



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
 |
| |||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
Meeeeeeery Christmas, guys :)
Only a few days for the Christmas and all are preparing their Christmas trees, lights and decoration for a sweet and warm Christmas celebration nights with family and friends.
But if you want to stand out in a crowd by building something new and interactive to amaze your family and friends with then this your right tutorials for building the talking, singing and selfie-taking Santa Claus guy!
Yes, I will walk you through the full steps of how you can build a human-shaped Santa Claus that can automatically:
- Feel whenever someone comes beside him and sings to him
- Asking you to take a selfie with him and post it on Twitter
So, let's get started with the idea...
IdeaYou will simply build a human-size Santa Claus from PVC and fiber with a pretty red Santa Claus wear.
Then, you will make a very simple hardware circuit that has an ultrasonic sensor to detect that people are nearby.
And it sings and talks to them for talking a selfie photo to upload to Twitter.
How it worksYou would place Santa Claus near the house door to surprise your friends and family at the Christmas night.
Once they enter the home, Santa Claus will detect them and plays the "Merry Christmas" song.
It's better to turn lights off since the Christmas tree will toggle its light with the song. Here, Santa Claus will ask them for a sweet selfie and once they say "yeah, sure" he will take a photo with his selfie stick and uploads it to your Twitter account!
I am going to use Arduino with the 1Sheeld. 1Sheeld is basically an Arduino shield that connects to your phone and makes use of the phone sensors and capabilities to deliver you 40+ shields into only one shield!
Just a perfect and cheap board that empowers me to use the required Arduino shields in this project which are:
- Text-to-Speech Shield for making Santa Claus talk!
- Voice-Recognition Shield for making Santa Claus listen to people answer
- Camera Shield for taking selfie photos
- Music Player Shield to play the "merry christmas" song
- Twitter Shield to tweet the captured photo
- Buzzer Shield to notify people that Santa will capture the photo right now
- Terminal Shield for debugging purpose only
So, I will go with you step by step to build this project from scratch..
Before you start building itI recommend you go for the 1Sheeld getting started tutorial to get familiar with 1Sheeld board.
Now, lets start making it
Step 1: Make the Santa Claus from PVCGet 5 meters of PVC tubes and cut them into the skeleton parts with the dimensions of your Santa Claus's clothes. If you didn't get the clothes yet then you can cut the PVC with these dimensions:
And hock all pieces together with joints and the PVC cement and tape so that you build the skeleton as this:
Once you get the skeleton ready you will cover it with the clothes and fill it with fiber. I started with the legs with the help of 2 rounded cardboard pieces to prevent the fiber from going out of the clothes:
You will need any kind of white gloves and a selfie stick.
Start with filling gloves with fiber. Then, just hock both hands to the end of the PVC arms with cable ties.
Left hand will be free but the right one will be tied to the selfie stick so you need to tie the selfie stick to the PVC right arm's end too.
Then you will bring a pair of shoes and insert the PVC legs inside it.
For more stability, I have fixed the end of the PVC leg with some L-shape metal corners along side with 4mm diameter and 50mm long screws and nuts.
Here comes the tricky part where you will shape the head. I have found a tutorial video that makes it with a great simple idea where he used just the cardboard! Check it:
After, you will end up with something like that:
The next step is to make the head support by cutting a curved piece of cardboard and glue it to the head.
Then glue all to the neck (just a short pvc tube)
And here comes the most easy part of the hole project where you just get a mask /face and stick the beard to it.
You are going to make a gap in front of the head to glue the face boarders inside it so that the face gets a bit inside the head and looks more like a human head.
Now, you will make a sweet box for the components. You just need to draw then cut the box faces from a cardboard. Box dimensions are as follows:
Then you will fold the design you have cut and glue the faces together with the glue gun:
I have added some visual polish for the box to look like a box for the Christmas gift :) and it looked cool!
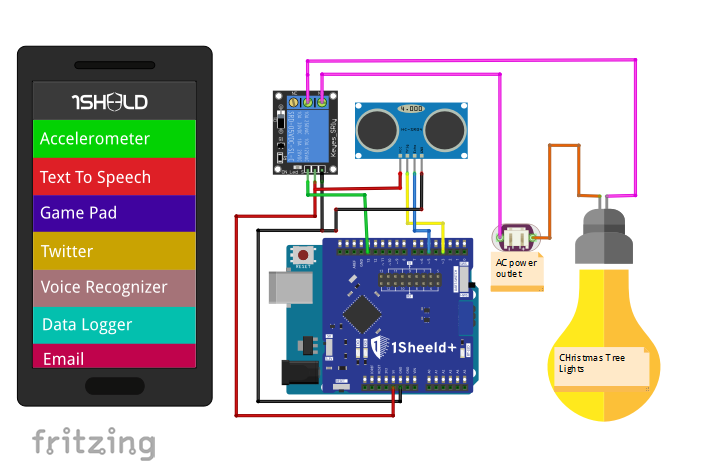
Connect the hardware components as in the schematic part and place the circuit in the box:
- Connect the Arduino via your PC using Arduino USB cable.
- Switch the 1Sheeld power to operate on 5v (Not the 3.3v):
- 1Sheeld has 2 modes: Uploading mode and Operating mode. You can switch between them using the switch close to the Digital pins and is called “UART SWITCH” on 1Sheeld and “SERIAL SWITCH” on 1Sheeld+.
Firstly, you slide the switch towards the “SW” notation which turns the 1Sheeld board into the Uploading mode to let you upload the Arduino code.
Secondly, after you finish uploading the code, slide the switch towards the "HW" which turns the 1Sheeld board into the Operating mode to communicate with your smartphone 1Sheeld app.
Finally, open the 1Sheeld app and connect it to the 1Sheeld board via Bluetooth.
Step 9: Polish Santa ClausIf you like, you can add some Christmas accessories to Santa Claus and the Christmas tree so that the project looks cool. I have also covered the wooden base with the same gift covering papers of the box and I have ended up with this awesome looking Santa:
Plug in the AC power of the tree light and plug the Arduino to a 5V source, maybe a power bank.
after that, open the 1Sheeld app, and select these shields: camera, buzzer, terminal, voice recognizer, text-to-speech, music player, twitter.
Then, download add this "merry christmas" track to the music player list
And change the text-to-speech voice gender to a male voice. If you use Android phone then change the voice by navigating to settings >> system >> languages and input >> text-to-speech output >> preferred engine gear icon >> install voice data >> select English >> select a male voice (voice || or voice ||| or voice |V).
You can also adjust the pitch and speech rate to get the closest voice to a real old man.
And don't forget to log in with your Twitter account in the Twitter shield.
Finally stick the phone to the selfie stick.
And you are ready to make the nights of Christmas!
If you liked, please respect and share. And if you have any comment please let me know...
"Merry Christmas, guys!"


{kind=link}
Comments
Please log in or sign up to comment.