



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
| ||||||
The threat of influenza pandemic is likely to be with us for some time, as new viral-strains will continue to emerge and travel quickly through the new global economy. In the absence of vaccines or effective treatments, non-pharmacological interventions such as hygiene, social distancing, and the use of respirators and medical masks must be implemented as secondary means of preventing or slowing down the transmission. Of these, many public health practitioners regard the use of masks to be an intervention of last resort.
With adequate time and planning, stockpiling or ramping up production, or both, would ensure that there would be enough respirators or medical masks for all those who may need them, but with limited resources and time, supplies are likely to be insufficient. Thus, reality may require that disposable N95 respirators and medical masks be pushed beyond their approved uses in the hope that they can offer some level of protection beyond their intended limits of use. Moreover, individuals with no access to respirators or masks, even disposables, may feel driven to invent their own respiratory protection measures;
According to the reports from IMC, Beijing :'The new coronavirus is sensitive to heat. It can be effectively inactivated by heating for 30 minutes at 56 degrees Celsius. Therefore, the single dry heat sterilization (70 degrees Celsius heating for 30 minutes) can effectively inactivate the virus without affecting the protective function(electrostatic absorption efficiency) of the mask'.
Hardware-Details:The Arduino Nano 33 BLE Sense is a completely new board on a well-known form factor. It comes with a series of embedded sensors such as:
1) Microphone to capture and analyse sound in real time
2) 9-axis Inertial Measurement Unit
3) Temperature, Humidity & Barometric sensor for getting highly accurate measurements of the environmental conditions
4) Gesture, Proximity, Color and Intensity sensor
The communications chipset on the Nano 33 BLE Sense can be both a BLE and Bluetooth® client and host device. Something pretty unique in the world of microcontroller platforms, with an added possibility of running Edge Computing applications (AI) on it using TinyML. You can create your machine learning models using TensorFlow™ Lite and upload them to your board using the Arduino IDE.
Salient features of Mask.ME- Measurement of ambient Exhaled Breath Parameters.
- Measurement and comparison of ambient environment parameters.
- Transmitting Temp, Humidity and WearerI.D. through iBeacon protocol for contact-tracing over BLE.
- Deploying real-time cough & sneeze detection ML model build through edge-impulse.
- Active sterilization of the mask through 2x2 twill weave Carbon-fiber mesh heating.
and, a haptic feed-back through embedded vibration-disc based on alerts and event-notifications within the nRF Connect smartphone-app.
Design-It.. on step-basis:While developing on Mask.ME project, several projects and journals have been a continual inspiration, starting from the Technion University's self-cleaning mask, furthered to smart-masks developed by LG,Xiaomi,Innosparksand Dettol-SiTi
Validating the purposeof self sterilization:
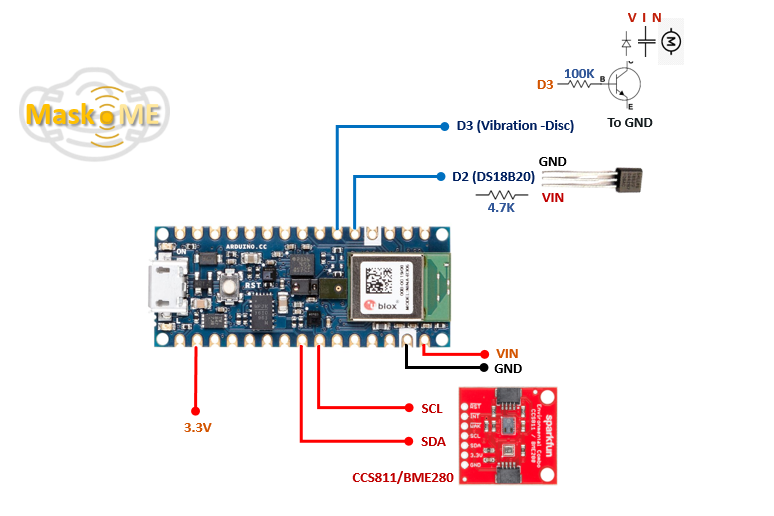
The initial experiments were done utilizing carbon-fiber tape that generated temperatures above 50 degrees celsius, but was found to be inconvenient due to non-consistent thermal propagation, hence-after a 2x2 twill weave CF was used at varying voltages starting from 3V upto 9V, that resulted in temperatures of 62 degrees at 9V/2Amps and 57-58 degrees at 5.1V (RPi adapter). Note: The temperature was measured through DS18B20 sensor in direct contact with the fabric-cutout.
A small USB-A cable is connected to electrodes that are further fused with CF fabric using thermal-paste. The DS18B20 temperature sensor monitors the average temperature of the fabric and reports output in the serial-terminal. Still, more tests need to be done, to prove the efficacy of 2x2 twill weave arrangement as opposed to uni-layer arrangement (used by TU).
Monitoring Vitals On The Go:
Prolonged usage of masks induce significantly different temperature and humidity in the micro-climates of the facemasks, which have profound influences on heart rate and thermal stress and subjective perception of discomfort. In-mask temperature is closely associated with exhaled breath temperature, which is further linked to lung inflammation(as shown in some studies).
This has been addressed through close monitoring of exhaled breath parameters and ambient environment parameters and compared on a practical basis with temperature deviation of (+2) and humidity deviation of (+10) values respectively. This approach utilizes sparkfun CCS811 and BME280 sensor breakout connected to Nano 33 BLE Sense, that all-together measure CO2, TVoCs, T, H within the mask micro-climate and the values from HTS221 on board sensor, that further generates haptic alert to further notify the wearer to take preventive measures. One can also monitor his vitals, by connecting the sensor service over BLE through the nRF Connect App.
This feature has further been developed for minimal contact-tracing of individuals using Bluetooth Low Energy ibeacon protocol, wherein the Major and Minor values are updated with in-mask humidity and temperature along with hard-coded wearer I.D. and calibrated Tx power level, that alltogether can serve to track individuals witihin an enterprise equipped with iBeacon Servers or through DIY RPi iBeacon Scanner.
all he says is- 'God Bless You':
The last part of this project utilizes the machine learning capabilities of Nano 33 BLE Sense through Edge Impulse Studio, a detailed walkthrough has already been provided at :
https://www.hackster.io/edge-impulse/cough-detection-with-tinyml-on-arduino-417f37
Through the use of on-board microphone, the Nano 33 BLE Sense board is trained with 15 samples each of 3 classes(cough, sneeze and noise) data and each has been sampled over a second and trained using 2D Convolution.
Mel-frequency cepstral coefficients (MFCCs) are coefficients that collectively make up an MFC. They are derived from a type of cepstral representation of the audio clip (a nonlinear "spectrum-of-a-spectrum"). The difference between the cepstrum and the mel-frequency cepstrum is that in the MFC, the frequency bands are equally spaced on the mel scale, which approximates the human auditory system's response more closely than the linearly-spaced frequency bands used in the normal cepstrum. This frequency warping can allow for better representation of sound, for example, in audio compression.
MFCC values are not very robust in the presence of additive noise, and so it is common to normalise their values in speech recognition systems to lessen the influence of noise. Some researchers propose modifications to the basic MFCC algorithm to improve robustness, such as by raising the log-mel-amplitudes to a suitable power (around 2 or 3) before taking the DCT (Discrete Cosine Transform), which reduces the influence of low-energy components.










_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments