


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
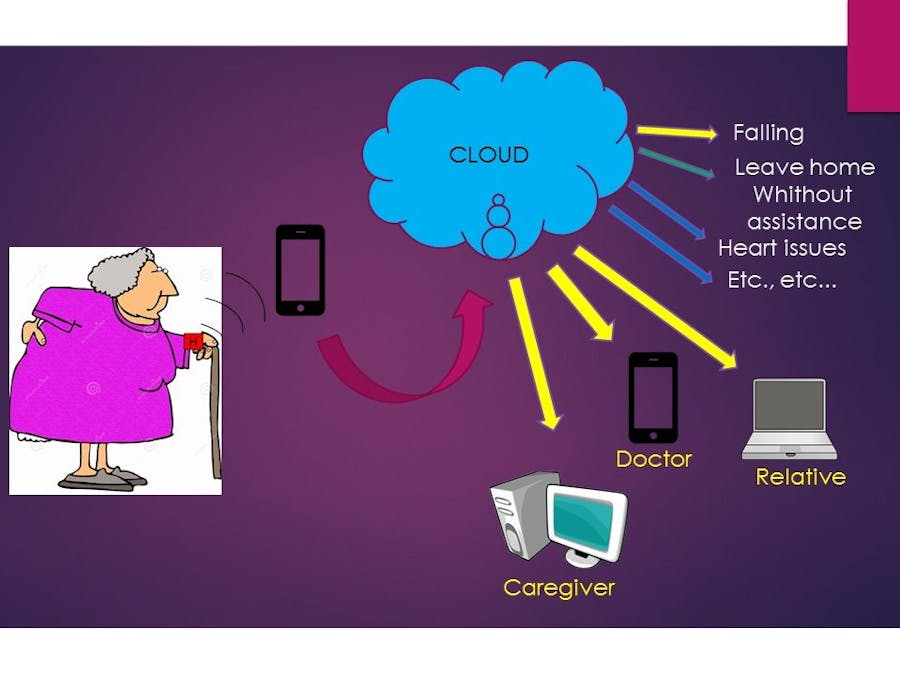
My Project is focused on ederly people who lives alone. The hexiwear will be carried by the ederly all the time and will be connected to a smartphone that will have an application that will monitor the sensors from hexiwear and send these informations to the cloud generating not only information, but alerts, warnings and emergency conditions alarms. These informations, alerts, alarms could be sent to Medical Doctors, Nurses, Caregivers, Emergency Services and Relatives.
The hexiwear has a heart frequency sensor that could, together with the accelerometer, make a heart beat measure, a non precise, but valuable electrocardiogram and breath rhythm and depth. And with these sensors, the platform will monitor if the elderly falls. It will be available to inside or outside of a house apartment or condo, if is moving or not and, if not, if not moving for so long. Also, it can check the sleep quality and condition according with moves during sleep.
IdeationI decided to do it because I saw many elderly people dying alone and sometimes only be discovered dead after days because of the smell. Maybe if they had this device, they could be attended by an emergency service and it could save their lives. Also, we have devices like this in medical environment, but they are very expensive to be used by the poor people, so, developing something with Hexiwear could reduce a lot the price make it accessible for almost all the population.
Although I tried to hurry with this project, I didn't have the same time the other participants had, I just enter in the contest with the opening of a second chance to get the Hexiwear kit. I thank very much the organizer that liked my peoject and sent one kit to me and I apologize for not be able to complete all the functionalities in time to submit as I wished.
The development of this solution will continue and I will publish them as soon as I'm able to finish.
Hexiwear sensor's info and status (Normal or Alarm)
The equation i ssimple, I got the module of the vector of the coordinates x, y and z and if this vector result is 1 or more, it indicates that one gravity movement was reached (in any direction). this behavior could hurt the elderly.
- Hexiwear Code to read sensors and send through Serial.
- Python code to read serial port of the laptop to get the sensors information from Hexiwear
- Information from sensors example.
- Python code to write to Artik Cloud
- Hexiwear Code to read sensors and send through Serial Version not finished
- Final code on Hexiwear
- Final Code on Laptop
Hexiwear Code to read sensors and send through Serial.
