We are a student of State of Polytechnic Madiun, Indonesia and this our project for the last exams.
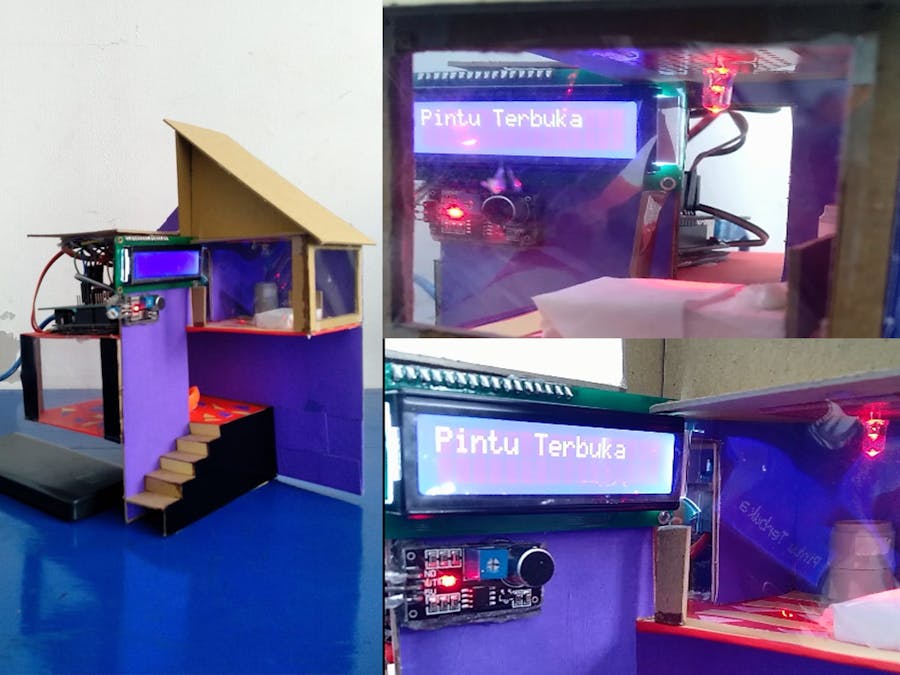
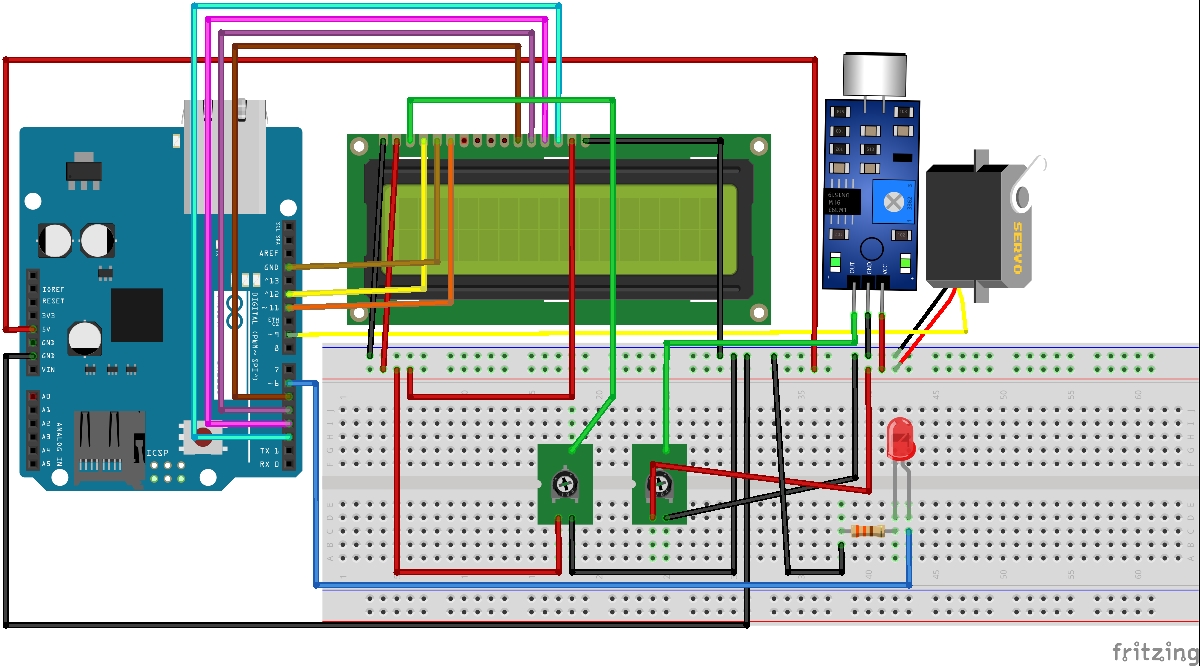
This project is to creates smart lock door system with voice activation to open and close the door using voice sensor and arduino uno. We are using LCD and red LED for the indicator. And we are also using motor servo to operate the door.
