



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
This project was inspired by my mom who's a caterer. Because She often has to clean up her workspace I wanted to make her job a bit easier by making something that'll do the job.
The Story & Steps:After building my first robot I decided to use most of the parts I already had to make this one (click here to check it out). After learning how to make it drive autonomously doing the remaining parts of the project wasn't really difficult.
The first step was to get all other parts I'll need for this robot aside from the car kit.
The first thing I got was 2 DC Motors. I found one of my old ps3 controllers and opened it up and removed the DC motors. Although they vibrate a lot (that's why they were there in the first place 😂) I could still deal with them that's why I used them.
The next step was to decide how I'm going to control the DC motors. I initially wanted to use the L298D motor driver IC but I changed my mind and used a relay instead. I used a relay because I wanted the design to be simple while using as little power as possible.
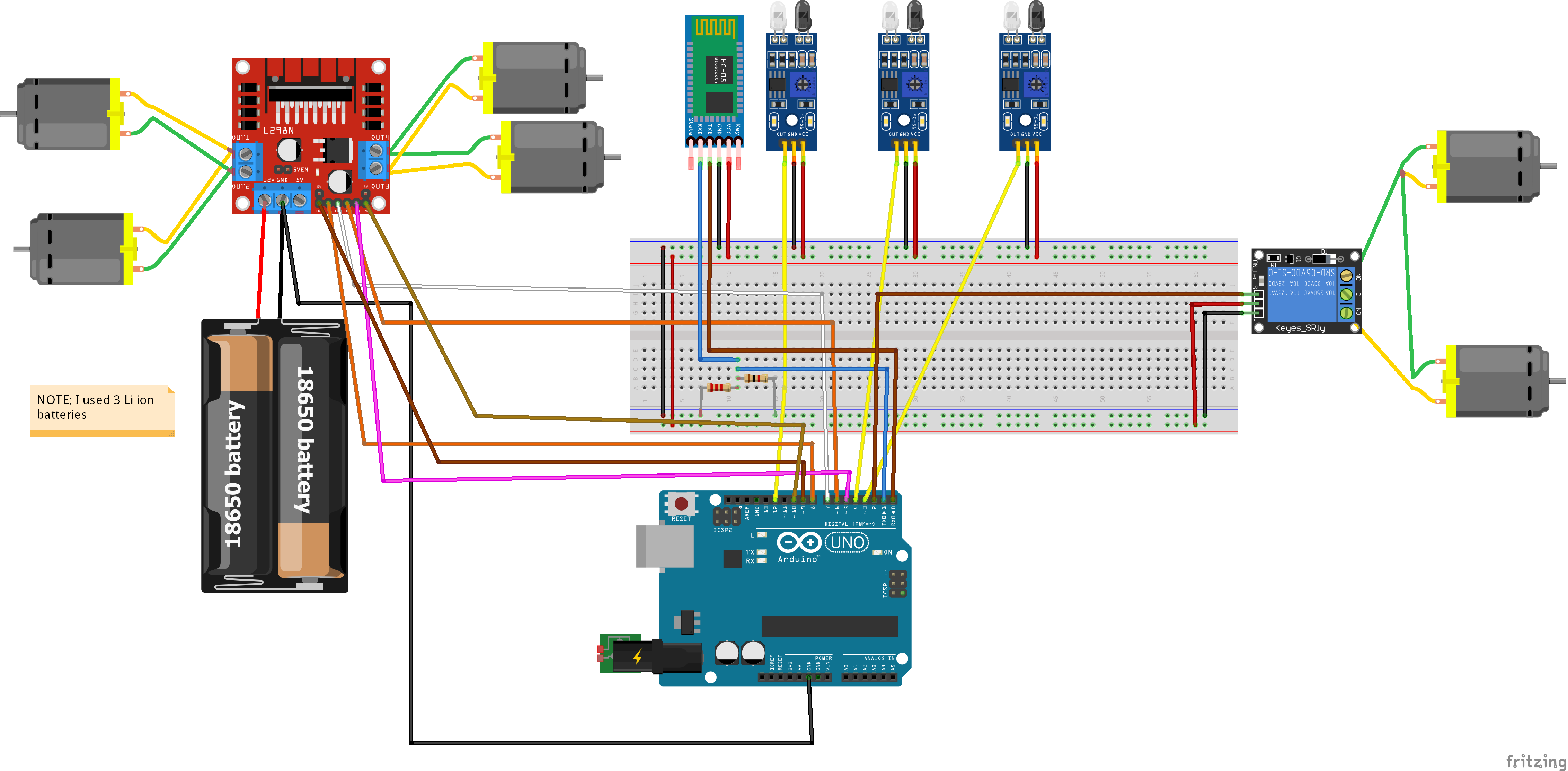
After getting the parts I needed the next step was to follow my schematic, upload code to test the app I made with MIT app builder then upload the real code for the bot and that was all.
More Pictures:
A screenshot of the app:
NOTES:
- I used 3 18650 Li ion batteries to power the bot
- On the code I commented the delay because I wanted it to move continuously without any stops but if you want stops you can remove the comments
If you have any questions or suggestions please feel free to comment





{kind=link}
Comments
Please log in or sign up to comment.