C/C++#include "mbed.h"
#include "FXAS21002.h"
#include "FXOS8700.h"
#include "MPL3115A2.h"
/* Check out the full featured example application for interfacing to the
* Gyro device at the following URL
* https://developer.mbed.org/teams/ATT-Hackathon/code/Accel_Mag_Gyro_SensorStream_K64F_AGM01_M/
*/
//#define MPL3115A2_I2C_ADDRESS (0x60<<1)
DigitalOut led1(LED_RED);
Serial pc(USBTX, USBRX);
// Pin connections & address for Hexiwear
FXOS8700 accel(PTC11, PTC10);
FXOS8700 mag(PTC11, PTC10);
FXAS21002 gyro(PTC11,PTC10);
//MPL3115A2 MPL3115A2( PTC11, PTC10, MPL3115A2_I2C_ADDRESS);
/* pos [0] = altimeter or pressure value */
/* pos [1] = temperature value */
DigitalOut led2(LED_BLUE);
// Storage for the data from the sensor
float gyro_data[3]; float gyro_rms=0.0;
float sensor_data[2];
// I2C i2c(p9, p10); // sda, scl
// MPL115A2 p_sensor(&i2c, &pc); //DEBUG verion
// MPL115A2 p_sensor(&i2c);
// main() runs in its own thread in the OS
// (note the calls to Thread::wait below for delays)
int main() {
DigitalOut led3(LED_GREEN);
// Set over sampling value (see MPL3115A2.h for details)
// MPL3115A2.Oversample_Ratio(OVERSAMPLE_RATIO_64);
// Configure the sensor as Barometer.
// MPL3115A2.Barometric_Mode();
// Configure Accelerometer FXOS8700, Magnetometer FXOS8700
// Configure Gyro FXAS21002
float accel_data[3]; float accel_rms=0.0;
float mag_data[3]; float mag_rms=0.0;
float accelalarm = 0.0;
float gyroalarm = 0.0;
accel.accel_config();
mag.mag_config();
gyro.gyro_config();
while (true) {
gyro.acquire_gyro_data_dps(gyro_data);
pc.printf("Gyroscope\r\nRoll(G)%4.4f\r\nPitch(G)%4.4f\r\nYaw(G)%4.4f\r\n",gyro_data[0],gyro_data[1],gyro_data[2]);
gyro_rms = sqrt(((gyro_data[0]*gyro_data[0])+(gyro_data[1]*gyro_data[1])+(gyro_data[2]*gyro_data[2]))/3);
pc.printf("RMS(G)%4.4f\r\n\n",gyro_rms);
accel.acquire_accel_data_g(accel_data);
accel_rms = sqrt(((accel_data[0]*accel_data[0])+(accel_data[1]*accel_data[1])+(accel_data[2]*accel_data[2]))/3);
printf("Accelerometer\r\nX-Axis(G)%4.4f\r\nY-Axis(G)%4.4f\r\nZ-Axis(G)%4.4f\r\nRMS(G)%4.4f\r\n\n",accel_data[0],accel_data[1],accel_data[2],accel_rms);
mag.acquire_mag_data_uT(mag_data);
mag_rms = sqrt(((mag_data[0]*mag_data[0])+(mag_data[1]*mag_data[1])+(mag_data[2]*mag_data[2]))/3);
printf("Magnetometer\r\nX-Axis(T)%4.4f\r\nY-Axis(T)%4.4f\r\nZ-Axis(T)%4.4f\r\nRMS(T)%4.4f ,\r\n\n",mag_data[0],mag_data[1],mag_data[2],mag_rms);
// MPL3115A2.getAllData(&sensor_data[0]);
// printf("Pressure ,\r\n%f \r\nTemperature ,\r\n%f\n", sensor_data[0], sensor_data[1]);
printf("accelalarm:%4.4f accel_rms:%4.4f gyroalarm:%4.4f gyro_rms:%4.4f\n",accelalarm,accel_rms,gyroalarm,gyro_rms);
accelalarm = accelalarm-accel_rms;
gyroalarm = gyroalarm-gyro_rms;
accelalarm = sqrt(accelalarm*accelalarm);
gyroalarm = sqrt(gyroalarm*gyroalarm);
printf("\rAccel:%4.4f Gyro:%4.4f \n\n", accelalarm,gyroalarm);
if (accelalarm <= 1)
printf("\n\nNormal\n\n");
else
printf("\n\nALARM!!!!!!!\n\n");
led1 = !led1;
}
}
Python code to read serial port of the laptop to get the sensors information from Hexiwear
Pythonimport serial
ser = serial.Serial(
port='COM5',\
baudrate=9600,\
parity=serial.PARITY_NONE,\
stopbits=serial.STOPBITS_ONE,\
bytesize=serial.EIGHTBITS,\
timeout=0)
print("connected to: " + ser.portstr)
#this will store the line
seq = []
count = 1
while True:
for c in ser.read():
seq.append(chr(c)) #convert from ANSII
joined_seq = ''.join(str(v) for v in seq) #Make a string from array
if chr(c) == '\n':
# print("Line " + str(count) + ': ' + joined_seq)
print(joined_seq)
seq = []
count += 1
break
ser.close()
Information from sensors example.
