
Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 4 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
 |
| × | 15 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Initial Idea
The turret
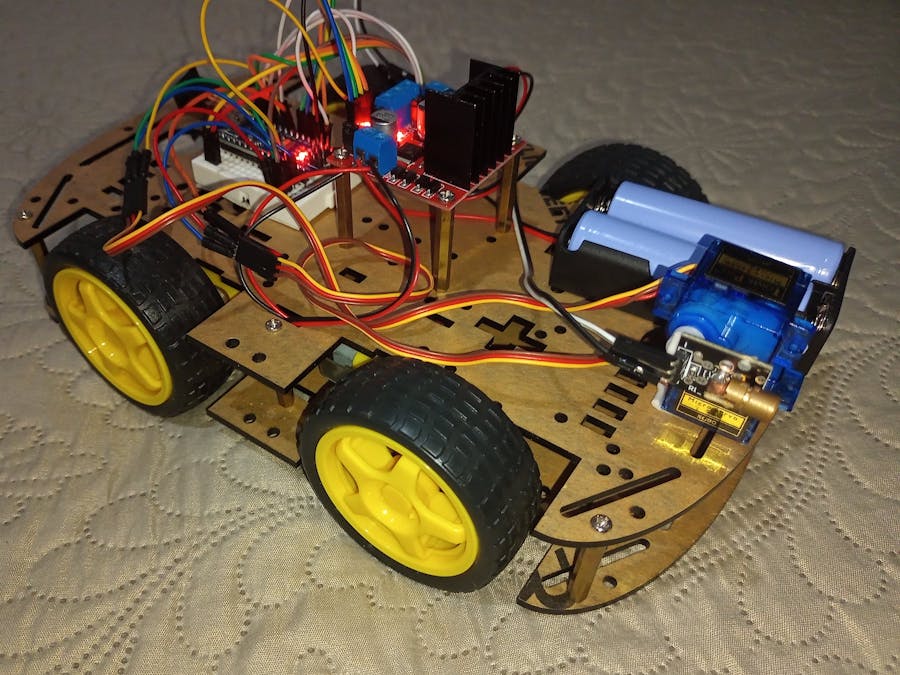
Everything assembled
Project working:
Read moreI already did a RC car using Arduino and it worked pretty well, but I think it needs something more.
Things I usedI used two NRF24L01+ modules to make the comunications between the car and the remote control. It has a impressed antenna on it's PCB and can reach a distance of 100 meters.
The NRF24L01+ module
I used a 4wd car chassis kit like that one:
The car chassis kit (include motors, wheels, screws and nuts)
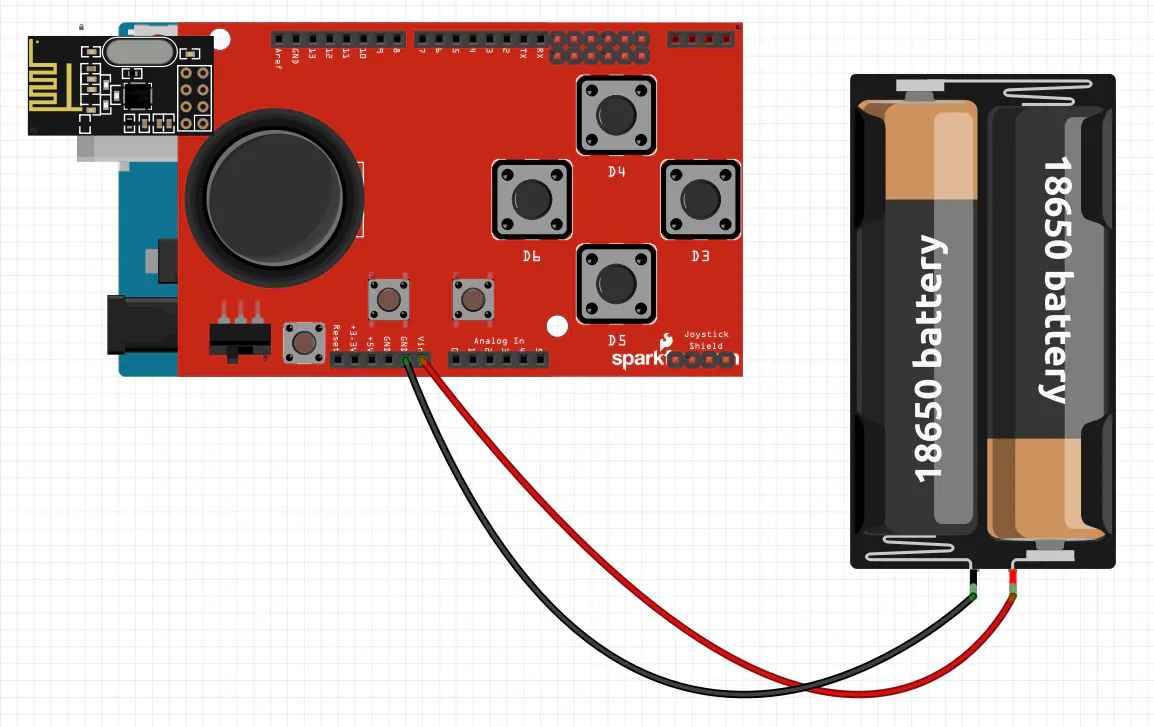
For the remote control I used Arduino Uno and a Joystick shield.
