



What Do I Build Next?
I think I'll convert one of my Raspberry Pi Tank vehicles to an Arduino based Robot using a Kookye Tank Electronics Kit or At least setup the kits' electronics 1st....The Instruction DVD should have a 10 Star Rating in itself.... Buy this electronics kit, (just for the DVD and training lessons) You'll learn alot!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!As in my Part x of 4 Projects, I purchased two Tank Vehicles from Banggood and had many Osoyoo and Kookye Robot Car/vehicles kits from Amazon, still unassembled "later What Do I Build Next? Projects", I originally planned to use a Raspberry Pi control scheme and adapt that schema to both Tanks using different model Raspberry Pi's ( a Raspberry Pi Zero-W v1.3 and a Raspberry Pi 3A+)
My assembly methods and mockups are my preference and constantly changing, so I am non-committal? Indecisive? or just a HACK!
These Available Guide(s) were consulted studied and expanded upon to build previous multi-track tanked vehicles:
http://osoyoo.com/2017/08/osoyoo-robot-car-diy-introduction/
http://osoyoo.com/2017/10/09/raspberry-pi-starter-kit-v1-introduction/
http://osoyoo.com/2017/04/arduinosmartcarlesson1/
http://osoyoo.com/2016/06/13/internet-of-thingsiot-starter-kit-on-raspberry-pi/
http://osoyoo.com/2017/05/wifi-control-smart-car/
http://osoyoo.com/2017/05/tracking-smart-car/
http://osoyoo.com/2017/05/arduino_car_obstacle_avoidance/
http://osoyoo.com/2017/04/control-smart-car-with-ir/
http://kookye.com/2018/07/19/rasberry-pi-tank-robot-car-starter-kit-lesson-1package-list/
http://kookye.com/2018/07/19/rasberry-pi-tank-robot-car-starter-kit-lesson-2raspberry-pi-3b-board/
http://kookye.com/2018/07/20/rasberry-pi-tank-car-starter-kit-lesson-3-web-video-camera/
http://kookye.com/2018/07/19/rasberry-pi-tank-robot-car-starter-kit-lesson-3line-follow/
1. Gather Hardware and Electronics
1a. Layout the Electronic parts
1b. Assemble Battery Pack and power distribution
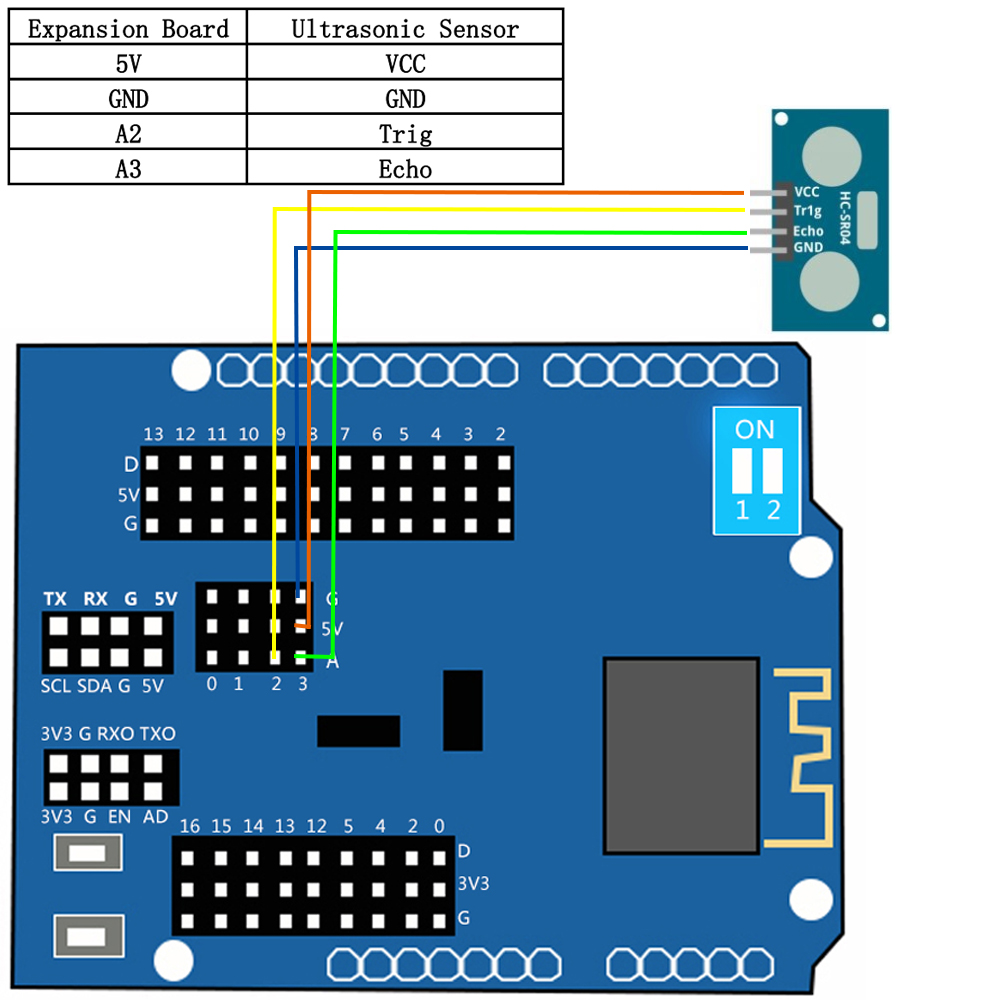
1c. Assemble the Ultrasonic Sensor and servo assembly
1d. Layout and install electronic components on acrylic backing plate
1e. *****OOOppps, remove protective film from acrylic mounting plate 1st....
1f. ANOTHER OOOOpppps!!!!! Do not overtighten nuts...or was it the "lock-tight" that did it...
1g. Remount electronics to another backing plate
1g. Chassis Integration?
What will I do HERE???????????????????????