Plain textconnected to: COM5
6644 gyro_rms:0.9520
Accel:0.0277 Gyro:0.2876
Gyroscope
Roll(G)-0.4375
Pitch(G)-0.1250
Yaw(G)-0.3750
RMS(G)0.3404
Accelerometer
X-Axis(G)0.0137
Y-Axis(G)0.0410
Z-Axis(G)-0.9941
RMS(G)0.5745
Magnetometer
X-Axis(T)-290.3000
Y-Axis(T)-49.1000
Z-Axis(T)-70.3000
RMS(T)174.7636 ,
accelalarm:0.0000 accel_rms:0.5745 gyroalarm:0.0000 gyro_rms:0.3404
Accel:0.5745 Gyro:0.3404
Normal
Gyroscope
Roll(G)-0.7500
Pitch(G)0.8125
Yaw(G)0.1875
RMS(G)0.6475
Accelerometer
X-Axis(G)0.0156
Y-Axis(G)0.0342
Z-Axis(G)-0.9862
RMS(G)0.5698
Magnetometer
X-Axis(T)-288.3000
Y-Axis(T)-49.8000
Z-Axis(T)-67.4000
RMS(T)173.3394 ,
accelalarm:0.5745 accel_rms:0.5698 gyroalarm:0.3404 gyro_rms:0.6475
Accel:0.0046 Gyro:0.3071
Normal
Gyroscope
Roll(G)-0.8750
Pitch(G)1.1875
Yaw(G)-0.5625
RMS(G)0.9114
Accelerometer
X-Axis(G)0.0088
Y-Axis(G)0.0381
Z-Axis(G)-0.9804
RMS(G)0.5665
Magnetometer
X-Axis(T)-291.5000
Y-Axis(T)-49.4000
Z-Axis(T)-70.0000
RMS(T)175.4163 ,
accelalarm:0.0046 accel_rms:0.5665 gyroalarm:0.3071 gyro_rms:0.9114
Accel:0.5618 Gyro:0.6044
Normal
Gyroscope
Roll(G)-0.7500
Pitch(G)0.8125
Yaw(G)-0.0625
RMS(G)0.6394
Accelerometer
X-Axis(G)0.0122
Y-Axis(G)0.0371
Z-Axis(G)-0.9833
RMS(G)0.5682
Magnetometer
X-Axis(T)-289.7000
Y-Axis(T)-49.9000
Z-Axis(T)-68.2000
RMS(T)174.2291 ,
accelalarm:0.5618 accel_rms:0.5682 gyroalarm:0.6044 gyro_rms:0.6394
Accel:0.0063 Gyro:0.0351
Normal
Gyroscope
Roll(G)-0.8125
Pitch(G)1.1250
Yaw(G)-0.3125
RMS(G)0.8213
Accelerometer
X-Axis(G)0.0063
Y-Axis(G)0.0361
Z-Axis(G)-0.9789
RMS(G)0.5656
Magnetometer
X-Axis(T)-288.6000
Y-Axis(T)-48.9000
Z-Axis(T)-65.8000
RMS(T)173.2155 ,
accelalarm:0.0063 accel_rms:0.5656 gyroalarm:0.0351 gyro_rms:0.8213
Accel:0.5593 Gyro:0.7862
Normal
Gyroscope
Roll(G)-1.0000
Pitch(G)0.9375
Yaw(G)-0.1875
RMS(G)0.7988
Accelerometer
X-Axis(G)0.0093
Y-Axis(G)0.0410
Z-Axis(G)-0.9838
RMS(G)0.5685
Magnetometer
X-Axis(T)-288.3000
Y-Axis(T)-47.3000
Z-Axis(T)-71.0000
RMS(T)173.5849 ,
accelalarm:0.5593 accel_rms:0.5685 gyroalarm:0.7862 gyro_rms:0.7988
Accel:0.0093 Gyro:0.0126
Normal
Gyroscope
Roll(G)-0.4375
Pitch(G)0.7500
Yaw(G)-0.2500
RMS(G)0.5217
Accelerometer
X-Axis(G)0.0107
Y-Axis(G)0.0356
Z-Axis(G)-0.9799
RMS(G)0.5662
Magnetometer
X-Axis(T)-287.6000
Y-Axis(T)-49.3000
Z-Axis(T)-68.7000
RMS(T)173.0741 ,
accelalarm:0.0093 accel_rms:0.5662 gyroalarm:0.0126 gyro_rms:0.5217
Accel:0.5569 Gyro:0.5091
Normal
Gyroscope
Roll(G)-1.0000
Pitch(G)1.5000
Yaw(G)0.0000
RMS(G)1.0408
Accelerometer
X-Axis(G)0.0073
Y-Axis(G)0.0361
Z-Axis(G)-0.9828
RMS(G)0.5678
Magnetometer
X-Axis(T)-288.2000
Y-Axis(T)-51.1000
Z-Axis(T)-69.8000
RMS(T)173.7263 ,