It means you can open or closing a door just by your clap or your voice.
The door open and close when the sensor detects a voice.
The DC motor operates the door 90 degrees to open and close the door when the sensor detects a voice.
The LED turns on only during open door situations.
The LCD shows you the situation as the door opening or closing. When the door is opening, it shows you "Pintu Terbuka" or "Opening the door," and when the door is closing it show you "Pintu Tertutup" or "Closing the door."
This project still have an imperfection that is the sensor can detect any voice, so other people or other voice can open or close your door.
Smart Lock Door with Voice Activation using Arduino Uno
Sorry for the inconveniences, we are forgot to take the video on landscape orientation.
#include<LiquidCrystal.h> //inisialisasi library LCD#include<Servo.h> //inisialisasi library motor servoLiquidCrystallcd(12,11,5,4,3,2);//inisialisasi pin LCD yang digunakan yaitu rs=12,en=11,d4=5,d5=4,d6=3,d7=2Servomyservo1;//inisialisasi variabel dari untuk menggerakkan motor servointpos=0;//inisialisasi keadaan awal dari motor servo yaitu pos=0intLED1=6;//inisialisasi pin LED terhubung ke pin 6 arduinointsoundSensor=8;//inisialisasi pin sensor suara terhubung ke pin 8 arduinobooleanLEDStatus=false;//inisialisasi variabel LEDStatus berupa tipe data boolean yang memiliki nilai awal yaitu falsevoidsetup(){//prosedur untuk setupSerial.begin(9600);// digunakan untuk memulai komunikasi serial dengan kecepatan transmisi data 9600 bpspinMode(LED1,OUTPUT);//konfigurasi pin LED1 sebagai outputpinMode(soundSensor,INPUT);//konfigurasi pin sensor suara sebagai INPUTmyservo1.attach(9);//kabel data servo dihubungkan ke pin 9 arduinointa;//inisialisasi variabel a berupa tipe data integerlcd.begin(16,2);//menunjukkan LCD yang digunakan memiliki 16 kolom dan 2 barislcd.setCursor(16,0);//untuk menentukan letak kursor pertama atau letak awal karakter pada kolom-17 baris-1lcd.print("Project UAS");//menampilkan karakter "Project UAS" pada baris pertamalcd.setCursor(16,1);//untuk menentukan letak kursor kedua atau letak awal karakter pada kolom-17 baris-2lcd.print("MIKRO II");//menampilkan karakter "MIKRO II" pada baris keduafor(a=0;a<16;a++){//fungsi for digunakan untuk pengulangan dengan kondisi awal variabel a=0 hingga a<16 dengan menaikkan nilai variabel a sebesar 1lcd.scrollDisplayLeft();//pernyataan yang diulang adalah input yang ditampilkan pada LCD yang bergerak ke kiri .delay(100);//jeda waktu 100 ms}delay(100);//jeda waktu untuk membuat LCD dalam kondisi awal adalah 100mslcd.clear();//setelah jeda waktu 100ms, tampilan LCD seperti semula atau menghapus apa yang ditampilkan sebelumnya untuk selanjutnya menampilkan karakter selanjutnyalcd.setCursor(16,0);//untuk menentukan letak kursor pertama atau letak awal karakter pada kolom-17 baris-1lcd.print("Kelompok ????");//menampilkan karakter "Kelompok ????" pada baris