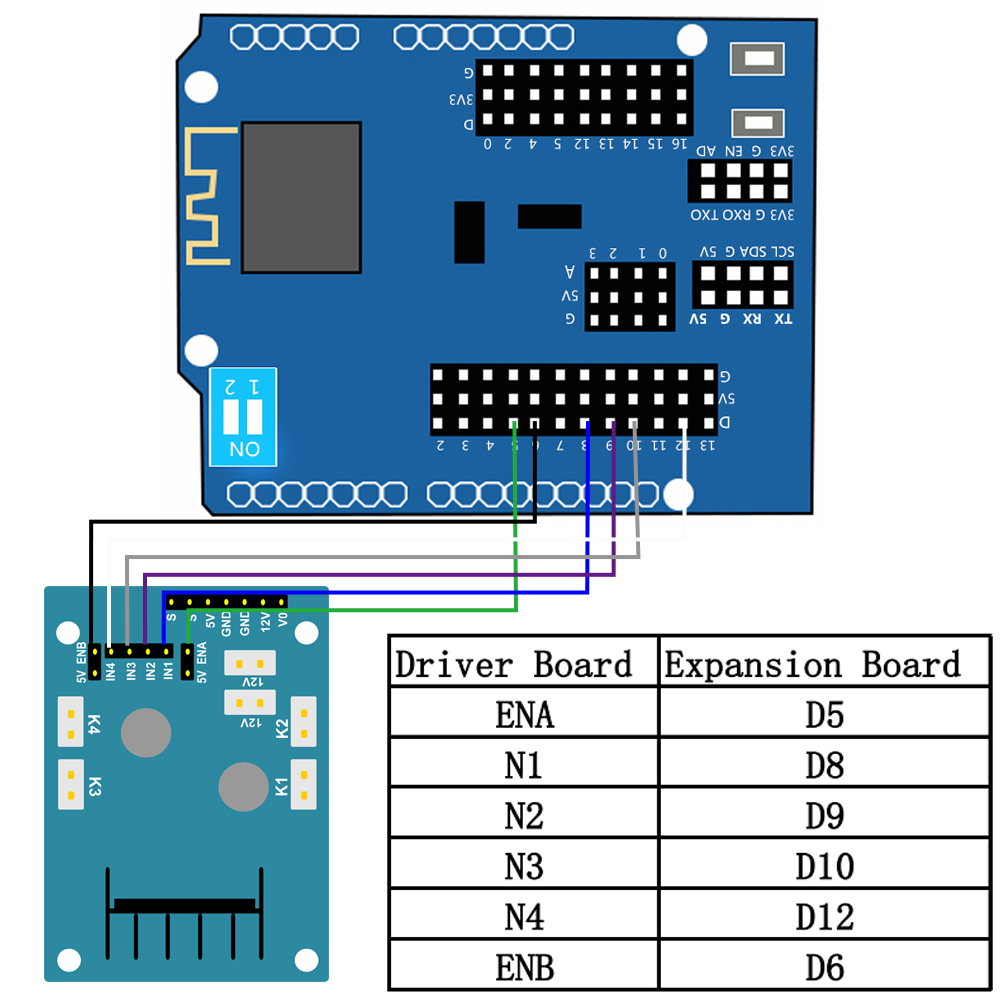
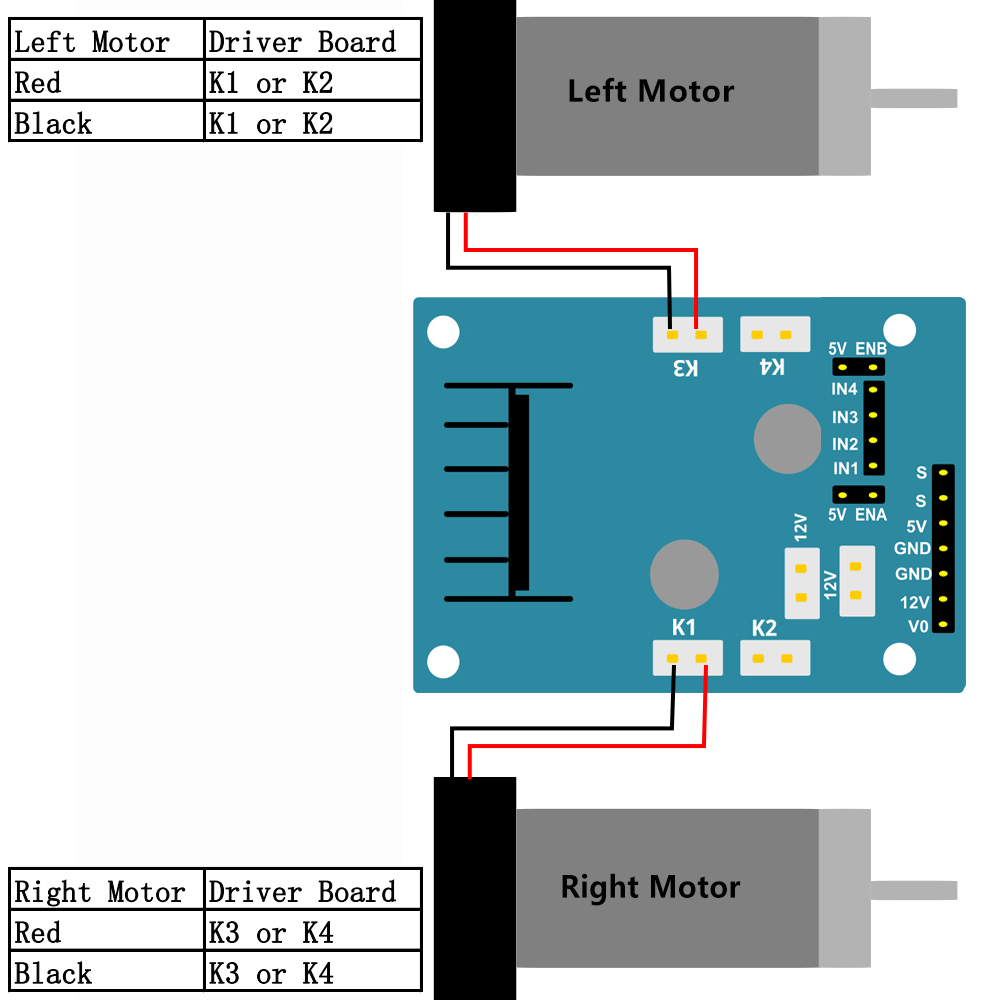
I do not have the DC Motors that connect to this L298N Motor controller board via the default connectors, but I'll MacGyver something....
2. Interconnect Control Electronic modules- Note ALL schematics were downloaded from DVD that was included with this kit, This DVD is configured as a training guide with instruments and code examples.... very GOOD documentation for a change.
3. Coding and testing- Learning lessons
OSOYOO Robot Car Starter Kit Tutorial: Introductionhttp://osoyoo.com/2017/08/osoyoo-robot-car-diy-introduction/
OSOYOO Robot Car Starter Kit Lesson 1: Install UNO R3 Board and Motors on Chassishttp://osoyoo.com/2017/04/arduinosmartcarlesson1/
OSOYOO Smart Car Starter Kit Lesson 2: Control Robot Car through Infrared Remotehttp://osoyoo.com/2017/04/control-smart-car-with-ir/
OSOYOO Robot Car Starter Kit Lesson 3: Obstacle Avoidance Robot Carhttp://osoyoo.com/2017/05/arduino_car_obstacle_avoidance/
OSOYOO Robot Car Starter Kit Lesson 4: Tracking Robot Carhttp://osoyoo.com/2017/05/tracking-smart-car/
OSOYOO Robot Car Starter Kit Lesson 5: Control Robot Car through Wifi and Bluetoothhttp://osoyoo.com/2017/05/wifi-control-smart-car/
Just an FYI.... these are not my code examples. These were supplied on the enclosed DVD. I have not tested any of them, or have tested that they actually compiled on/with included hardware in this kit....but I will test.....
Have Fun!!!!!



