Every day, millions of tones of waste are produced, much of it is mishandled and dumped in landfills. Underwater pollution results from debris, sedimentation, and agricultural waste washing into water bodies during rainy seasons. Compounding the issue is the heavy plastics, metals, glass, and organic debris that sink to the bottom of the water body.
The OCTACLEANER aims to address the significant problem of underwater pollution, which includes various types of waste such as organic matter, plastics, and muck. The robot is designed to collect and remove this debris from water bodies, thereby helping to mitigate the environmental impact of underwater pollution.
Underwater pollution contributes to the deterioration of aquatic ecosystems and can lead to problems like sedimentation, decreased water capacity, and potential flooding. Pollution in water bodies has adverse effects on human health and has contributed to the decline of fish populations. Current methods of removing underwater waste often involve divers, which is risky and time-consuming.
How it Works:
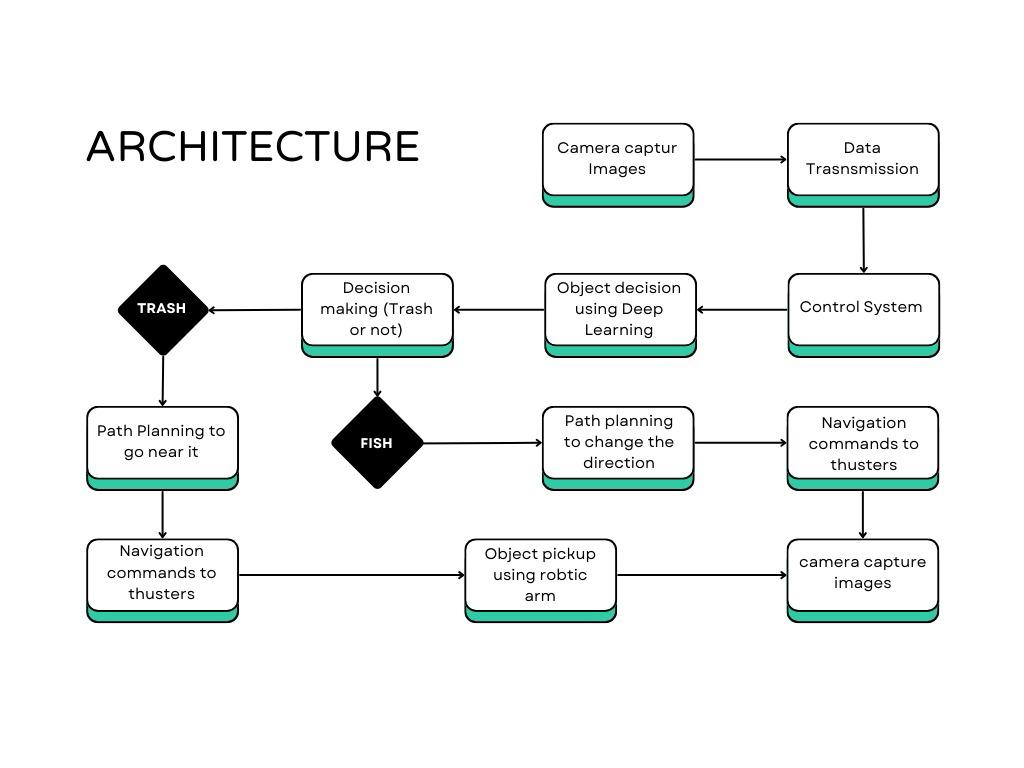
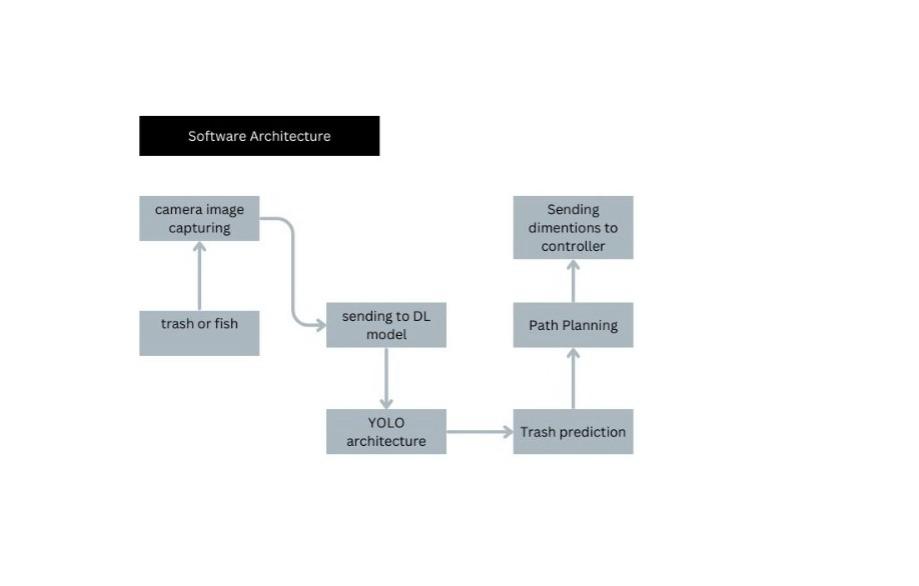
Octacleaner is an innovative underwater robot engineered to remove waste from deep within water bodies. Drawing inspiration from octopuses and fish, its design incorporates octopus-like gripping technology to collect trash and a streamlined, fish-like structure to reduce water resistance. Equipped with a front-facing camera, the robot captures a live video feed of its surroundings. This feed is transformed into images that are analyzed by a YOLOv5 model for trash detection. The model differentiates between fish and trash; if fish are detected, the robot alters its course slightly to avoid harming them. When trash is identified, the robot halts, and its octopus-like gripping hand retrieves the debris and deposits it into a garbage bag. This fusion of design and technology enables Octacleaner to efficiently clean water bodies while safeguarding marine life.
