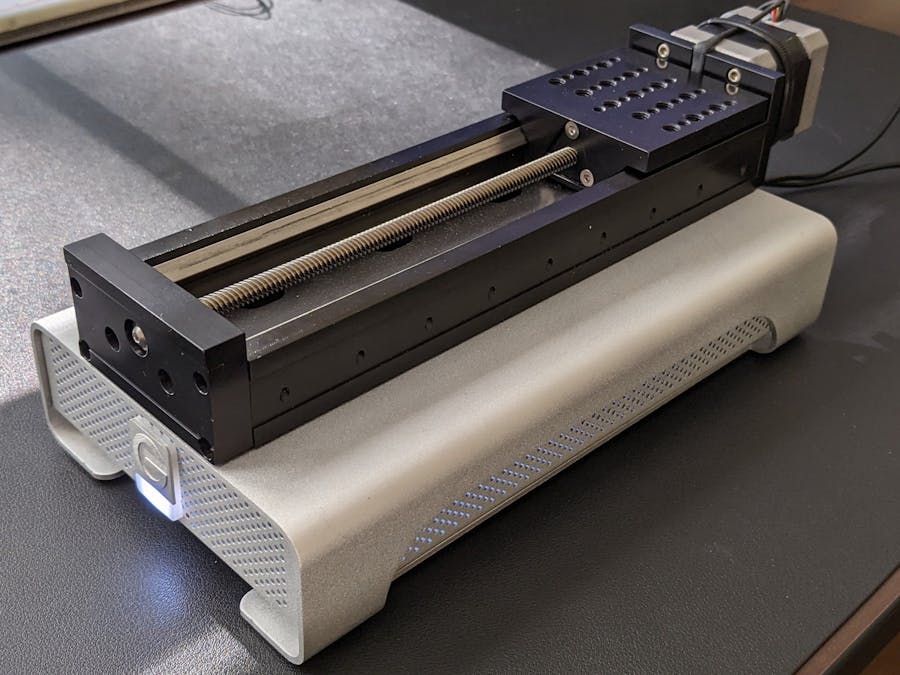
The purpose of this build is to have a handy, desktop stage that I can use for focus stacking experiments. This particular stage will hold a DSLR and be controlled via a C# Desktop App. All I really need is a Goto position function - so this motor is fine (No encoder, just a homing limit switch).
The first step was to get the parts together and see if they worked:
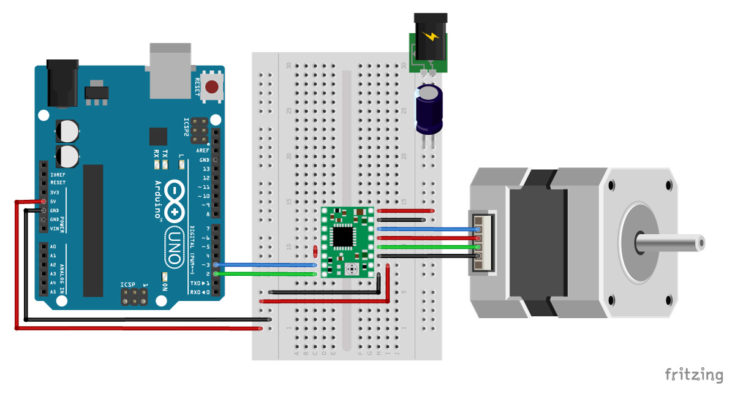
I found the Arduino already connected to the motor driver with a step-down converter
This Arduino Leonardo-type board is great because it is designed for keyboard feedback, so the serial communication implementation went very smoothly. The next step was to take apart what I had on the table and breadboard it.
I soldered the 7 wires coming from the stage to some CAT5 cable
This G-Drive case is perfectly sized for the stage and there is plenty of room for the controllers. It is also a great heatsink (I am driving the stepper way faster than it is intended to be driven, and it gets pretty hot). I used this setup to tweak the driver current and test the software. Once all systems were go, I transferred everything to some perf-board and screwed the housing together.
Came out pretty much how I had planned. I wish I had utilized the existing I/O board from the drive, but I lost the original power supply. It was one of those PS/2 cables with 12V and 5V... it would have been perfect, and I could have used the firewire cables instead of the CAT5. I'm excited to use this for future projects! I am sure the software will evolve.