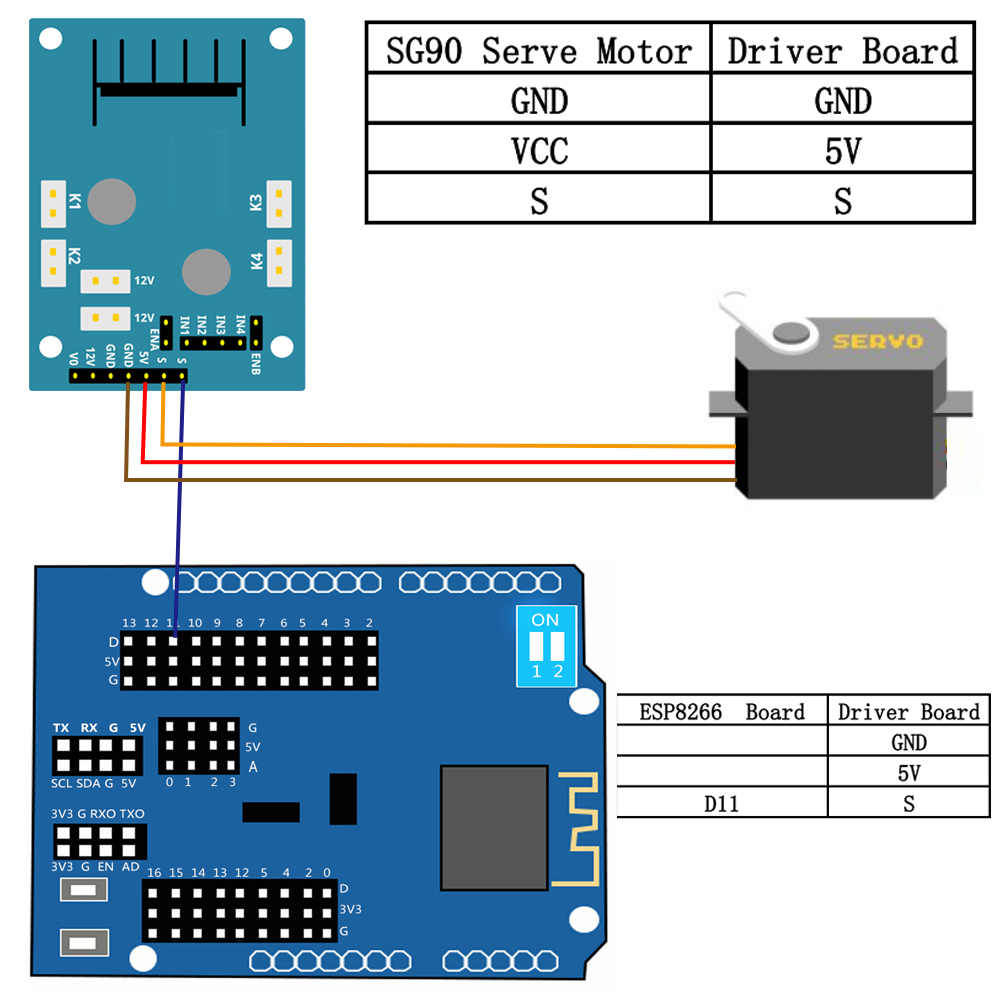
#include <Servo.h>
#define SERVO_PIN 11 //servo connect to D11
Servo myservo;
void setup() {
myservo.attach(SERVO_PIN); //
myservo.write(90); //turn to middle posiztion
}
void loop() {
}
#include <Servo.h>
#include <IRremote.h>
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
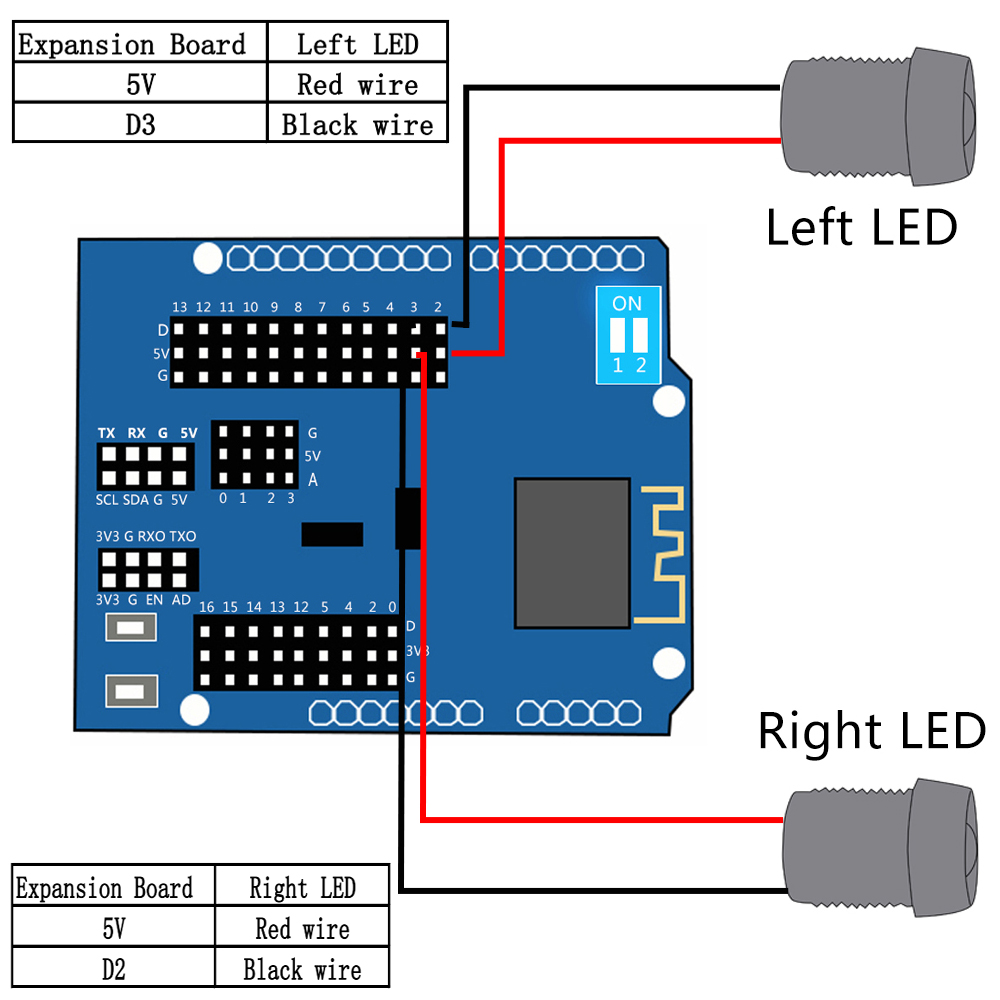
#define LED1 2 //lefe led connect to D2
#define LED2 3 //right led connect to D3
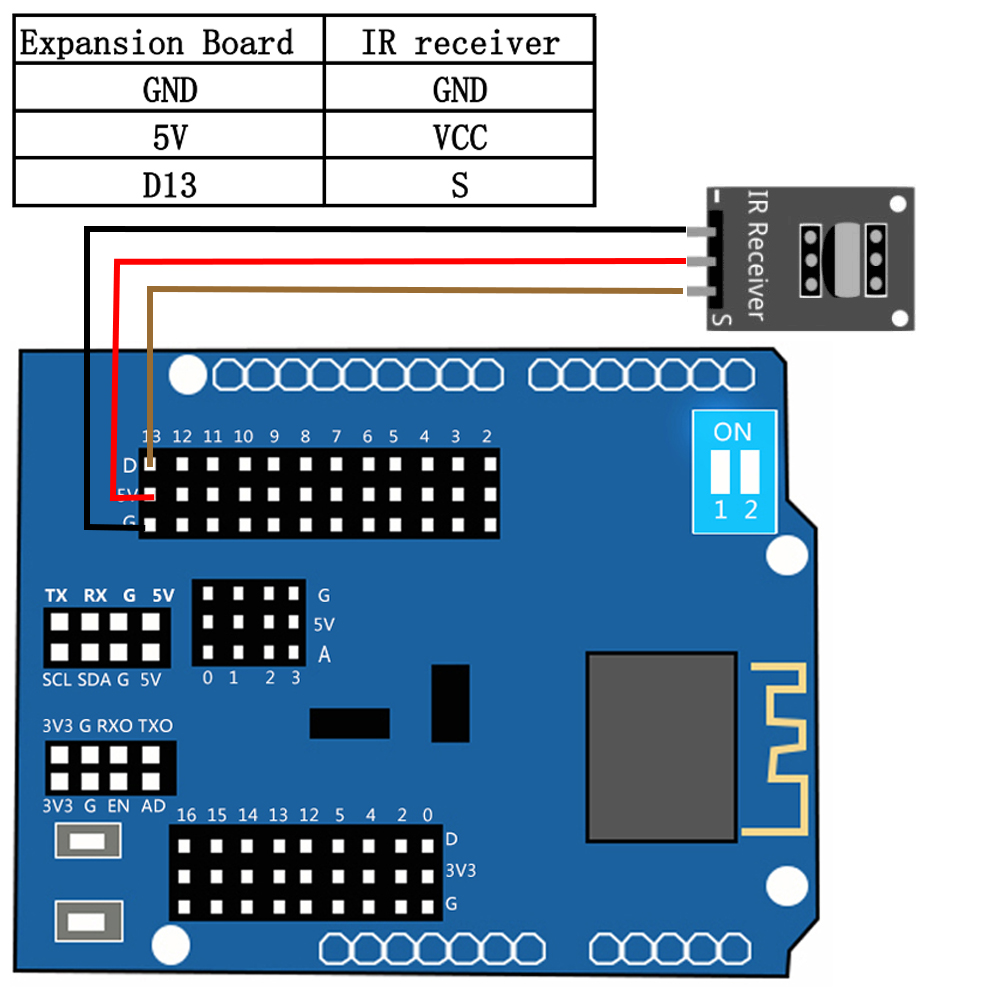
#define IRPIN 13 //IR receiver Signal pin connect to Arduino pin 13
#define LFSensor_1 A0 //line follow sensor1
#define LFSensor_2 A1 //line follow sensor2
#define SERVO 11 //servo connect to D11
#define echo A3 // Ultrasonic Echo pin connect to A2
#define trig A2 // Ultrasonic Trig pin connect to A3
#define buzzer 7 //buzzer connect to D7
Servo head; // create servo object to control a servo
IRrecv IR(IRPIN); // IRrecv object IR get code from IR remoter
decode_results IRresults;
String inputString = "";//Store serial data
boolean stringComplete = false; // whether the string is complete
int pos = 0;
void setup() {
/******LED******/
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
digitalWrite(LED1,HIGH);
digitalWrite(LED2,HIGH);
/*line follow sensors */
pinMode(LFSensor_1,INPUT);
pinMode(LFSensor_2,INPUT);
/*servo*/
head.attach(SERVO);
head.write(90);
/*init HC-SR04*/
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
digitalWrite(trig, LOW);
/*buzzer*/
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, HIGH);//close buzzer
/*IR sensor*/
pinMode(IRPIN, INPUT);
digitalWrite(IRPIN, HIGH);
IR.enableIRIn();
/******L298N******/
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
Serial.begin(9600);
Serial.println("welcome to use tank robot car...");
Serial.println("send <line follow/>:test line follow sensor");
Serial.println("send <led on/>:turn on LED ");
Serial.println("send <led off/>:turn off LED ");
Serial.println("send <servo/>: test servo");
Serial.println("send <distance/>: test HC-SR04");
Serial.println("send <buzzer/>: test buzzer");
Serial.println("send <go/>: test robot go ahead");
Serial.println("send <back/>: test robot go back");
Serial.println("send <stop/>: test robot stop");
Serial.println("--------------------------------------------------->>");
}
/*receive serial data*/
void read_serial()
{
if (Serial.available()>0) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the inputString:
inputString += inChar;
// if the incoming character is a newline, set a flag
// so the main loop can do something about it:
if (inChar == '/') {
stringComplete = true;
}
}
}
void loop() {
read_serial();
if(stringComplete){
if(inputString =="line follow/") read_sensor_values();
else if(inputString =="led on/") led_on();
else if(inputString =="led off/") led_off();
else if(inputString =="servo/") test_servo();
else if(inputString == "distance/") test_hc_sr04();
else if(inputString == "buzzer/") test_buzzer();
else if(inputString == "go/") go_ahead();
else if(inputString == "back/") go_back();
else if(inputString == "stop/") go_stop();
inputString = "";
stringComplete = false;
}
test_ir();//test IR receiver
}
/*read line folloe sensors*/
void read_sensor_values()
{
char sensor[2];
sensor[0]=digitalRead(LFSensor_1);
sensor[1]=digitalRead(LFSensor_2);
if(sensor[0]==1 && sensor[1]== 0)
Serial.println("left sensor is on the black line,right sensor is not on the black line");
if(sensor[0]==0 && sensor[1]== 1)
Serial.println("left sensor is not on the black line,right sensor is on the black line");
if(sensor[0]==1 && sensor[1]== 1)
Serial.println("all sensons are on the black line");
if(sensor[0]==0 && sensor[1]== 0)
Serial.println("all sensons are not on the black line");
}
/*test led*/
void led_on()
{
//turn on led
digitalWrite(LED1,LOW);
digitalWrite(LED2,LOW);
Serial.println("turn on led");
}
void led_off()
{
digitalWrite(LED1,HIGH);
digitalWrite(LED2,HIGH);
Serial.println("turn off led");
}
/*tets servo*/
void test_servo()
{
Serial.println("servo is ok!");
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
head.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
head.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
head.write(90);//go to centre position
}
/*tets HC-SR04*/
void test_hc_sr04()
{
long howfar;
digitalWrite(trig, LOW);
delayMicroseconds(5);
digitalWrite(trig, HIGH);
delayMicroseconds(15);
digitalWrite(trig, LOW);
howfar = pulseIn(echo, HIGH);
howfar = howfar * 0.01657; //how far away is the object in cm
Serial.print("distance:");
Serial.print(howfar);
Serial.println(" cm");
}
/*tets buzzer*/
void test_buzzer()
{
digitalWrite(buzzer, LOW);//turn on buzzer
delay(300);
digitalWrite(buzzer, HIGH);//turn off buzzer
Serial.println("buzzer is ok!");
}
/*robot go ahead*/
void go_ahead()
{
//set motor spped
analogWrite(ENA,255);
analogWrite(ENB,255);
//motor go ahead
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
/*robot go back*/
void go_back()
{
//set motor spped
analogWrite(ENA,255);
analogWrite(ENB,255);
//motor go back
