This project shows how to interface an IMU, MPU6050 module with Redbear's CC3200 WiFi Micro and plot the real-time accelerometer, gyroscope and temperature values on Artik cloud.
First create a new device for plotting IMU data on Artik cloud, its well documented here. Next create a manifest for this device exactly as shown below,
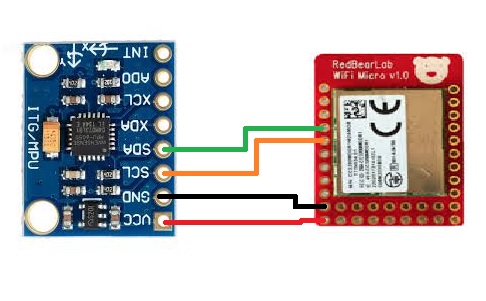
Goto Artik cloud and connect the device to obtain the device id and device token. IMU module is connected to CC3200 via I2C. Redbear CC3200 WiFi micro is supported by Energia, which provides arduino way of doing stuff and makes things easy. IMU module's SDA and SCL lines are connected to D14 and D15 of WiFi module respectively. Modify the .ino file according to your device ID and device token with WiFi router's SSID and passphrase, upload it to CC3200. Reset CC3200 and the result would look as shown in image below,





{kind=link}

Comments