pertamalcd.setCursor(16,1);//untuk menentukan letak kursor kedua atau letak awal karakter pada kolom-17 baris-2lcd.print("TKK_4_C");//menampilkan karakter "TKK_4_C" pada baris keduafor(a=0;a<16;a++){//fungsi for digunakan untuk pengulangan dengan kondisi awal variabel a=0 hingga a<16 dengan menaikkan nilai variabel a sebesar 1lcd.scrollDisplayLeft();//pernyataan yang diulang adalah input yang ditampilkan pada LCD yang bergerak ke kiri .delay(100);//jeda waktu 100ms}delay(100);//jeda waktu untuk membuat LCD dalam kondisi awal adalah 100mslcd.clear();//setelah jeda waktu 100ms, tampilan LCD seperti semula atau menghapus apa yang ditampilkan sebelumnya untuk selanjutnya ditampilkan kembali dengan jeda waktu 100ms}voidloop(){//prosedur untuk looping atau pengulanganinta;//inisialisasi variabel a berupa tipe data integerintSensorData=digitalRead(soundSensor);//membaca sinyal keluaran dari sensor berupa data digital yaitu logika 1 atau 0if(SensorData==1){//jika hasil pembacaan berogika sama dengan 1, makaif(LEDStatus==false){//jika kondisi lED bernilai falselcd.begin(16,2);lcd.setCursor(16,0);//penentuan letak kursor pada baris pertamalcd.print("Pintu Tertutup");//menampilkan karakter "Pintu Tertutup" pada baris pertamalcd.setCursor(16,1);//penentuan letak kursor pada baris kedualcd.print(" ");//berisi spasi pada baris keduafor(a=0;a<16;a++){//fungsi pengulangan untuk nilai a=0 hingga a<16, variabel a terus bertambahlcd.scrollDisplayLeft();//karakter yang tampil pada LCD bergerak berjalan ke kiridelay(100);//jeda waktu 100ms}LEDStatus=true;//kondisi LED sama dengan truedigitalWrite(LED1,LOW);//memberi nilai LOW pada LED1, atau lampu LED matifor(pos=90;pos<=180;pos+=1){//fungsi perulangan untuk posisi servo dari 90 derajat sampai 180 derajat dengan setiap kenaikan 1myservo1.write(pos);//memberitahu servo untuk pergi ke posisi 'pos'delay(50);//jeda waktu 50msSerial.print("on");//menampilkan karakter "on" pada serial monitorSerial.println("");}}else{//jika salah, makalcd.begin(16,2);lcd.setCursor(16,0);//penentuan letak kursor pada baris pertamalcd.print("Pintu Terbuka");//menampilkan karakter "Pintu Terbuka" pada baris pertamalcd.setCursor(16,1);//penentuan letak kursor pada baris kedualcd.print(" ");//berisi spasi pada baris keduafor(a=0;a<16;a++){//fungsi pengulangan untuk nilai a=0 hingga a<16, variabel a terus bertambahlcd.scrollDisplayLeft();//karakter yang tampil pada LCD bergerak berjalan ke kiridelay(100);//jeda waktu 100ms}LEDStatus=false;//kondisi LED sama dengan falsedigitalWrite(LED1,HIGH);//memberi nilai HIGH pada LED1, atau lampu LED nyalafor(pos=180;pos>=90;pos-=1){//fungsi perulangan untuk posisi servo dari 180 derajat sampai 90 derajat dengan setiap penurunan 1myservo1.write(pos);//memberitahu servo untuk pergi ke posisi 'pos'delay(50);//jeda waktu 50msSerial.print("off");//menampilkan karakter "off" pada serial monitorSerial.println("");}}}}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.