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
/*robot stop*/
void go_stop()
{
//change the speed to 0 to stop the motor
analogWrite(ENA,0);
analogWrite(ENB,0);
}
/*test IR receiver*/
void test_ir()
{
if(IR.decode(&IRresults))
{
Serial.println(IRresults.value, HEX);
IR.resume();
}
}
//Define L298N Dual H-Bridge Motor Controller Pins
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 //needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 //needs to be a PWM pin to be able to control motor speed ENB
/*motor control*/
void go_ahead() //motor rotate clockwise -->robot go ahead
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
}
void go_back() //motor rotate counterclockwise -->robot go back
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
}
void go_stop() //motor brake -->robot stop
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_left() //left motor rotate counterclockwise and right motor rotate clockwise -->robot turn left
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void turn_right() //left motor rotate clockwise and right motor rotate counterclockwise -->robot turn right
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
/*set motor speed */
void set_motorspeed(int lspeed,int rspeed) //change motor speed
{
analogWrite(ENA,lspeed);//lspeed:0-255
analogWrite(ENB,rspeed);//rspeed:0-255
}
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
set_motorspeed(255,255);//maximum speed
go_ahead(),delay(5000),go_stop();//robot forward 5s
go_back(),delay(5000),go_stop();//robot go back 5s
turn_left(),delay(5000),go_stop();//robot turn left 5s
turn_right(),delay(5000),go_stop();//robot turn right 5s
go_stop();//stop
}
void loop() {
}
#include <IRremote.h>
#include <Servo.h>
/******************Define L298N Dual H-Bridge Motor Controller Pins******************/
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
#define SERVO 11 //servo(SG90) connect to D11
#define LED1 2 //lefe led connect to D2
#define LED2 3 //right led connect to D3
#define IRPIN 13 //IR receiver Signal pin connect to Arduino pin 13
#define BUZZER 7 //buzzer connect D7
#define IR_ADVANCE 0x00FF18E7 //code from IR controller "" button
#define IR_BACK 0x00FF4AB5 //code from IR controller "" button
#define IR_RIGHT 0x00FF5AA5 //code from IR controller ">" button
#define IR_LEFT 0x00FF10EF //code from IR controller "<" button
#define IR_SERVO 0x00FF38C7 //code from IR controller "OK" button
#define IR_OPENLED 0x00FFB04F //code from IR controller "#" button
#define IR_CLOSELED 0x00FF6897 //code from IR controller "*" button
#define IR_BEEP 0x00FF9867 //code from IR controller "0" button
enum DN
{
GO_ADVANCE, //go ahead
GO_LEFT, //left turn
GO_RIGHT,//right turn
GO_BACK,//go back
MOVE_SERVO,//move servo
OPEN_LED,//open led
CLOSE_LED,//close led
BEEP,//control buzzer
DEF
}Drive_Num=DEF;
Servo head;
IRrecv IR(IRPIN); // IRrecv object IR get code from IR remoter
decode_results IRresults;
bool stopFlag = true;//set stop flag
bool JogFlag = false;
uint16_t JogTimeCnt = 0;
uint32_t JogTime=0;
/*motor control*/
void go_ahead(int t)//go ahead
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
delay(t);
}
void go_back(int t) //go back
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
delay(t);
}
void go_stop() //stop
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_left(int t)//turn left
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(t);
}
void turn_right(int t)//turn right
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(t);
}
/*set motor speed */
void set_motorspeed(int lspeed,int rspeed)
{
analogWrite(ENA,lspeed);
analogWrite(ENB,rspeed);
}
/*******control led*******/
void open_led(int led_num)
{
if (led_num == 1) digitalWrite(LED1,LOW);
else digitalWrite(LED2,LOW);
}
void close_led(int led_num)
{
if (led_num == 1) digitalWrite(LED1,HIGH);
else digitalWrite(LED2,HIGH);
}
/*******control buzzer*******/
void control_beep()
{
digitalWrite(BUZZER,LOW),delay(100);
digitalWrite(BUZZER,HIGH),delay(100);
}
/***move servo***/
void move_servo()
{
int i;
for(i = 0;i<180;i++){
head.write(i);
delay(5);
}
for(i = 180;i>=0;i--){
head.write(i);
delay(5);
}
head.write(90);
}
/**************detect IR code***************/
void do_IR_Tick()
{
if(IR.decode(&IRresults))
{
if(IRresults.value==IR_ADVANCE)
{
Drive_Num=GO_ADVANCE;
}
else if(IRresults.value==IR_RIGHT)
{
Drive_Num=GO_RIGHT;
}
else if(IRresults.value==IR_LEFT)
{
Drive_Num=GO_LEFT;
}
else if(IRresults.value==IR_BACK)
{
Drive_Num=GO_BACK;
}
else if(IRresults.value==IR_SERVO)
{
Drive_Num=MOVE_SERVO;
}
else if(IRresults.value==IR_OPENLED)
{
Drive_Num=OPEN_LED;
}
else if(IRresults.value==IR_CLOSELED)
{
Drive_Num=CLOSE_LED;
}
else if(IRresults.value==IR_BEEP)
{
Drive_Num=BEEP;
}
IRresults.value = 0;
IR.resume();
}
}
/**************car control**************/
void do_Drive_Tick()
{
switch (Drive_Num)
{
case GO_ADVANCE:
go_ahead(10);JogFlag = true;JogTimeCnt = 1;JogTime=millis();break;//if GO_ADVANCE code is detected, then go advance
case GO_LEFT:
turn_left(10);JogFlag = true;JogTimeCnt = 1;JogTime=millis();break;//if GO_LEFT code is detected, then turn left
