


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
We now have created a platform on Hackster.IO for the Pulse Train Hat, if you could help us by becoming a member, then it would help us a lot as we need 25 members to get it featured.
https://www.hackster.io/pulse-train-hat
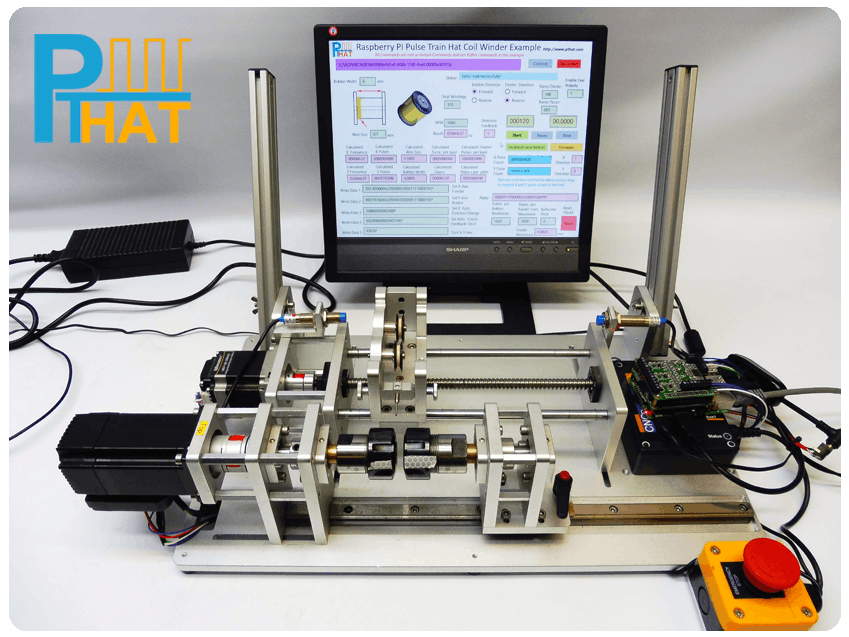
Instruction OverviewWith this example, we show how to control a Coil Winding Machine with the PTHAT.
The Coil Winders we tested on are both our own production machines and use stepper motors for both the feeder arm and bobbin motor assembly. Within the software, you will see you can set the pulses per revolution for the bobbin motor and the pulses per revolution along with pulses per 1mm travel on the feeder arm.
- Within the application you first connect to your Raspberry PI serial port by clicking the Connect button.
- Make sure your Coil Winder is set to the left side of the bobbin.
- Now set your bobbin diameter, wire size, total windings and RPM.
- Now, finally click on the Start button and it will send out the commands set and start the Coil Winder.
Watching the video below will give a better overview.
Coil Winder ExampleCommands used in this example are:
- Set Axis Command
- Set Auto Direction Change Command
- Set Auto Count Pulse Out Command
- Start Axis Command
- Stop Axis Command
- Pause/Resume Axis Command
- Request Current Pulse Count Command
- Toggle Motor Enable Line
- Request Firmware Version
- Reset PTHAT
In this video, we give an overview of the example software we supply to control a Coil Winding Machine.
The end developer has easily modified this example to build their own application.
The example application was developed in Visual Studio 2015, and can be used with Windows 10 IOT on the Raspberry PI or compiled to x86/x64 for use on a PC. The example has been written in C# as a Universal Windows Platform (UWP).
Please use the following link to download the full source code: Download Now
Gallery





Comments
Please log in or sign up to comment.