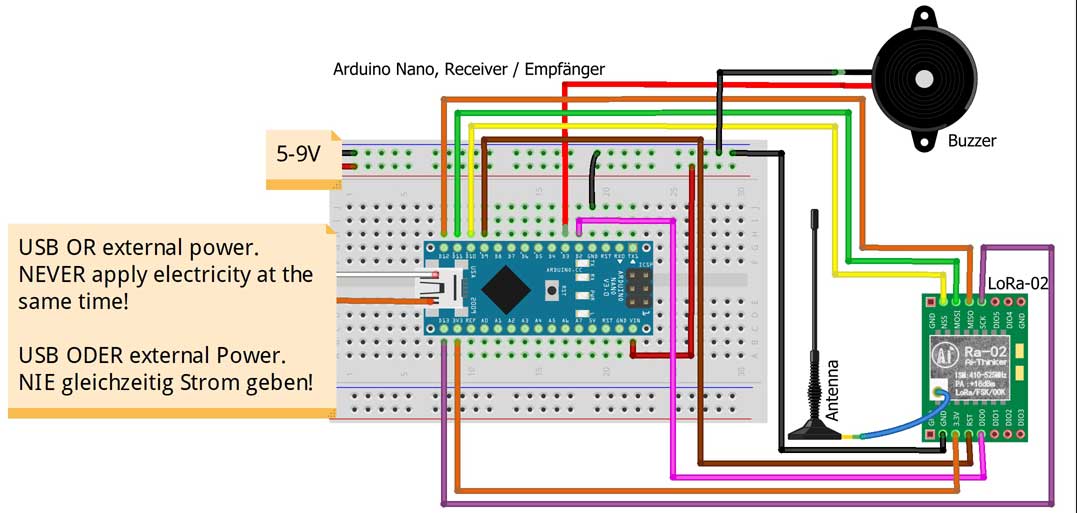
Receiver – Arduino Nano with LoRa module and Piezo.
How-to action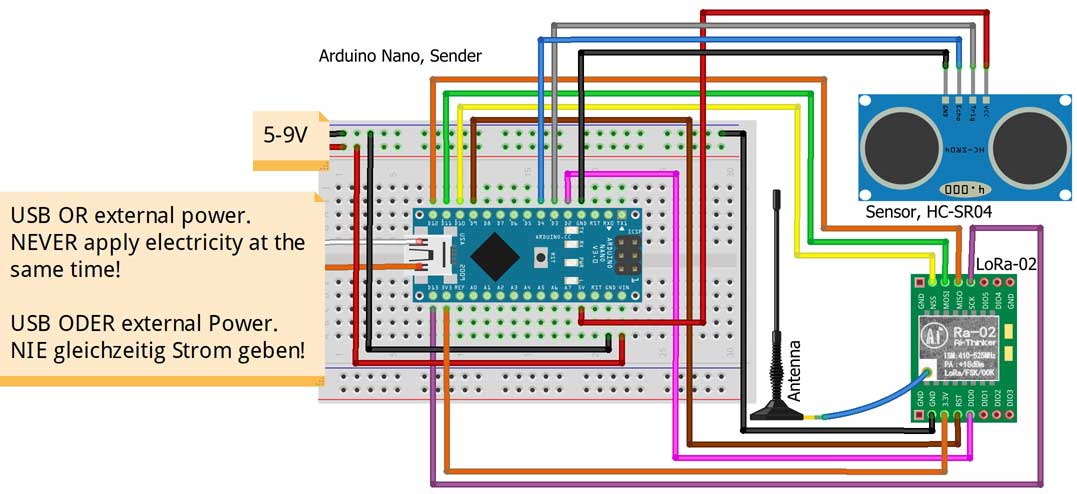
/*
* code for ultrasonic sensor hc-sr05
*
* description: playground.arduino.cc/Code/NewPing
*
************ hc-sr05 module
*/
// hcsr05 ////////////////////////////////
#include <NewPing.h> // library for newping methods
#include <dmtimer.h> // library for dmtimer methods
//
// vcc: power 5V
#define trigPin 3 // trig: pwm 3
#define echoPin 4 // echoPin: pwm 4
// gnd: black
#define DistanceMax 10000 // 1000cm = 1m
//
NewPing sonar1(trigPin, echoPin, DistanceMax);
DMTimer myTimer1(50000); // set mytimer1 to 50ms (50000 = 50ms)
//////////////////////////////////////////
/*
* interfacing sx1278 (ra-02) lora module with arduino nano
*
* copyright (c) sandeep mistry. all rights reserved. licensed under the mit license.
