


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
just helping the world to be a better place
amaurotic shoe accessory
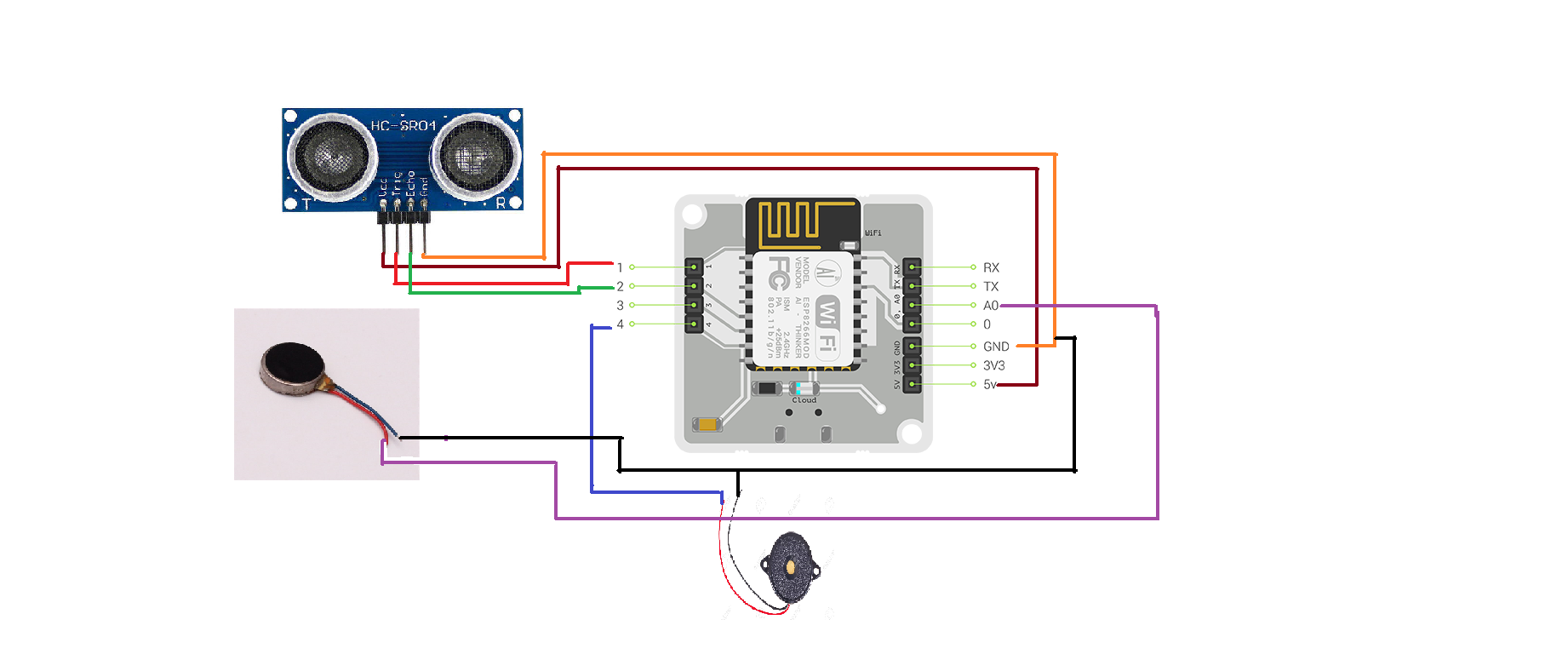
there are totally 4 components used
bolt wifi module
ultrasonic sensor
piezo buzzer
vibrator
the ultrasonice sensor has 4 terminals . namely vcc,trigger, echo and gnd.
vcc is connected to 5v of bolt module
trigger is connected to pin number 1
echo is connected to pin number 2
and gnd is connected to gnd of bolt deevice
coming to piezo buzzer, positive terminal is connected to pin number 4 and negative terminal is connected to ground of bolt module respectively.
since vibrator needs pwm (pulse width modulation, analog results using digital means) posiitve terminal of it is connected to A0 and negative to gnd of bolt respectively.
the logic behind the code is the person with this accessory should get a vibration and a sound buzzer when there is an obstracle within 300 cm from him.
bolt wifi module
ultrasonic sensor
piezo buzzer
vibrator
the ultrasonice sensor has 4 terminals . namely vcc,trigger, echo and gnd.
vcc is connected to 5v of bolt module
trigger is connected to pin number 1
echo is connected to pin number 2
and gnd is connected to gnd of bolt deevice
coming to piezo buzzer, positive terminal is connected to pin number 4 and negative terminal is connected to ground of bolt module respectively.
since vibrator needs pwm (pulse width modulation, analog results using digital means) posiitve terminal of it is connected to A0 and negative to gnd of bolt respectively.
the logic behind the code is the person with this accessory should get a vibration and a sound buzzer when there is an obstracle within 300 cm from him.
{kind=link}

Comments
Please log in or sign up to comment.