3D model
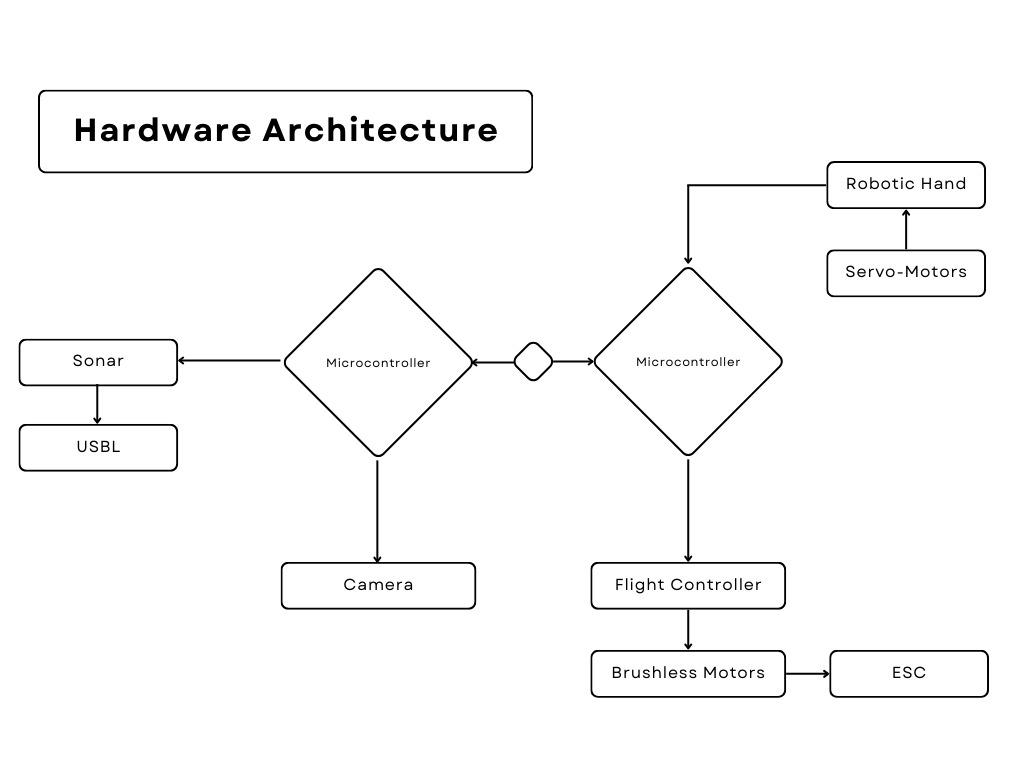
Components and Functionality:
Thrusters: Used for propulsion and movement underwater.
Octopus-Inspired Hand: Grips and collects trash.
Muck Cleaner: Removes sediment and muck from the waterbed using copper zinc filters.
Camera: Mounted on the front to detect debris.
Raspberry Pi: Serves as the control system for the robot.
Machine Learning: Utilizes Tiny ML to identify and classify underwater trash, enabling the robot to distinguish between macro and micro waste.
Results and Future Plans:
Prototypes: Two prototypes have been developed and tested. The first faced issues with propeller functionality due to water pressure. The second, with improved thrusters and muck cleaner, successfully collected trash but had issues with battery life and muck cleaner clogging.
Testing: The robot has been tested in a lotus pond, demonstrating its ability to move autonomously, avoid obstacles, and collect waste.
Improvements: Plans include enhancing communication systems with acoustic signals, adding pressure sensors, increasing weight-lifting capacity, and improving battery life. Future tests will be conducted in lakes and rivers, with the ultimate goal of cleaning ocean pollution.
Conclusion:
The OCTACLEANER aims to create an efficient and safe method for cleaning underwater pollution. By addressing technical challenges and improving the robot's capabilities, the project seeks to make a significant impact on environmental conservation and public health.




{kind=link}
{kind=link}
{kind=link}

Comments