GIF of the C# UI in action
The ol' hacksaw
The camera actually stays in place without any fasteners
// MOTOR SETUP
#include <AccelStepper.h>#define dirPin 5#define stepPin 4#define motorInterfaceType 1AccelStepper stepper= AccelStepper(motorInterfaceType, stepPin, dirPin);// SPEEDS
int fast=800;int med=400;int slow=100;// HOMING
int sensor=10;int range=4750;// COMMS
long pos=0;bool CMD_G= false;void setup(){ Serial.begin(9600);while(!Serial){; // waitfor serial port to connect. Needed for native USB port only
} establishContact(); // send a byte to establish contact until receiver responds
Serial.println("HELLO"); pinMode(sensor, INPUT_PULLUP); // INIT HALL SENSOR
stepper.setMaxSpeed(1000); // MOTOR CONFIG
}void loop(){ int bytes= Serial.available();if(bytes > 0){ int inByte= Serial.read();if(inByte==72) // H
{ homeStage();}elseif(inByte==71) // G
{CMD_G= true;}elseif(CMD_G){pos+=(long(inByte - '0') * (pow(10, bytes)) + 1) / 10;}}elseif(CMD_G){ moveStage();pos=0;CMD_G= false;}}void establishContact(){while(Serial.available() <=0){ Serial.println("CONNECTING..."); delay(300);}}void homeStage(){ Serial.println("HOMING"); int homing=1;while(homing==1){ stepper.setSpeed(-med); stepper.runSpeed();homing= digitalRead(10);} stepper.setCurrentPosition(0);while(stepper.currentPosition() != range / 2){ stepper.setSpeed(fast); stepper.runSpeed();} Serial.println("HOMED");}void moveStage(){if(0 <= pos <= range){ int dir=1;if(stepper.currentPosition() > pos){dir= -1;}while(stepper.currentPosition() != pos){ stepper.setSpeed(dir * fast); stepper.runSpeed();}} Serial.println("OK");}
Desktop App
C#
usingSystem;usingSystem.Windows.Forms;usingSystem.IO.Ports;usingSystem.Drawing;delegatevoidStringArgReturningVoidDelegate(stringtext);namespaceStepino{publicpartialclassFormMain:Form{privateSerialPort_Port;publicFormMain(){InitializeComponent();FormClosed+=newFormClosedEventHandler(Form1_FormClosed);_Port=newSerialPort{BaudRate=9600,DataBits=8,DiscardNull=false,DtrEnable=false,RtsEnable=true,Handshake=Handshake.None,ReadBufferSize=4096,ReadTimeout=-1,WriteTimeout=-1,StopBits=StopBits.One};_Port.DataReceived+=_Port_DataReceived;}voidForm1_FormClosed(objectsender,FormClosedEventArgse){_Port.Close();}privatevoidbtnHome_Click(objectsender,EventArgse){_Port.Write("H");InMotion(true);}privatevoidbtnGo_Click(objectsender,EventArgse){statusLabel.Text="";InMotion(true);_Port.Write("G"+numericUpDown1.Value.ToString());}privatevoidInMotion(boolmoving){gbxMotion.Enabled=!moving;}privatevoidbtnScan_Click(objectsender,EventArgse){portComboBox.Items.Clear();foreach(stringsinSerialPort.GetPortNames()){portComboBox.Items.Add(s);}portComboBox.SelectedIndex=portComboBox.Items.Count-1;_Port.PortName=portComboBox.Text;}privatevoidbtnConnect_Click(objectsender,EventArgse){try{statusLabel.Text="";_Port.Open();System.Threading.Thread.Sleep(100);_Port.Write(" ");}catch(Exceptionex){MessageBox.Show(ex.Message);}}privatevoidbtnDisconnect_Click(objectsender,EventArgse){statusLabel.Text="";_Port.Close();}privatevoidportComboBox_SelectedIndexChanged(objectsender,EventArgse){if(_Port.IsOpen)return;_Port.PortName=portComboBox.Text;}privatevoid_Port_DataReceived(objectsender,SerialDataReceivedEventArgse){SerialPortserialPort=(SerialPort)sender;stringmsg;msg=serialPort.ReadLine();MsgIn(msg);}privatevoidMsgIn(stringtext){// InvokeRequired required compares the thread ID of the// calling thread to the thread ID of the creating thread.// If these threads are different, it returns true.if(statusStrip.InvokeRequired){StringArgReturningVoidDelegated=newStringArgReturningVoidDelegate(MsgIn);Invoke(d,newobject[]{text});}else{statusLabel.Text=text.Trim();if(text.Contains("OK")||text.Contains("HOMED")){InMotion(false);if(text.Contains("HOMED"))btnHome.BackColor=Color.LawnGreen;}}}}}














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.