


First, I explored several chassis designs online for remote controlled arduino-programmed vehicles to get inspiration. Here were some of them:
In the end, I decided to go with a sumobot jr. template, because it had the car frame structure and was customizable to different designs, and it came with the illustrator files for the laser cut. However, the sumobot was designed for two continuous servo motors, and I decided to use DC motors to simplify the process. The Invention Lab at Berkeley also did not have continuous servos (they only had 180 degree servos), so I would have had to hack the servo motors to make them continuously rotating. DC motors were also cheaper to experiment with.
Here's the video of the working sumobot jr. chassis:
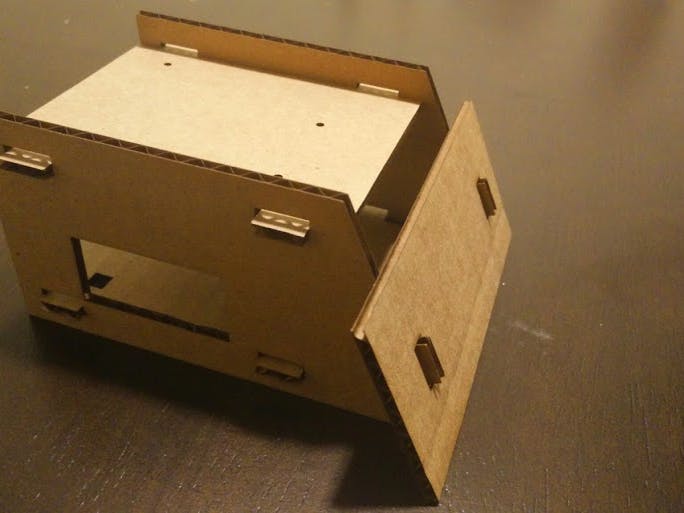
I then laser cut the initial sumobot chassis design (file attached) to see how it would measure in real life and to get an idea of how much modification would be needed. Below are images of the chassis put together. The wheels could not yet be attached to the motors.
This initial chassis looked like it would be a good start for my vehicle. I would just have to modify it to have it work with two DC motors instead of two servo motors as well as add additional space to affix an L298 H-bridge module. Once I iterated through several prototypes, I planned to laser cut this with acrylic, which would be more durable and high-fidelity.

Comments
Please log in or sign up to comment.