*
* description: circuitdigest.com/microcontroller-projects/arduino-lora-sx1278-interfacing-tutorial
*
************ lora module
*/
// LoRa-02////////////////////////////////
#include <SPI.h> // library for spi methods
#include <LoRa.h> // library for lora methods
//
int counter = 0; //
//////////////////////////////////////////
#define DEBUG 1 // read debug information (1 = send data to serial port)
int Distance = 0; // distance current (init=0)
int DistHarmonic = 0; // distance harmonic (dynamischer mittelwert pro sekunde, init=0)
int z = 0; // use 20 cicles for harmanic distance
int DistRealCur = 0; // current real distance
int DistRealOld = 0; // old real distance (bevor a second)
int HarmonicLoop = 2; // how many harmonic loop
int DelayBetween = 4000; // delay between measurements (perhaps 5 minutes)
bool alert = false; // if something happen then alert is true
//////////////////////////////////////////
void setup(){
Serial.begin(9600);
while (!Serial);
Serial.println("LoRa Sender");
if (!LoRa.begin(433E6)) { // frequency 433 MHz for switzerland and eu
Serial.println("Starting LoRa failed!");
while (1);
}
}
void hcsr05(){
if (myTimer1.isTimeReached()){ // wait 50ms between pings (about 20 pings/sec)
// 29ms should be the shortest "delay" between pings
Distance = sonar1.ping_cm();
if (Distance != 0) {
#if DEBUG == 1
Serial.print("Distance: ");
Serial.print(Distance);
Serial.println(" cm");
#endif
z++;
if (z <= HarmonicLoop) {
DistHarmonic = DistHarmonic + Distance;
#if DEBUG == 1
//Serial.print("DistHarmonic: ");
//Serial.print(DistHarmonic);
//Serial.println(" cm");
#endif
} else {
DistRealCur = DistHarmonic / HarmonicLoop;
if (DistRealOld - DistRealCur > 20){
alert = true; // alarm = true if old and cur distance is different
ota(); // call ota function and send data
}
DistRealOld = DistRealCur;
DistHarmonic = 0; // start new harmonic cicle loop
z = 0;
DistRealCur = 0;
}
}
}
}
void ota(){
Serial.print("Sending alert packet: ");
Serial.print(counter);
// send alert packet
#if DEBUG == 1
Serial.print(". Sending alert signal!! Distance = ");
Serial.print(DistRealCur);
Serial.println("cm");
#endif
LoRa.beginPacket();
LoRa.print("Alarm ausgeloest");
// LoRa.print(counter);
LoRa.endPacket(); // transmit over the air (ota)
counter++;
delay(DelayBetween); // set to 10 minutes in productive areas
alert = false;
}
void loop(){
hcsr05(); // call sonar function
}
/*
* interfacing sx1278 (ra-02) lora module with arduino nano
*
* copyright (c) sandeep mistry. all rights reserved. licensed under the mit license.
*
* description: circuitdigest.com/microcontroller-projects/arduino-lora-sx1278-interfacing-tutorial
*
************ lora module
*/
// lora-02 ///////////////////////////////
#include <SPI.h> // library for spi methods
#include <LoRa.h> // library for lora methods
//
//////////////////////////////////////////
const String SenderString = ""; // input is "Alarm ausgeloest" when something happen
/*
* piezo alarm
*
* specify digital pin on the arduino nano that
* the positive lead of piezo buzzer is attached
************ buzzer module
*/
int piezoPin = 3; // buzzer to arduino nano pin 3
int AlertCount = 0; //
int AlertMax = 7; // how many times (default = 7)
//////////////////////////////////////////
#define DEBUG 1 // read debug information (1 = send data to serial port)
//////////////////////////////////////////
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.println("LoRa Receiver");
if (!LoRa.begin(433E6)) { // frequency 433 MHz for switzerland and eu
Serial.println("Starting LoRa failed!");
while (1);
}
}
void piezoalert() {
while (AlertCount < AlertMax){
/*tone needs 2 arguments, but can take three
1) pin#
2) frequency - this is in hertz (cycles per second) which determines the pitch of the noise made
3) duration - how long teh tone plays
*/
tone(piezoPin, 900, 300);
delay(500);
AlertCount++;
}
}
void loop() {
// try to parse packet
int packetSize = LoRa.parsePacket();
if (packetSize) {
// received a packet
Serial.print("Received packet '");
// read packet
while (LoRa.available()) {
// Serial.print((char)LoRa.read());
SenderString = (char)LoRa.read();
Serial.print(SenderString);
}
// print rssi of packet
Serial.print("', signal strength to sender is ");
Serial.println(LoRa.packetRssi());
if (SenderString == "t") {
piezoalert(); // call alarm function
AlertCount = 0; // reset
}
}
}

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments