


Software apps and online services | ||||||
 |
| |||||
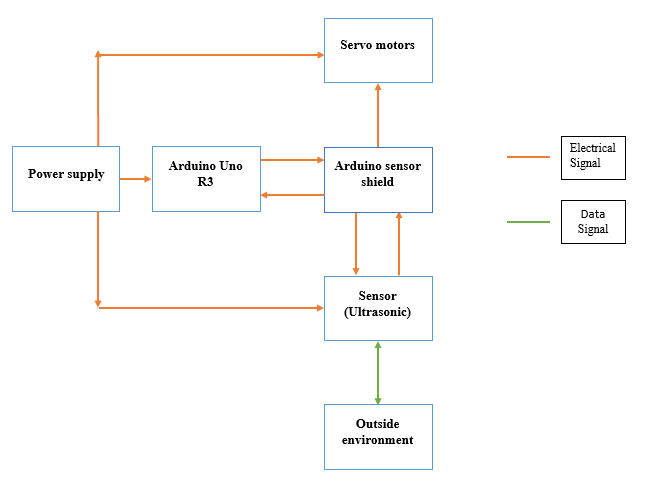
This project aims to create an automatic biped robot with 6 servo motors (MG996R) that work as human begin hips, knee, and ankles. Controlled by Arduino Uno R3 with Arduino sensor shield. In addition to it, the ultrasonic sensors are used to identify the obstacles. Based on the obstacle identification, the biped path can be altered in order to evade impact within obstacle.------------------------------------------------------------------------------------------------------------------------I made this Robot in one month from not knowing anything in Robotics to making this Robot By Designing it and program it. It wasn't easy to make this Robot because you need to spend much time learning it specially with Biped Robot type I couldn't find any suitable code or design most of those people how made it they just publish the videos without any Code or design BUT here I am O_O. I tried my best to make everything easy and clear to anyone who is new to this field.



{kind=link}
Comments
Please log in or sign up to comment.