accelalarm:0.5569 accel_rms:0.5678 gyroalarm:0.5091 gyro_rms:1.0408
Accel:0.0109 Gyro:0.5317
Normal
Gyroscope
Roll(G)-0.6250
Pitch(G)1.3750
Yaw(G)-0.4375
RMS(G)0.9079
Accelerometer
X-Axis(G)0.0068
Y-Axis(G)0.0337
Z-Axis(G)-0.9843
RMS(G)0.5686
Magnetometer
X-Axis(T)-287.0000
Y-Axis(T)-50.2000
Z-Axis(T)-68.2000
RMS(T)172.7621 ,
accelalarm:0.0109 accel_rms:0.5686 gyroalarm:0.5317 gyro_rms:0.9079
Accel:0.5577 Gyro:0.3761
Normal
Gyroscope
Roll(G)-1.1250
Pitch(G)0.7500
Yaw(G)-0.1250
RMS(G)0.7840
Accelerometer
X-Axis(G)0.0098
Y-Axis(G)0.0381
Z-Axis(G)-0.9867
RMS(G)0.5701
Magnetometer
X-Axis(T)-286.7000
Y-Axis(T)-49.6000
Z-Axis(T)-69.2000
RMS(T)172.6709 ,
accelalarm:0.5577 accel_rms:0.5701 gyroalarm:0.3761 gyro_rms:0.7840
Accel:0.0125 Gyro:0.4078
Normal
Gyroscope
Roll(G)-1.0000
Pitch(G)0.6250
Yaw(G)-0.1250
RMS(G)0.6847
Accelerometer
X-Axis(G)0.0112
Y-Axis(G)0.0371
Z-Axis(G)-0.9867
RMS(G)0.5701
Magnetometer
X-Axis(T)-288.6000
Y-Axis(T)-49.6000
Z-Axis(T)-68.5000
RMS(T)173.6302 ,
accelalarm:0.0125 accel_rms:0.5701 gyroalarm:0.4078 gyro_rms:0.6847
Accel:0.5577 Gyro:0.2768
Normal
Gyroscope
Roll(G)-0.3750
Pitch(G)1.1875
Yaw(G)-0.3125
RMS(G)0.7413
Accelerometer
X-Axis(G)0.0068
Y-Axis(G)0.0429
Z-Axis(G)-0.9814
RMS(G)0.5671
Magnetometer
X-Axis(T)-290.9000
Y-Axis(T)-52.0000
Z-Axis(T)-69.8000
RMS(T)175.3082 ,
accelalarm:0.5577 accel_rms:0.5671 gyroalarm:0.2768 gyro_rms:0.7413
Accel:0.0095 Gyro:0.4644
Normal
Gyroscope
Roll(G)-0.9375
Pitch(G)0.9375
Yaw(G)0.0625
RMS(G)0.7663
Accelerometer
X-Axis(G)0.0146
Y-Axis(G)0.0410
Z-Axis(G)-0.9887
RMS(G)0.5714
Magnetometer
X-Axis(T)-287.8000
Y-Axis(T)-48.9000
Z-Axis(T)-68.0000
RMS(T)173.0549 ,
accelalarm:0.0095 accel_rms:0.5714 gyroalarm:0.4644 gyro_rms:0.7663
Accel:0.5619 Gyro:0.3019
Normal
Gyroscope
Roll(G)-0.9375
Pitch(G)1.0625
Yaw(G)-0.1875
RMS(G)0.8252
Accelerometer
X-Axis(G)0.0088
Y-Axis(G)0.0342
Z-Axis(G)-0.9906
RMS(G)0.5723
Magnetometer
X-Axis(T)-290.3000
Y-Axis(T)-49.3000
Z-Axis(T)-66.4000
RMS(T)174.2733 ,
accelalarm:0.5619 accel_rms:0.5723 gyroalarm:0.3019 gyro_rms:0.8252
Accel:0.0104 Gyro:0.5233
Normal
Gyroscope
Roll(G)-0.9375
Pitch(G)1.3125
Yaw(G)-0.1875
RMS(G)0.9375
Accelerometer
X-Axis(G)-0.0166
Y-Axis(G)0.0381
Z-Axis(G)-0.9614
RMS(G)0.5556
Magnetometer
X-Axis(T)-289.3000
Y-Axis(T)-50.9000
Z-Axis(T)-68.4000
RMS(T)174.1301 ,
accelalarm:0.0104 accel_rms:0.5556 gyroalarm:0.5233 gyro_rms:0.9375
Accel:0.5451 Gyro:0.4142
Normal
Gyroscope
Roll(G)80.9375
...
This file has been truncated, please download it to see its full contents.
Python code to write to Artik Cloud
Pythonimport argparse
import artikcloud
from artikcloud.rest import ApiException
import sys, getopt