case GO_RIGHT:
turn_right(10);JogFlag = true;JogTimeCnt = 1;JogTime=millis();break;//if GO_RIGHT code is detected, then turn right
case GO_BACK:
go_back(10);JogFlag = true;JogTimeCnt = 1;JogTime=millis();break;//if GO_BACK code is detected, then backward
case MOVE_SERVO:
move_servo();JogFlag = true;JogTimeCnt = 1;JogTime=millis();break;//move servo
case OPEN_LED:
open_led(1),open_led(2);JogTime = 0;break;//open led
case CLOSE_LED:
close_led(1),close_led(2);JogTime = 0;break;//close led
case BEEP:
control_beep();JogTime = 0;break;//control beep
default:break;
}
Drive_Num=DEF;
//keep current moving mode for 200 millis seconds
if(millis()-JogTime>=200)
{
JogTime=millis();
if(JogFlag == true)
{
stopFlag = false;
if(JogTimeCnt <= 0)
{
JogFlag = false; stopFlag = true;
}
JogTimeCnt--;
}
if(stopFlag == true)
{
JogTimeCnt=0;
go_stop();
}
}
}
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(BUZZER, OUTPUT);
head.attach(SERVO);
close_led(1),close_led(2);//close led
digitalWrite(BUZZER,HIGH);//close buzzer
pinMode(IRPIN, INPUT);
digitalWrite(IRPIN, HIGH);
IR.enableIRIn();
set_motorspeed(160,160);
go_stop();
}
void loop() {
do_IR_Tick();
do_Drive_Tick();
}
#include <IRremote.h>
//Define L298N Dual H-Bridge Motor Controller Pins
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
#define LED1 2 //lefe led connect to D2
#define LED2 3 //right led connect to D3
#define IRPIN 13 //IR receiver Signal pin connect to Arduino pin 13
#define LFSensor_1 A0 //line follow sensor1
#define LFSensor_2 A1 //line follow sensor2
#define IR_LINEFOLLOW 0x00FF38C7 //code from IR controller "OK" button
#define IR_STOP 0x00FF9867 //code from IR controller "0" button
enum DN
{
START_LINEFOLLOW,//start line follow
STOP_LINEFOLLOW,//stop line follow
DEF
}Drive_Num=DEF;
IRrecv IR(IRPIN); // IRrecv object IR get code from IR remoter
decode_results IRresults;
#define M_SPEED1 200 //motor speed
#define M_SPEED2 255 //motor speed
char sensor[2]={0,0};
/*motor control*/
void go_ahead()//go ahead
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
//delay(t);
}
void go_back() //go back
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
//delay(t);
}
void go_stop() //stop
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_left(int t)//turn left
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(t);
}
void turn_right(int t)//turn right
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(t);
}
/*set motor speed */
void set_motorspeed(int lspeed,int rspeed)
{
analogWrite(ENA,lspeed);
analogWrite(ENB,rspeed);
}
/*read line folloe sensors*/
void read_sensor_values()
{
sensor[0]=digitalRead(LFSensor_1);
sensor[1]=digitalRead(LFSensor_2);
}
/*******control led*******/
void open_led(int led_num)
{
if (led_num == 1) digitalWrite(LED1,LOW);
else digitalWrite(LED2,LOW);
}
void close_led(char led_num)
{
if (led_num == 1) digitalWrite(LED1,HIGH);
else digitalWrite(LED2,HIGH);
}
/**************detect IR code***************/
void do_IR_Tick()
{
if(IR.decode(&IRresults))
{
if(IRresults.value==IR_LINEFOLLOW)
{
Drive_Num=START_LINEFOLLOW;
}
else if(IRresults.value==IR_STOP)
{
Drive_Num=STOP_LINEFOLLOW;
}
IRresults.value = 0;
IR.resume();
}
}
void auto_tarcking(){
read_sensor_values();
if((sensor[0]==LOW)&&(sensor[1]==HIGH)){ //The right sensor is on the black line.The left sensor is on the white line
set_motorspeed(M_SPEED1,M_SPEED1);
turn_right(250);
}
else if((sensor[0]==HIGH)&&(sensor[1]==LOW)){//The right sensor is on the white line.The left sensor is on the black line
set_motorspeed(M_SPEED1,M_SPEED1);
turn_left(250);
}
else if((sensor[0]==LOW)&&(sensor[1]==LOW)){//The left an right sensor are on the white line.
set_motorspeed(M_SPEED2,M_SPEED2);
go_ahead();
}
else if((sensor[0]==HIGH)&&(sensor[1]==HIGH)){//The left an right sensor are on the black line.
go_stop();
}
}
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
/*line follow sensors */
pinMode(LFSensor_1,INPUT);
pinMode(LFSensor_2,INPUT);
close_led(1),close_led(2);//close led
pinMode(IRPIN, INPUT);
digitalWrite(IRPIN, HIGH);
IR.enableIRIn();
go_stop();
}
void loop() {
do_IR_Tick();
if(Drive_Num == START_LINEFOLLOW)
auto_tarcking();
else if(Drive_Num == STOP_LINEFOLLOW)
go_stop();
}
#include <Servo.h>
#include <IRremote.h>
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
#define LED1 2 //lefe led connect to D2
#define LED2 3 //right led connect to D3
#define SERVO 11 //servo connect to D11
#define IRPIN 13 //IR receiver Signal pin connect to Arduino pin 13
#define echo A3 // Ultrasonic Echo pin connect to A2
#define trig A2 // Ultrasonic Trig pin connect to A3
#define buzzer 7 //buzzer connect to D7
#define RSPEED 255 //right motor speed
#define LSPEED 255 //left motor speed
#define IR_AVOIDANCE 0x00FF38C7 //code from IR controller "OK" button
#define IR_STOP 0x00FF9867 //code from IR controller "0" button
enum DN
{
START_AVOIDANCE,//start avoidance
STOP_AVOIDANCE,//stop avoidance
DEF
}Drive_Num=DEF;
int leftscanval, centerscanval, rightscanval, ldiagonalscanval, rdiagonalscanval;
