

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
For the doll museum, we are developing an assistant robot that, when approaching the exhibit, will give out information about the exhibit by voice and on the screen. The robot uses the operating system for ROS robots (NVIDIA jetson nano + Ubuntu 18.04 + ROS melodic (https://www.hackster.io/belochka/controlling-the-jetbot-robot-from-ros-014620)).
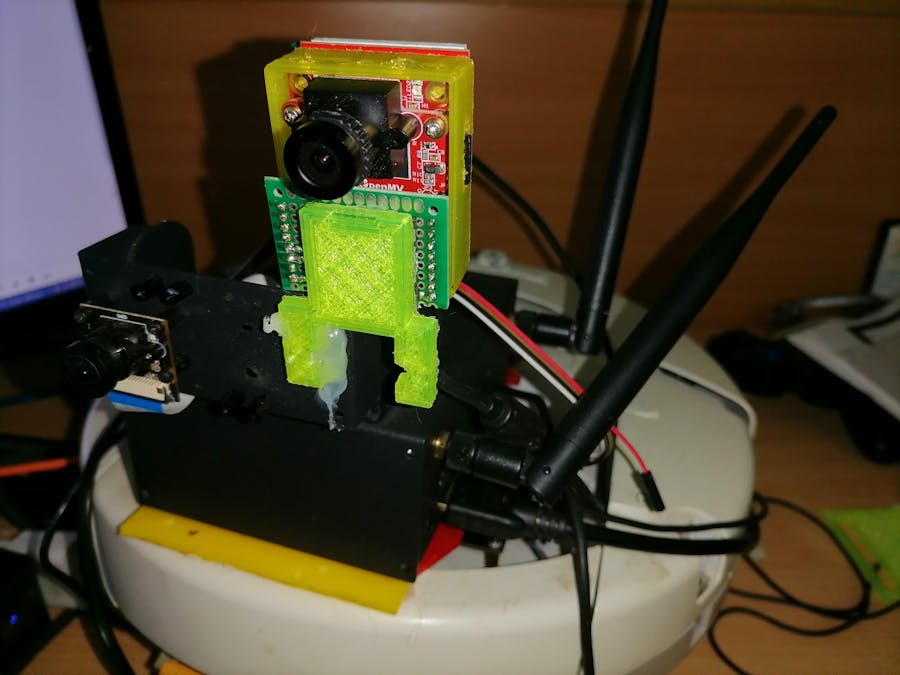
To search for an exhibit, we decided to use the April tag tag system, each exhibit is equipped with an April tag tag. To determine the label, we will use OPEN MV H7+. There is also an OpenMV LCD Shield available
Apriltag tags can be printed in the Openmv IDE
And print it out
We are writing a program for recognition. Search for labels and send data to the serial port and output to the OpenMV LCD Shield (with scaling)
# Search AprilTags
#
import sensor, image, time, lcd, pyb
from pyb import UART
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.VGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
lcd.init()
clock = time.clock()
uart = UART(3, 9600, timeout_char=1000)
uart.init(9600, bits=8, parity=None, stop=1, timeout_char=1000)
uartget=False
tag_families = 0
tag_families |= image.TAG16H5 # comment out to disable this family
tag_families |= image.TAG25H7 # comment out to disable this family
tag_families |= image.TAG25H9 # comment out to disable this family
tag_families |= image.TAG36H10 # comment out to disable this family
tag_families |= image.TAG36H11 # comment out to disable this family (default family)
tag_families |= image.ARTOOLKIT # comment out to disable this family
start = pyb.millis()
while(True):
#clock.tick()
img = sensor.snapshot()
if pyb.elapsed_millis(start) >= 200:
arrobj=img.find_apriltags(families=tag_families)
#print(len(arrobj))
#if len(img.find_apriltags(families=tag_families))>0:
if len(arrobj)>0 :
strsend="#"+str(len(arrobj))+";"
for tag in arrobj: # defaults to TAG36H11 without "families".
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
strsend=strsend+str(tag.id())+";"+str(tag.cx())+";"+str(tag.cy())+";"+str(tag.h())+";"+str(tag.w())+";"
strsend=strsend+"$"
print(strsend)
uart.write(strsend)
start = pyb.millis()
pyb.delay(200)
# get uart data
if (uart.any()>0):
s=uart.read()
str2=str2+s
if s=='$':
uartget=True
if uartget == True:
#
print("get data from uart = %s",str2)
uartget=False
str2=""
#
lcd.display(img.scale(0.25,0.25))
#print(clock.fps())Sending data to the port
N;id1;x1;y1;h1;w1;……;idn;xn;yn;hn;wnКопируем скрипт на openmv cam и переименовываем его в main.py, чтобы он запускался при запуске openmv cam h7+.
Подсоединение к компьютеру по последовательному порту, питание по USB от NVIDIA jetson nano.
The robot is equipped with the rosbridge package and robot_ros recycled (see the material https://www.hackster.io/belochka/controlling-the-jetbot-robot-from-ros-014620 ). The original is here - https://github.com/dusty-nv/jetbot_ros. Modified package - https://github.com/victoruni/jetbot_ros/tree/master/
The results of determining the label will be sent via the serial port to NVIDIA jetson nano with the Ubuntu 18.04 operating system and the ROS Melodic version to the script jetbot_search_apriltag.py. The content of the script
#!/usr/bin/env python
import rospy
import time
import serial
from std_msgs.msg import String, Int16
from geometry_msgs.msg import Twist
rospy.set_param("/jetbot_apriltag/goal",0)
rospy.set_param("/jetbot_apriltag/sub_goal",0)
serial_openmv=serial.Serial("/dev/ttyUSB0", 9600, timeout=1)
pub=rospy.Publisher("/jetbot_motors/cmd_raw",Twist)
def parsestring(data):
go=0
rospy.loginfo("data_serial = %s",data)
# get tags
tags=[[0]*5 for i in range(6)]
dd=data.replace("#","").split(";")
#rospy.loginfo(dd)
for i in range(int(dd[0])):
for j in range(5):
tags[i][j%5]=int(dd[i*5+j+1])
#rospy.loginfo(tags)
#
goal= rospy.get_param("/jetbot_apriltag/goal")
for i in range(int(dd[0])):
rospy.loginfo('goal=%s',goal)
if goal==0:
go=0
elif tags[i][0]==goal:
go=2
r=tags[i][1]+tags[i][3]/2
rospy.loginfo('r=%s',r)
if r<280 or r>380 :
go=4
elif tags[i][3]>200 :
go=0
rospy.set_param("/jetbot_apriltag/goal",0)
i=int(dd[0])
sub_goal= rospy.get_param("/jetbot_apriltag/sub_goal")
for i in range(int(dd[0])):
if goal==0:
go=0
elif tags[i][1]==goal:
go=2
elif tags[i][j%5]==sub_goal:
go=3
#elif tags[i][j%5]==sub_goal:
# go=3
else: #
go=4
rospy.loginfo('go=%s',go)
if go==4:
msg=Twist()
msg.linear.x=0.0;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.5;
pub.publish(msg)
elif go==2:
msg=Twist()
msg.linear.x=0.5;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.0;
pub.publish(msg)
elif go==0:
msg=Twist()
msg.linear.x=0.0;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.0;
pub.publish(msg)
def set_apriltag_purpose(msg):
rospy.set_param("/jetbot_apriltag/goal",msg.data)
rospy.loginfo(' apriltag_purpose=%d', msg.data)
# initialization
if __name__ == '__main__':
data_serial=""
data_complete=False
# setup ros node
rospy.init_node('jetbot_search_apriltag')
rospy.Subscriber('set_apriltag_goal', Int16, set_apriltag_purpose)
# start running
while not rospy.core.is_shutdown():
while serial_openmv.inWaiting()>0:
c=serial_openmv.read()
#rospy.loginfo(c)
if c=='$':
data_complete=True
break
else:
data_serial=data_serial+c
if data_complete == True:
parsestring(data_serial)
data_serial=""
data_complete=False
# Update ROS
rospy.rostime.wallsleep(0.1)Selecting a label to search from a web page
When you select a tag and press the Search tag key from a web page, the ROS parameter is set
goal_april_tag = new ROSLIB.Param({
ros : ros,
name : "/jetbot_apriltag/goal",
});
function start_search() {
if(startsearchtag==0) {
document.getElementById("button_search_apriltag").value="STOP_Search_tag";
var n=document.getElementById("choice_apriltag").options.selectedIndex;
var val=document.getElementById("choice_apriltag").options[n].value;
goal_april_tag.set(parseInt(val));
}
else {
document.getElementById("button_search_apriltag").value="Search_tag";
goal_april_tag.set(0);
}
startsearchtag=1-startsearchtag;
}The script jetbot_search_apriltag.py analyzes the value of the parameter and gives a command to rotate the platform until the necessary label falls into the center on the x axis.
msg=Twist()
msg.linear.x=0.0;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.5;
pub.publish(msg)If the placemark is close to the center on the x-axis, commands are sent to move the platform straight,
msg=Twist()
msg.linear.x=0.5;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.0;
pub.publish(msg)When approaching the placemark at a close distance
msg=Twist()
msg.linear.x=0.5;
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=0.0;
pub.publish(msg)And set
rospy.set_param("/jetbot_apriltag/goal",0)The search is finished !!!
Launch
Terminal 1
roscore Terminal 2
roslaunch jetbot_ros launch05. launchTerminal 3 rosrun
jetbot_ros jetbot_search_apriltag.pyAll materials on github https://github.com/victoruni/jetbot_ros/tree/master/




Comments