import time, random, json
from pprint import pprint
# SDK reference for more details
# https://github.com/artikcloud/artikcloud-python
parser = argparse.ArgumentParser(description='Read from LeSerial.PY')
parser.add_argument('-a','--accellRMS', help='Float value of accelleration', required=True)
parser.add_argument('-f','--fall', help='Alarm of falling', required=True)
args = vars(parser.parse_args())
def main(argv):
DEFAULT_CONFIG_PATH = 'C:/Users/anton/Documents/Hexiwear/config.json'
with open(DEFAULT_CONFIG_PATH, 'r') as config_file:
config = json.load(config_file)['LaDeVo']
print(config)
# Configure Oauth2 access_token for the client application. Here we have used
# the device token for the configuration
artikcloud.configuration = artikcloud.Configuration();
artikcloud.configuration.access_token = config['deviceToken']
# We create an instance of the Message API class which provides
# the send_message() and get_last_normalized_messages() api call
# for our example
api_instance = artikcloud.MessagesApi()
# Device_message - data that is sent to your device
device_message = {}
# We send random values to the 'temp' field for this FireSensor.
# Let's send a random value between 0 and 200 for this demo.
#device_message['accellRMS'] = random.randrange(0,200);
device_message['accellRMS'] = args['accellRMS'];
device_message['fall'] = args['fall'];
# Set the 'device id' - value from your config.json file
device_sdid = config['deviceId']
# set your custom timestamp
ts = None
# Construct a Message object for your request
data = artikcloud.Message(device_message, device_sdid, ts)
try:
# Debug Print oauth settings
pprint(artikcloud.configuration.auth_settings())
# Send Message
api_response = api_instance.send_message(data)
pprint(api_response)
except ApiException as e:
print("Exception when calling MessagesApi->send_message: %s\n" % e)
if __name__ == "__main__":
main(sys.argv[1:])
Hexiwear Code to read sensors and send through Serial Version not finished
Pythonimport serial
import subprocess
import time
ser = serial.Serial(
port='COM5',\
baudrate=9600,\
parity=serial.PARITY_NONE,\
stopbits=serial.STOPBITS_ONE,\
bytesize=serial.EIGHTBITS,\
timeout=0)
print("connected to: " + ser.portstr)
#this will store the line
seq = []
count = 1
rms = 0.0
fall = 0.0
n = 0
x = 0
while True:
for c in ser.read():
seq.append(chr(c)) #convert from ANSII
#joined_seq = ''.join(str(v) for v in seq) #Make a string from array
joined_seq = ''.join(str(v) for v in seq) #Make a string from array
if chr(c) == '\n':
#print("Line " + str(count) + ': ' + joined_seq)
if joined_seq == "N\n":
print('Alarm!!!!')
