





Hardware components | ||||||
 |
| × | 2 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
Our engineering professor encouraged us to enter a design competition to create "hack" for Texas A&M's DSTR robot. This "hack" would give the robot the ability to charge using solar power while moving. This competition consisted of ten teams and three phases.
The competition consisted of an original 10 teams of 3 (Freshmen only). The was a total of 3 phases to the competition.
Phase 1In the first phase, everyone was tasked with coming up with a design for the DSTR "hack". Everyone would present there idea, and the top three teams would move on to phase two. If we placed in the top 3 of teams, we would move on to phase 2. We placed second in phase 2 and continued to implement our design.
Phase 2For phase 2 we used one 5v solar panel. Two small servo motors to control dual axis movement. We created a wall which would keep photoresistors separated. While our tracking worked, unfortunately our charging capability proved to be too slow. We were given extra time and the opportunity to fix our flaws in phase 3.
Phase 3Proceeding to phase 3 we were asked to implement a second solar panel. In doing so we had to get two stronger servo motors to fit our needs. Doing so we received first place.
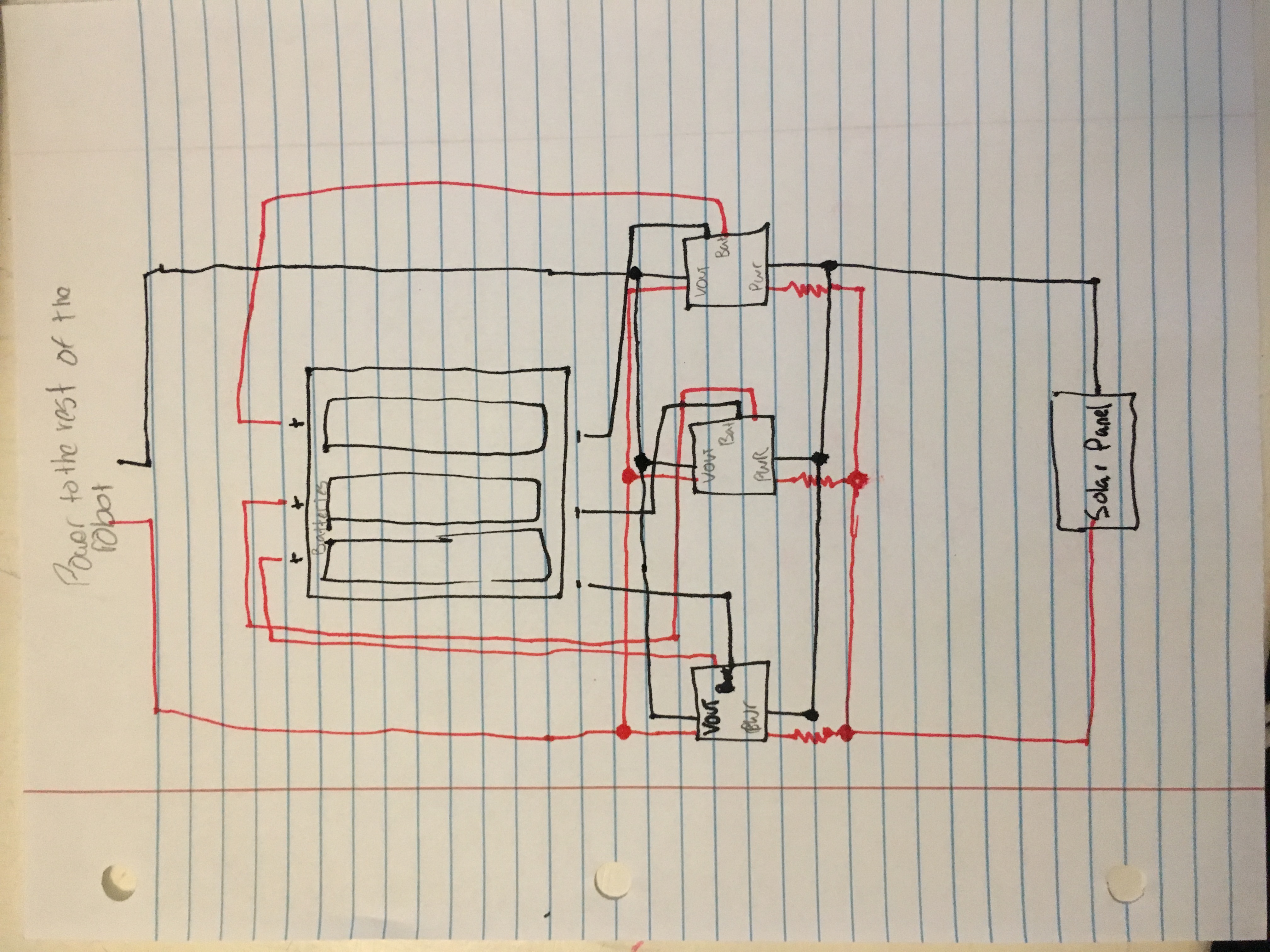
DesignThe main points of our design were: the gimbal, the solar wall, photo resistors, the dual batteries, the solar panel, and our code which would allow everything to fall in place.
The Gimbal: We used a gimbal to place on top of our robot so that it could move the solar panel.
Photoresistors: We used four photo resistors that would read ambient light and take their reading into the code.
The Solar Wall: We created a wall that would separate four photoresistors. We placed the wall adjacent to the solar panels on top of the gimbal. By doing this every photoresistor would guarantee a different reading.
Code: The code then checked the reading in each photoresistor. Depending on which resistor had the highest light value, the gimbal would rotate the panel/wall to in that direction and repeat.
The Batteries: Our batteries were then able to charge by tracking the sun for maximum efficiency.





{kind=link}
Comments