const int distancelimit = 30; //distance limit for obstacles in front
const int sidedistancelimit = 18; //minimum distance in cm to obstacles at both sides (the car will allow a shorter distance sideways)
Servo head;
IRrecv IR(IRPIN); // IRrecv object IR get code from IR remoter
decode_results IRresults;
/*motor control*/
void go_ahead()//go ahead
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
//delay(t);
}
void go_back() //go back
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
//delay(t);
}
void go_stop() //stop
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_left()//turn left
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
//delay(t);
}
void turn_right()//turn right
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
//delay(t);
}
/*set motor speed */
void set_motorspeed(int lspeed,int rspeed)
{
analogWrite(ENA,lspeed);
analogWrite(ENB,rspeed);
}
void buzz_on() //open buzzer
{
digitalWrite(buzzer, LOW);
}
void buzz_off() //close buzzer
{
digitalWrite(buzzer, HIGH);
}
void alarm() {
buzz_on();
delay(100);
buzz_off();
}
/*******control led*******/
void open_led(int led_num)
{
if (led_num == 1) digitalWrite(LED1,LOW);
else digitalWrite(LED2,LOW);
}
void close_led(char led_num)
{
if (led_num == 1) digitalWrite(LED1,HIGH);
else digitalWrite(LED2,HIGH);
}
/*detection of ultrasonic distance*/
int watch() {
long howfar;
digitalWrite(trig, LOW);
delayMicroseconds(5);
digitalWrite(trig, HIGH);
delayMicroseconds(15);
digitalWrite(trig, LOW);
howfar = pulseIn(echo, HIGH);
howfar = howfar * 0.01657; //how far away is the object in cm
Serial.println((int)howfar);
return round(howfar);
}
/**************detect IR code***************/
void do_IR_Tick()
{
if(IR.decode(&IRresults))
{
if(IRresults.value==IR_AVOIDANCE)
{
Drive_Num=START_AVOIDANCE;
}
else if(IRresults.value==IR_STOP)
{
Drive_Num=STOP_AVOIDANCE;
}
IRresults.value = 0;
IR.resume();
}
}
void auto_avoidance() {
head.write(90);
delay(100);
centerscanval = watch();
if (centerscanval >= distancelimit) {
set_motorspeed(LSPEED, RSPEED);
go_ahead();
}
else {
go_stop();
alarm();
head.write(120);
delay(150);
ldiagonalscanval = watch();
head.write(180);
delay(150);
leftscanval = watch();
head.write(90);
delay(150);
head.write(60);
delay(150);
rdiagonalscanval = watch();
head.write(0);
delay(150);
rightscanval = watch();
head.write(90);
if (ldiagonalscanval >= sidedistancelimit && leftscanval >= sidedistancelimit) {
set_motorspeed(LSPEED, RSPEED);
go_back();
delay(200);
turn_left();
delay(600);
}
else if (rdiagonalscanval >= sidedistancelimit && rightscanval >= sidedistancelimit) {
set_motorspeed(LSPEED, RSPEED);
go_back();
delay(200);
turn_right();
delay(600);
}
}
}
void setup() {
/****L298N****/
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
/****LED****/
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
close_led(1),close_led(2);//close led
/*init HC-SR04*/
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
digitalWrite(trig, LOW);
/*init buzzer*/
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, HIGH);
buzz_off();
/*init servo*/
head.attach(SERVO);
head.write(90);
pinMode(IRPIN, INPUT);
digitalWrite(IRPIN, HIGH);
IR.enableIRIn();
/*baud rate*/
Serial.begin(9600);
go_stop();
}
void loop() {
do_IR_Tick();
if(Drive_Num == START_AVOIDANCE)//remote controller press "OK",robot will avoid obstacles
auto_avoidance();
else if(Drive_Num == STOP_AVOIDANCE)//remote controller press "0",robot will stop move
go_stop();
}
#include <Servo.h>
#include "config.h"
Servo head;
void setup() {
/******L298N******/
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
/******LED******/
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
close_led(1),close_led(2);//close led
/*line follow sensors */
pinMode(LFSensor_1,INPUT);
pinMode(LFSensor_2,INPUT);
/*init HC-SR04*/
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
digitalWrite(trig, LOW);
/*init buzzer*/
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, HIGH);
buzz_off();
/*init servo*/
head.attach(SERVO);
head.write(90);
Serial.begin(9600);
go_stop();
}
//WiFi / Bluetooth through the serial control
void do_Uart_Tick()
{
char Uart_Date=0;
if(Serial.available())
{
size_t len = Serial.available();
uint8_t sbuf[len + 1];
sbuf[len] = 0x00;
Serial.readBytes(sbuf, len);
//parseUartPackage((char*)sbuf);
memcpy(buffUART + buffUARTIndex, sbuf, len);//ensure that the serial port can read the entire frame of data
buffUARTIndex += len;
preUARTTick = millis();
if(buffUARTIndex >= MAX_PACKETSIZE - 1)
{
buffUARTIndex = MAX_PACKETSIZE - 2;
preUARTTick = preUARTTick - 200;
}
}
if(buffUARTIndex > 0 && (millis() - preUARTTick >= 100))//APP send flag to modify the obstacle avoidance parameters
{ //data ready
buffUART[buffUARTIndex] = 0x00;
if(buffUART[0]=='C')
{
Serial.println(buffUART);
Serial.println("You have modified the parameters!");//indicates that the obstacle avoidance distance parameter has been modified
sscanf(buffUART,"CMD%d,%d,%d",&distancelimit,&sidedistancelimit,&turntime);
// Serial.println(distancelimit);