fall = int(1)
n = 1000
else:
#print(joined_seq[:6])
rms = joined_seq[:6]
rms = float(rms)
rms = rms * 10000.0
print(int(round(rms)))
rms = int(round(rms))
seq = []
count += 1
break
#comando = ['C:/Anaconda3/python.exe']
comando = ['C:/Anaconda3/python.exe C:/Users/anton/Documents/Hexiwear/LaDeVo.py -a ',fall,' -f ',rms]
if n == 1000 :
subprocess.Popen('C:/Anaconda3/python.exe C:/Users/anton/Documents/Hexiwear/LaDeVo.py -a ',rms,' -f ',fall)
n = 0
x = 0
while x < 10000:
x += 1
n += 1
ser.close()
Final code on Hexiwear
C/C++#include "mbed.h"
#include "FXAS21002.h"
#include "FXOS8700.h"
#include "MPL3115A2.h"
/* Check out the full featured example application for interfacing to the
* Gyro device at the following URL
* https://developer.mbed.org/teams/ATT-Hackathon/code/Accel_Mag_Gyro_SensorStream_K64F_AGM01_M/
*/
//#define MPL3115A2_I2C_ADDRESS (0x60<<1)
DigitalOut led1(LED_RED);
Serial pc(USBTX, USBRX);
// Pin connections & address for Hexiwear
FXOS8700 accel(PTC11, PTC10);
FXOS8700 mag(PTC11, PTC10);
FXAS21002 gyro(PTC11,PTC10);
//MPL3115A2 MPL3115A2( PTC11, PTC10, MPL3115A2_I2C_ADDRESS);
/* pos [0] = altimeter or pressure value */
/* pos [1] = temperature value */
DigitalOut led2(LED_BLUE);
// Storage for the data from the sensor
float gyro_data[3]; float gyro_rms=0.0;
float sensor_data[2];
// I2C i2c(p9, p10); // sda, scl
// MPL115A2 p_sensor(&i2c, &pc); //DEBUG verion
// MPL115A2 p_sensor(&i2c);
// main() runs in its own thread in the OS
// (note the calls to Thread::wait below for delays)
int main() {
DigitalOut led3(LED_GREEN);
// Set over sampling value (see MPL3115A2.h for details)
// MPL3115A2.Oversample_Ratio(OVERSAMPLE_RATIO_64);
// Configure the sensor as Barometer.
