/*///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
UNIVERSIDADE FEDERAL DE PERNAMBUCO - PHYSICS DEPARTMENT - NANO-OPTICS LABORATORY
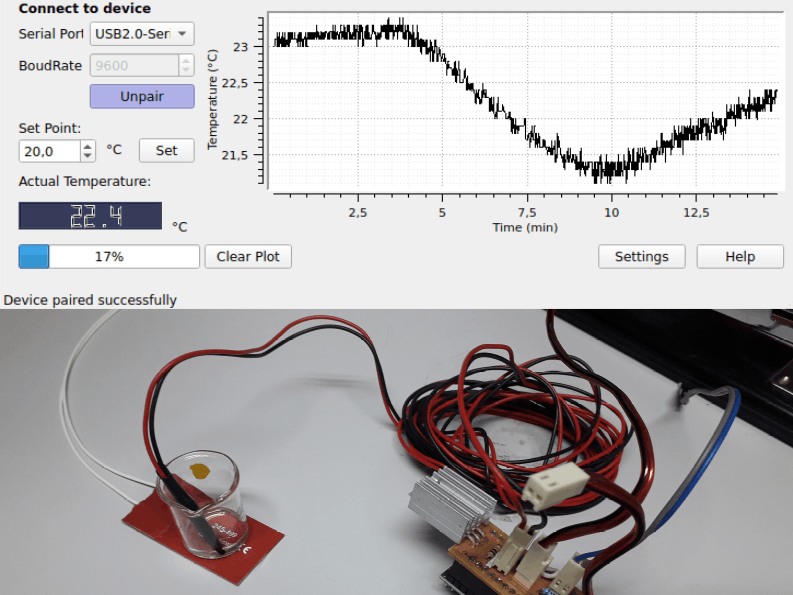
HEATING DEVICE - PID CONTROLLER
Allison Pessoa
Recife, Pernambuco - Brazil
September 2020
allisonpessoa@hotmail.com
This heating device acts to hold at a constant temperature (user-defined setpoint) a thermal blancket by using a PID controller.
A thermistor is used for temperature sensing (input), and a silicone mat for heating (PWM output). The User Interface can receive the temperature data
and/or send the P,I,D,Setpoint parameters using Serial Communication.
Commands:
-> 'SETPT(value)' : Sets the temperature in which the temperature must be held constant.
-> 'UPDSETT(val1,val2,val3)' : Redefines the PID constants. val1 = P; val2 = I, val3 = D
**The User-Interface must avoid invalid values.
Pins Interface:
-> Pin D5 -> Thermal Blancket (Heater) | PWM 0-5V, 980 Hz, Output
-> Pin A1 -> Thermistor | Analog Input (0-5V)
under GNU GPLv3 License
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////*/
#include "thermistor.h"
#include <PID_v1.h>
#ifdef VERBOSE_SENSOR_ENABLED // undefine a macro from thermistor library
#undef VERBOSE_SENSOR_ENABLED // so it do not print other things than the temperature value
#endif
#define NTC_PIN_INPUT A1 //Pin to NTC input
#define PWM_PIN_OUTPUT 5 //Pin to PWM output
THERMISTOR thermistor(NTC_PIN_INPUT, // Analog pin
10000, // Nominal resistance at 25 C
3950, // thermistor's beta coefficient
10000); // Value of the series resistor
// User Interface releated
double control_P = 100;
double control_I = 10;
double control_D = 1;
double setPoint = 20;
double temp; //PID Input
double duty; //PID Output
PID PID_control(&temp, &duty, &setPoint, control_P, control_I, control_D, DIRECT);
// Communication through USB
typedef struct {
String content;
volatile uint32_t value[3]; // three parameters function, maximum
}Command;
Command ReadCommand() {
//Indetifies the command, splits letters and numbers, saves the numbers as arguments
Command aux;
char number[10];
char *eprt;
int ascii;
int i=0, j=0, l=0;
while(Serial.available()>0) {
ascii=Serial.peek();
if(ascii != 13) {//if it is not \enter (CR)
if (ascii > 47 && ascii < 58) {//numbers
delay(10);
do {
number[i]= Serial.read();
ascii = Serial.peek();
i++;
} while (ascii > 47 && ascii < 58);
i=0;
long int var = strtol(number,&eprt,10);
aux.value[j] = var;
for (int k=0; k<10;k++){
number[k]=0;
}
j++;
}
else {//letters
char charac = Serial.read();
if (charac > 96 && charac < 123){
charac -= 32;//only uppercase letters
}
aux.content.concat(charac);
}
}
delay(10);
}
return aux;
}
void setup(){
pinMode(PWM_PIN_OUTPUT, OUTPUT); //PWM Output
Serial.begin(9600);
PID_control.SetMode(AUTOMATIC);
//First measurement
temp = float(thermistor.read())/10;
Serial.print("A");
Serial.println(temp);
}
void loop (){
Command rec;
if (Serial.available()){
rec = ReadCommand();
if (rec.content == "SETPT()"){ //if you whish to control directly throught Serial Monitor, use "SETPT()\n" instead (at least, for Ubuntu users. Arduino 1.8.12).
setPoint = float(rec.value[0])/10; //Receive temperature in x10 C
}
if (rec.content == "UPDSETT(,,)"){//The user interface must avoid invalid values
control_P = rec.value[0];
control_I = rec.value[1];
control_D = rec.value[2];
}
}
for(int i=0; i<10; i++){
temp = float(thermistor.read())/10; //Receive temperature in x10 C
if ((temp - setPoint) < 0.5) { //Setting adaptive tunings
temp = float(thermistor.read())/10;
PID_control.Compute();
analogWrite(PWM_PIN_OUTPUT, duty);//980 Hz (predefined), at this pin
delay(10);
}
else{
digitalWrite(PWM_PIN_OUTPUT, 0);
delay(10);
}
}
Serial.print("A");
Serial.println(temp);
}




Comments
Please log in or sign up to comment.