// Serial.println(sidedistancelimit);
// Serial.println(turntime);
}
else Uart_Date=buffUART[0];
buffUARTIndex = 0;
}
/*
if(Serial.available()>0)
{
char temp[32];
memset(temp,0x00,32);
size_t len=Serial.available();
if(len<32) Serial.readBytes(temp,len);
if(temp[0]=='C') {
Serial.println(temp);
Serial.println("You have modified the parameters!");
sscanf(temp,"CMD%d,%d,%d",&distancelimit,&sidedistancelimit,&turntime);
}
else if(len<=1&&temp!=NULL) Uart_Date=temp[0];
*/
switch (Uart_Date) //serial control instructions
{
case '2':
Drive_Status=MANUAL_DRIVE; Drive_Num=GO_ADVANCE;Serial.println("forward"); break;
case '4':
Drive_Status=MANUAL_DRIVE; Drive_Num=GO_LEFT; Serial.println("turn left");break;
case '6':
Drive_Status=MANUAL_DRIVE; Drive_Num=GO_RIGHT; Serial.println("turn right");break;
case '8':
Drive_Status=MANUAL_DRIVE; Drive_Num=GO_BACK; Serial.println("go back");break;
case '5':
Drive_Status=MANUAL_DRIVE; Drive_Num=STOP_STOP;buzz_off();Serial.println("stop");break;
case '3':
Drive_Status=AUTO_DRIVE_UO; Serial.println("avoid obstacles...");break;
case '1':
Drive_Status=AUTO_DRIVE_LF; Serial.println("line follow...");break;
default:break;
}
}
//robot motor control
void do_Drive_Tick()
{
if(Drive_Status == MANUAL_DRIVE)
{
switch (Drive_Num)
{
case GO_ADVANCE:
set_motorspeed(255,255);
go_ahead(300);
JogFlag = true;
JogTimeCnt = 1;
JogTime=millis();
break;
case GO_LEFT:
set_motorspeed(255,255);
turn_left(100);
JogFlag = true;
JogTimeCnt = 1;
JogTime=millis();
break;
case GO_RIGHT:
set_motorspeed(255,255);
turn_right(100);
JogFlag = true;
JogTimeCnt = 1;
JogTime=millis();
break;
case GO_BACK:
set_motorspeed(255,255);
go_back(300);
JogFlag = true;
JogTimeCnt = 1;
JogTime=millis();
break;
case STOP_STOP:
go_stop();
JogTime = 0;
break;
default:
break;
}
Drive_Num=DEF;
//keep the car running for 200ms
if(millis()-JogTime>=200)
{
JogTime=millis();
if(JogFlag == true)
{
stopFlag = false;
if(JogTimeCnt <= 0)
{
JogFlag = false; stopFlag = true;
}
JogTimeCnt--;
}
if(stopFlag == true)
{
JogTimeCnt=0;
go_stop();
}
}
}
else if(Drive_Status==AUTO_DRIVE_LF)
{
auto_tarcking();
}
else if(Drive_Status==AUTO_DRIVE_UO)
{
auto_avoidance();
}
}
void loop() {
do_Uart_Tick();
do_Drive_Tick();
}
#define IN1 8 //K1K2 motor direction
#define IN2 9 //K1K2 motor direction
#define IN3 10 //K3K4 motor direction
#define IN4 12 //K3K4 motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
#define LED1 2 //lefe led connect to D2
#define LED2 3 //right led connect to D3
//#define IRPIN 13 //IR receiver Signal pin connect to Arduino pin 13
#define LFSensor_1 A0 //line follow sensor1
#define LFSensor_2 A1 //line follow sensor2
#define SERVO 11 //servo connect to D11
#define echo A3 // Ultrasonic Echo pin connect to A2
#define trig A2 // Ultrasonic Trig pin connect to A3
#define buzzer 7 //buzzer connect to D7
char sensor[2]={0,0};
#define MAX_PACKETSIZE 32 //Serial receive buffer
char buffUART[MAX_PACKETSIZE];
unsigned int buffUARTIndex = 0;
unsigned long preUARTTick = 0;
int leftscanval, centerscanval, rightscanval, ldiagonalscanval, rdiagonalscanval;
const int distancelimit = 30; //distance limit for obstacles in front
const int sidedistancelimit = 18; //minimum distance in cm to obstacles at both sides (the car will allow a shorter distance sideways)
const int turntime = 700; //Time the robot spends turning (miliseconds)
bool stopFlag = true;
bool JogFlag = false;
uint16_t JogTimeCnt = 0;
uint32_t JogTime=0;
enum DS
{
MANUAL_DRIVE,
AUTO_DRIVE_LF, //line follow
AUTO_DRIVE_UO //ultrasonic obstruction
}Drive_Status=MANUAL_DRIVE;
enum DN
{
GO_ADVANCE,
GO_LEFT,
GO_RIGHT,
GO_BACK,
STOP_STOP,
DEF
}Drive_Num=DEF;
/*motor control*/
void go_ahead(int t)//go ahead
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
delay(t);
}
void go_back(int t) //go back
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
delay(t);
}
void go_stop() //stop
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_left(int t)//turn left
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(t);
}
void turn_right(int t)//turn right
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(t);
}
/*set motor speed */
void set_motorspeed(int lspeed,int rspeed)
{
analogWrite(ENA,lspeed);
analogWrite(ENB,rspeed);
}
void buzz_on() //open buzzer
{
digitalWrite(buzzer, LOW);
}
void buzz_off() //close buzzer
{
digitalWrite(buzzer, HIGH);
}
void alarm() {
buzz_on();
delay(100);
buzz_off();
}
/*******control led*******/
void open_led(int led_num)
{
if (led_num == 1) digitalWrite(LED1,LOW);
else digitalWrite(LED2,LOW);
}
void close_led(char led_num)
{
if (led_num == 1) digitalWrite(LED1,HIGH);
else digitalWrite(LED2,HIGH);
}
/******detection of ultrasonic distance******/
int watch() {
long howfar;
digitalWrite(trig, LOW);
delayMicroseconds(5);
digitalWrite(trig, HIGH);
delayMicroseconds(15);
digitalWrite(trig, LOW);
howfar = pulseIn(echo, HIGH);
howfar = howfar * 0.01657; //how far away is the object in cm
Serial.println((int)howfar);
return round(howfar);
}
/******auto avoid obstacles******/
void auto_avoidance() {
head.write(90);