The joystick shield (Funduino V1.A)
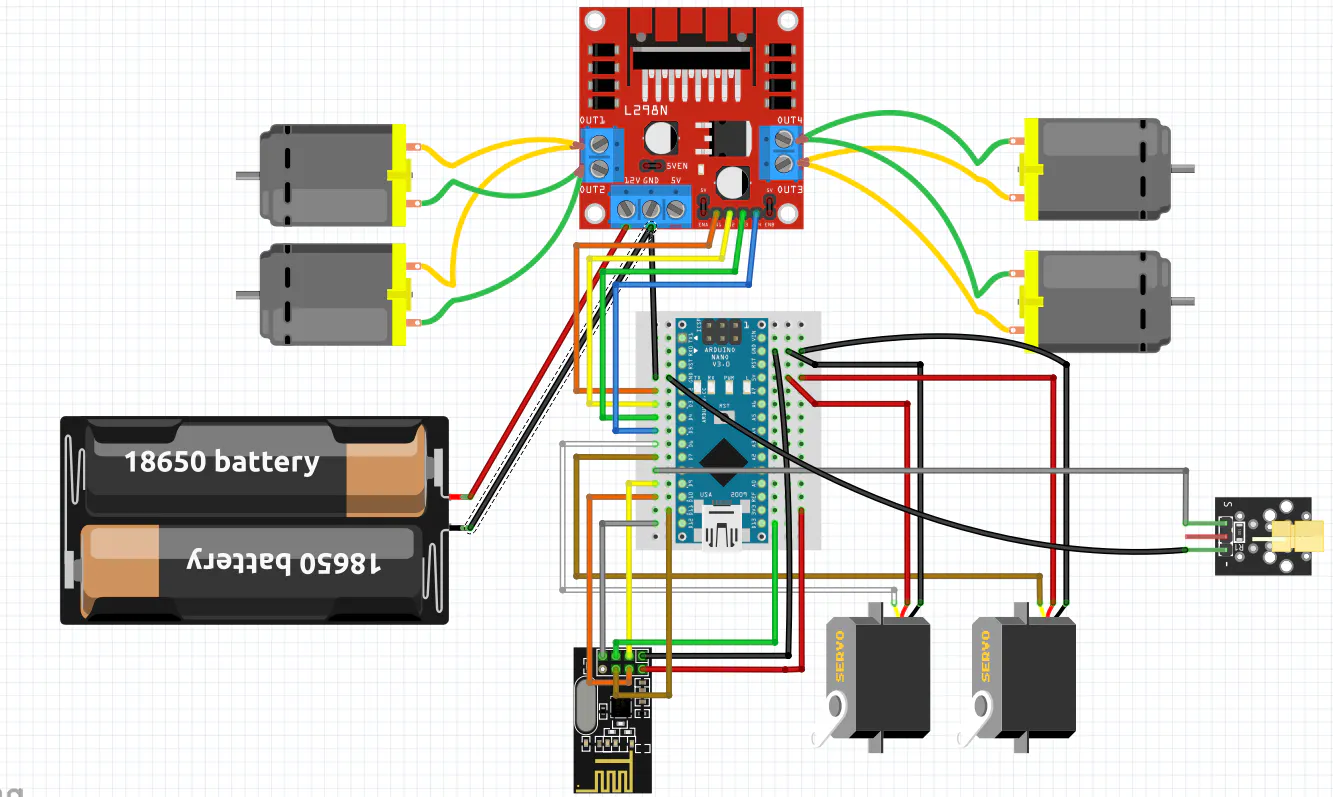
To control the car I'm using Arduino Nano and a L298n H-Bridge. To power everything, I'm using 18650 batteries like that one:
Batteries
After a moment of thinking, I decided to make a laser turret for the car using two servo motors, controlled remotely.
The turret
This is how the car looks like after the assembling:
The car
This is how the control looks like:
The remote control
Video of the project working
{kind=link}
{kind=link}

Comments