


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Energy management system comprises of generation, transmission and distribution of power. Efficiency of whole system depends on efficient functioning of each individual stage. For increasing the efficiency of the energy management system and to cope up with the increasing demand of electricity, both technical and non-technical losses need to be minimized.
Whilst, the technical losses are improved upon by the utilities. This project tries to minimize various non-technical losses such as:
a) Tampering with Energy Meter
b) Double-feed and bypass of Energy Meter
c) Ignoring unpaid bills
d) Human-error and delay in meter reading and billing
Anti Tamper feature in Energy Meters is one of the ways to bring down the incidence of energy-theft tampering of meters. Use of Intelligent and smart meters with Anti tamper feature makes electricity theft more difficult and easily detectable.
NOTE: The initial device setup (Azure Sphere MT3620), is indeed a not too-complicated project in itself, hence it wouldn't be summarized here. But still, one can get a detailed info regarding Azure Sphere dry-test by Cabe Atwell's
Project OverviewMeasuring Energy consumption
The project involves the measurement of current consumption based on the output values from ACS758 current sensor, that is tweaked for 2.5V output (default 5V) through resistor-divider circuit, before feeding to the analog pin AN of MT3620 (mikroBUS-1), this is done to compensate for the ADC Voltage reference of MT3620 board. Voltage levels and power-factor have been averaged-out to standard 230V and 0.8 respectively due to minor fluctuations in our energy supply region as well as for the sake of simplicity of the project.
Anti-tamper methodology
As soon as the device registers the 'Tamper-state', it would shutdown the connected output load through load-relay, and log the device details to the azure cloud.
Over-loading and ignoring energy bills for a set duration would also perform load-shutdown and log the specific details to the azure cloud.
Physical abuse to the azure sphere powered smart meter would also trigger output load-shutdown and log the device ID details to the concerned utility for theft penalty.
Azure Sphere - Goals fulfilled...
-Use onboard mikroBUS-1 AN pin for reading the ACS758 current sensor.
-Use onboard mikroBUS-2 CS and PWM pin for controlling relays.
-Use onboard ambient-environment sensor for detecting temperature, pressure and lux levels.
-Use onboard IMU unit for preventing tampering to the application product.
-Use onboard wifi for secure communication with end-user via android through azure cloud services(to be implemented...)
-Use onboard wifi for OTA updates and periodic sync with azure cloud services.
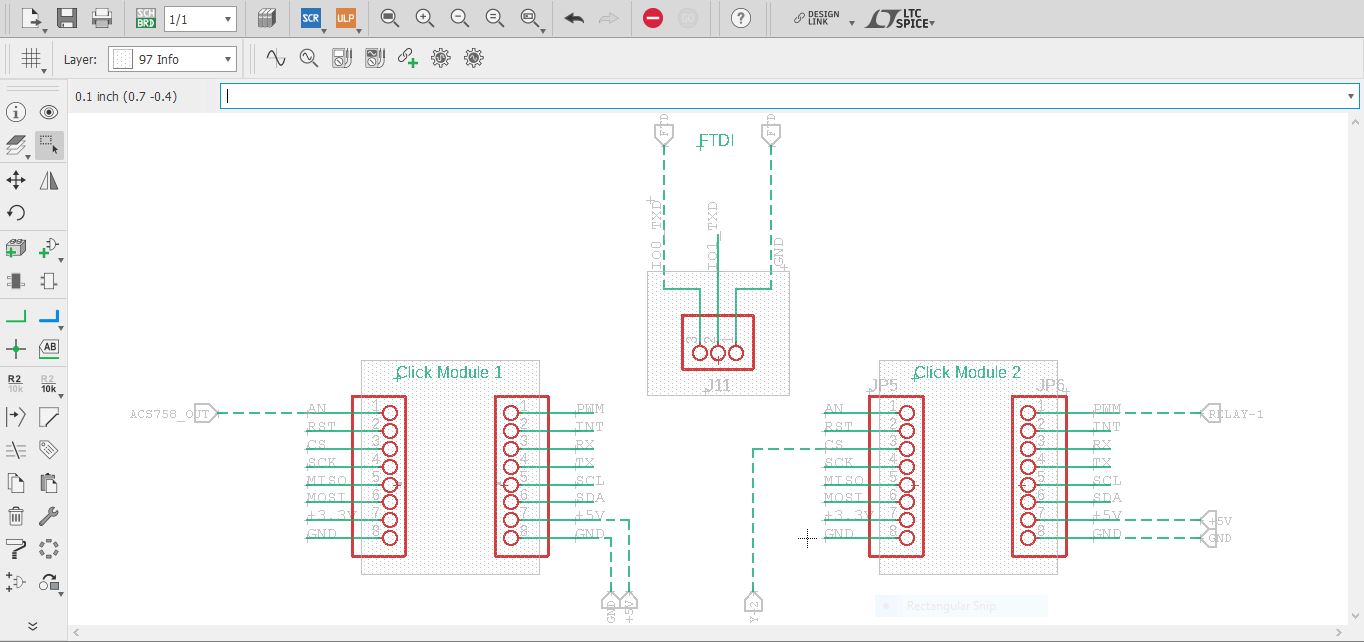
Azure Sphere - Programming & Code ModificationsThe project involves the use of handy code provided by AVNET and Azure Sphere Github workspace that has been modified, with reference to specific Mikroe Click boards. Starting with the Relay-Click and the Current-Click and moving further to the PWM, ADC(hardcore) and the IntercoreComms. Getting on-board sensor data was fun especially the Inertial Measurement Unit and the environment sensor, where I combined the codes from toggling on-board RGB LED, and relay module due to change in gyroscopic values.
The light sensor ADC value was visualized in Hterm application through the use of USB to Serial converter that was connected to azure sphere's J11 pins, that needs to be soldered manually. This provided a basic start point for the ACS758 measurement, through tuned 2.5V peak output.
Building the Circuit and AssemblyAzure Sphere MT3620 exposes every interface required for the project, wherein the Relay-I is used solely for switching the output connected load, Relay-II is used for switching the 12V exhaust fan powered through mini SMPS, the fan would only be used at times of excessive heat build-up within the enclosure from the bare-processor SOM and to keep the debris out(to be tested yet).
Similarly, the ACS758(hall-effect current sensor), is connected in series to the output AC load, that registers the analog values from the linear-proportional sensor and is further used in energy monitoring algorithm.
Initially, the connections to the relay, current sensor and the Sphere MT3620 is made with jumper cables, but soon I would be posting the PCB design files that can be used as a shield for the Azure Sphere device.
The entire setup is tried and tested barely, and soon would be revamped with 3D printed custom ABS enclosure with an OLED display.
To do...-Blockchainless Secure Bill-Payment Schema for end-user via Azure Service.
-Certificate-based device authentication to user-defined web service.
-Threat detection via failure reporting.
-Automating the security updates.
{kind=link}

Comments