// MPL3115A2.Barometric_Mode();
// Configure Accelerometer FXOS8700, Magnetometer FXOS8700
// Configure Gyro FXAS21002
float accel_data[3]; float accel_rms=0.0;
float mag_data[3]; float mag_rms=0.0;
float accelalarm = 0.0;
float gyroalarm = 0.0;
accel.accel_config();
mag.mag_config();
gyro.gyro_config();
while (true) {
/* gyro.acquire_gyro_data_dps(gyro_data);
pc.printf("Gyroscope\r\nRoll(G)%4.4f\r\nPitch(G)%4.4f\r\nYaw(G)%4.4f\r\n",gyro_data[0],gyro_data[1],gyro_data[2]);
gyro_rms = sqrt(((gyro_data[0]*gyro_data[0])+(gyro_data[1]*gyro_data[1])+(gyro_data[2]*gyro_data[2]))/3);
pc.printf("RMS(G)%4.4f\r\n\n",gyro_rms); */
accel.acquire_accel_data_g(accel_data);
accel_rms = sqrt(((accel_data[0]*accel_data[0])+(accel_data[1]*accel_data[1])+(accel_data[2]*accel_data[2]))/3);
// printf("Accelerometer\r\nX-Axis(G)%4.4f\r\nY-Axis(G)%4.4f\r\nZ-Axis(G)%4.4f\r\nRMS(G)%4.4f\r\n\n",accel_data[0],accel_data[1],accel_data[2],accel_rms);
/* mag.acquire_mag_data_uT(mag_data);
mag_rms = sqrt(((mag_data[0]*mag_data[0])+(mag_data[1]*mag_data[1])+(mag_data[2]*mag_data[2]))/3);
printf("Magnetometer\r\nX-Axis(T)%4.4f\r\nY-Axis(T)%4.4f\r\nZ-Axis(T)%4.4f\r\nRMS(T)%4.4f ,\r\n\n",mag_data[0],mag_data[1],mag_data[2],mag_rms);
// MPL3115A2.getAllData(&sensor_data[0]);
// printf("Pressure ,\r\n%f \r\nTemperature ,\r\n%f\n", sensor_data[0], sensor_data[1]);
printf("accelalarm:%4.4f accel_rms:%4.4f gyroalarm:%4.4f gyro_rms:%4.4f\n",accelalarm,accel_rms,gyroalarm,gyro_rms);
*/
accelalarm = accelalarm-accel_rms;
// gyroalarm = gyroalarm-gyro_rms;
accelalarm = sqrt(accelalarm*accelalarm);
// gyroalarm = sqrt(gyroalarm*gyroalarm);
// printf("\rAccel:%4.4f Gyro:%4.4f \n\n", accelalarm,gyroalarm);
printf("%4.4f\n", accelalarm);
if (accelalarm > 1)
while(true){
printf("N\n");
// else
// printf("1\n");
}
led1 = !led1;
led2 = !led2;
led3 = !led3;
}
}
Final Code on Laptop
Pythonimport serial
import artikcloud
from artikcloud.rest import ApiException
import sys
import json
from pprint import pprint
ser = serial.Serial(
port='COM5',\
baudrate=9600,\
parity=serial.PARITY_NONE,\
stopbits=serial.STOPBITS_ONE,\
bytesize=serial.EIGHTBITS,\
timeout=0)
print("connected to: " + ser.portstr)
#this will store the line
seq = []
count = 1
rms = 0.0
fall = 0
while True:
for c in ser.read():
seq.append(chr(c)) #convert from ANSII
#joined_seq = ''.join(str(v) for v in seq) #Make a string from array
joined_seq = ''.join(str(v) for v in seq) #Make a string from array
if chr(c) == '\n':
#print("Line " + str(count) + ': ' + joined_seq)
if joined_seq == "N\n":
print('Alarm!!!!')
fall = 1
else:
rms = joined_seq
print (joined_seq)
seq = []
count += 1
break
def main(argv):
DEFAULT_CONFIG_PATH = 'C:/Users/anton/Documents/Hexiwear/config.json'
with open(DEFAULT_CONFIG_PATH, 'r') as config_file:
config = json.load(config_file)['LaDeVo']
print(config)
# Configure Oauth2 access_token for the client application. Here we have used
# the device token for the configuration
artikcloud.configuration = artikcloud.Configuration();
artikcloud.configuration.access_token = config['deviceToken']
# We create an instance of the Message API class which provides
# the send_message() and get_last_normalized_messages() api call
# for our example
api_instance = artikcloud.MessagesApi()
# Device_message - data that is sent to your device
device_message = {}
# We send random values to the 'temp' field for this FireSensor.
# Let's send a random value between 0 and 200 for this demo.
#device_message['accellRMS'] = random.randrange(0,200);
device_message['accellRMS'] = rms;
if fall == 0 :
device_message['fall'] = '';
else :
device_message['fall'] = 'true';
# Set the 'device id' - value from your config.json file
device_sdid = config['deviceId']
# set your custom timestamp
ts = None
# Construct a Message object for your request
data = artikcloud.Message(device_message, device_sdid, ts)
try:
# Debug Print oauth settings
pprint(artikcloud.configuration.auth_settings())
# Send Message
api_response = api_instance.send_message(data)
pprint(api_response)
except ApiException as e:
print("Exception when calling MessagesApi->send_message: %s\n" % e)
if __name__ == "__main__":
main(sys.argv[1:])
ser.close()





Comments