

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
I am going to make a Smart BLE Hamlet For Underground Mining And Hardazous Factories using RSL10-SENSE-DB-GEVK. This Helmet can use the different sensors it monitors the underground miners and mining area. The smart Hamlet takes the environment data , air quality temperature data , underground coal dust level and dangerous gas presence and leakage , pressure inside the mine and many other data using different sensors and sends to a network that check the condition of underground mines and miners. When the smart system detect very high temperature, or rise in dangerous gas leakage, or change in pressure, or sudden fall of any miners then it triggers the alarm and tell about the Hazard going to happen to help and save the life of miners. We can also add other features in hamlet like automatic light for underground miners according the availability of light , notification alert using haptic feedback .and many others. The smart Hamlets also be very useful in factory and industries related to hazardous gas and chemical manufacturing. Because the hamlets monitors the Outer environment like temperature, pressure and and can detect the leakage of gas from pipes and give notification about the increase in hazardous gas level as it is connect the BLE network and can also act as BLE Bacon and it also have accelerometer and magnetometer so we can also detect the localization, direction and can map the area about hazard.
So we Go in Step by Step Evolution.
So first we make smart Hamlet With Smart Automatic Light System that can detect light level in underground mins/factories in Lux and if it detects the level is below the threshold and detects that miner or worker need the torch light it will automatically turns on the light
1.Smart Hamlet with Automatic Light Mount
First of all do the basic setup and of software and cmis packs as described in Getting started Guide . Now open the ON SEMICONDUCTOR IDE and then Import the Smart hamlet code main.h file and upload to the board. or you can also copy the code example of sense_noa1305_example and then make the change according the code attached with article in main.h file
Now after uploading the code to RSL 10 check the code in Jlink debugger as in pic below
Getting lux level and turning on / off the light according to need
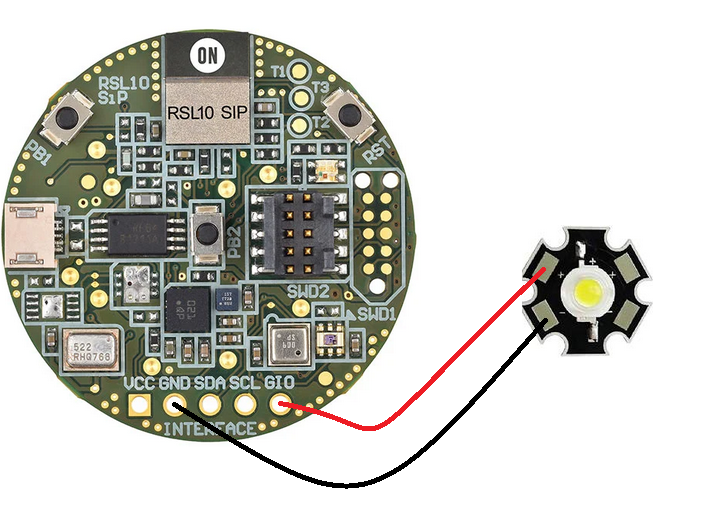
Now bring any safety worker hamlet and then attach the On RSL 10 On Hamlet Font . You can use its built in LIGHT or You can Attach a Led light with Spare GPIO nest to I2C pins . Now your First part of smart Hamlet is ready
Fixing Things in Helmet Here I am using Onboard LED Light YOU can Attach Torch or LED to Spare GPIO .
Now integrate the next part of project . The real time environment monitoring that monitors the enviroment data like Pressure , Humidity , Air , Temperature , Light to protect the miners and workers from hazards
2.Smart Helmet with Environment Monitoring and Automatic Light Under MINES
Open the IDE and then copy the example code of full sensor test of RSL10 and then open the main.h file find in SRC folder and then delete or replace the with my CODE for smart BLE Helmet with environment attached in code section.
Now select the built as release then click on built the project after that now flash the code.
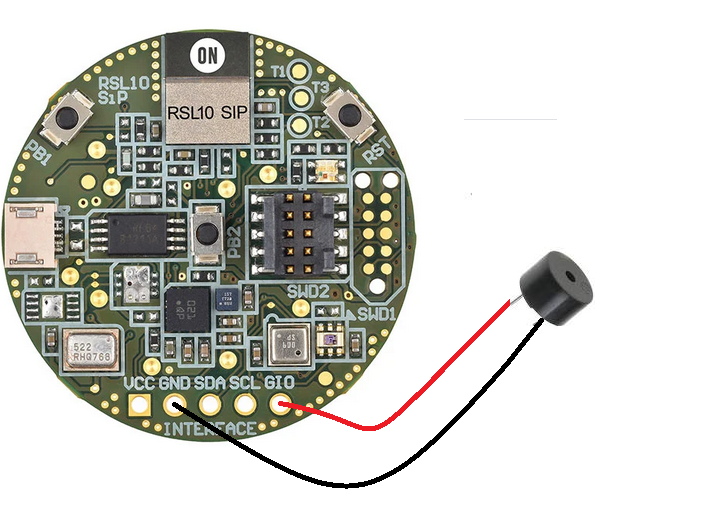
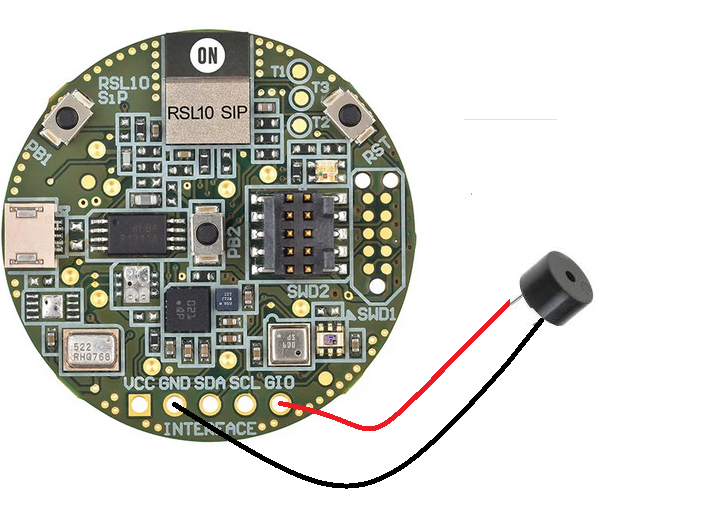
Now flashing code you can see the environment data in terminal.After Now connect a buzzer to SPARE_GIO pin next to I2C pin of RSL board. Now when ever the the RSL read the very high temperature and detect the cause of fire in mine it will automatically trigger the buzzer and alarm the people regarding that. And when the helmet detect the dark inside the mine the light attached on board will automatically turn on. and off if light is available.
{kind=link}
{kind=link}

Comments