delay(100);
centerscanval = watch();
if (centerscanval >= distancelimit) {
set_motorspeed(255, 255);
go_ahead(0);
}
else {
go_stop();
alarm();
head.write(120);
delay(150);
ldiagonalscanval = watch();
head.write(180);
delay(150);
leftscanval = watch();
head.write(90);
delay(150);
head.write(60);
delay(150);
rdiagonalscanval = watch();
head.write(0);
delay(150);
rightscanval = watch();
head.write(90);
if (ldiagonalscanval >= sidedistancelimit && leftscanval >= sidedistancelimit) {
set_motorspeed(255, 255);
go_back(200);
turn_left(600);
}
else if (rdiagonalscanval >= sidedistancelimit && rightscanval >= sidedistancelimit) {
set_motorspeed(255, 255);
go_back(200);
turn_right(600);
}
}
}
/*read line folloe sensors*/
void read_sensor_values()
{
sensor[0]=digitalRead(LFSensor_1);
sensor[1]=digitalRead(LFSensor_2);
}
/*********auto line follow*********/
void auto_tarcking(){
read_sensor_values();
if((sensor[0]==LOW)&&(sensor[1]==HIGH)){ //The right sensor is on the black line.The left sensor is on the white line
set_motorspeed(200,200);
turn_right(250);
}
else if((sensor[0]==HIGH)&&(sensor[1]==LOW)){//The right sensor is on the white line.The left sensor is on the black line
set_motorspeed(200,200);
turn_left(250);
}
else if((sensor[0]==LOW)&&(sensor[1]==LOW)){//The left an right sensor are on the white line.
set_motorspeed(255,255);
go_ahead(0);
}
else if((sensor[0]==HIGH)&&(sensor[1]==HIGH)){//The left an right sensor are on the black line.
go_stop();
}
}
#include <PinChangeInt.h> //
#include <MsTimer2.h> //
#include <DATASCOPE.h> //PC
//The sample code for driving one way motor encoder
const byte encoder0pinA = 2;//A pin -> the interrupt pin 0
const byte encoder0pinB = 4;//B pin -> the digital pin 4
const byte rencodPinA = 3; //rencodPinA -> the interrupt pin 1
const byte rencodPinB = 7; //rencodPinB -> the digital pin 11
#define IN1 8 //left motor direction
#define IN2 9 //left motor direction
#define IN3 10 //right motor direction
#define IN4 12 //right motor direction
#define ENA 5 // Needs to be a PWM pin to be able to control motor speed ENA
#define ENB 6 // Needs to be a PWM pin to be able to control motor speed ENB
#define motorspeed 200
const float Kp =20;
const float Ki =1;
byte encoder0PinALast,encoder0PinALast1;
int duration,duration1;//the number of the pulses
boolean l_direction,r_direction;//the rotation direction
int master_pulse,slave_pulse;
int pwm;
static int i;
unsigned char Send_Count;
DATASCOPE data;// data
void DataScope(void)
{
int i;
data.DataScope_Get_Channel_Data(-1*master_pulse-slave_pulse, 1);// 40ms
data.DataScope_Get_Channel_Data(0, 2);// 40ms
data.DataScope_Get_Channel_Data(pwm, 3);// 40ms
data.DataScope_Get_Channel_Data(slave_pulse, 4);// 40ms
Send_Count = data.DataScope_Data_Generate(4);
for ( i = 0 ; i < Send_Count; i++)
{
Serial.write(DataScope_OutPut_Buffer[i]);
}
delay(50); //
}
void go_ahead()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
}
void go_back()
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
}
void go_stop()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void setup()
{
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
Serial.begin(128000);//Initialize the serial port
/*encoder init*/
l_direction = true;//default -> Forward
r_direction = true;
pinMode(encoder0pinB,INPUT);
pinMode(rencodPinB,INPUT);
attachInterrupt(0, lwheelSpeed, CHANGE);
attachInterrupt(1, rwheelSpeed, CHANGE);
delay(1500); //
MsTimer2::set(10, control); //Timer210ms
MsTimer2::start(); //
analogWrite(ENA,motorspeed),analogWrite(ENB,motorspeed);
}
int PID_controller(int master,int slave)
{
static float power,error,integralerror,lasterror;
if(master < 0) master = -master;
if(slave < 0) slave = -slave;
error = master - slave;
integralerror += error;
power += Kp *(error-lasterror) + Ki * error;
lasterror = error;
return power;
}
void control()
{
sei();//enable global interrupts
if(++i >=4)//20ms
{
master_pulse = duration ,duration = 0;
slave_pulse = duration1, duration1 = 0;
pwm = PID_controller(master_pulse,slave_pulse);
i = 0;
}
int newpower1 = motorspeed+pwm;
constrain(newpower1,0,255);
analogWrite(ENB,newpower1),analogWrite(ENA,motorspeed);
cli();//disenable global interrupts
}
void loop()
{
go_ahead();
Serial.begin(128000), DataScope(); //128000
}
void lwheelSpeed()
{
int Lstate = digitalRead(encoder0pinA);
if((encoder0PinALast == LOW) && Lstate==HIGH)
{
int val = digitalRead(encoder0pinB);
if(val == LOW && l_direction)
{
l_direction = false; //Reverse
}
else if(val == HIGH && !l_direction)
{
l_direction = true; //Forward
}
}
encoder0PinALast = Lstate;
if(!l_direction) duration++;
else duration--;
}
void rwheelSpeed()
{
int Lstate = digitalRead(rencodPinA);
if((encoder0PinALast1 == LOW) && Lstate==HIGH)
{
int val = digitalRead(rencodPinB);
if(val == LOW && r_direction)
{
r_direction = false; //Reverse
}
else if(val == HIGH && !r_direction)
{
r_direction = true; //Forward
}
}
encoder0PinALast1 = Lstate;
if(!r_direction) duration1++;
else duration1--;
}





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.