


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 9 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
The story
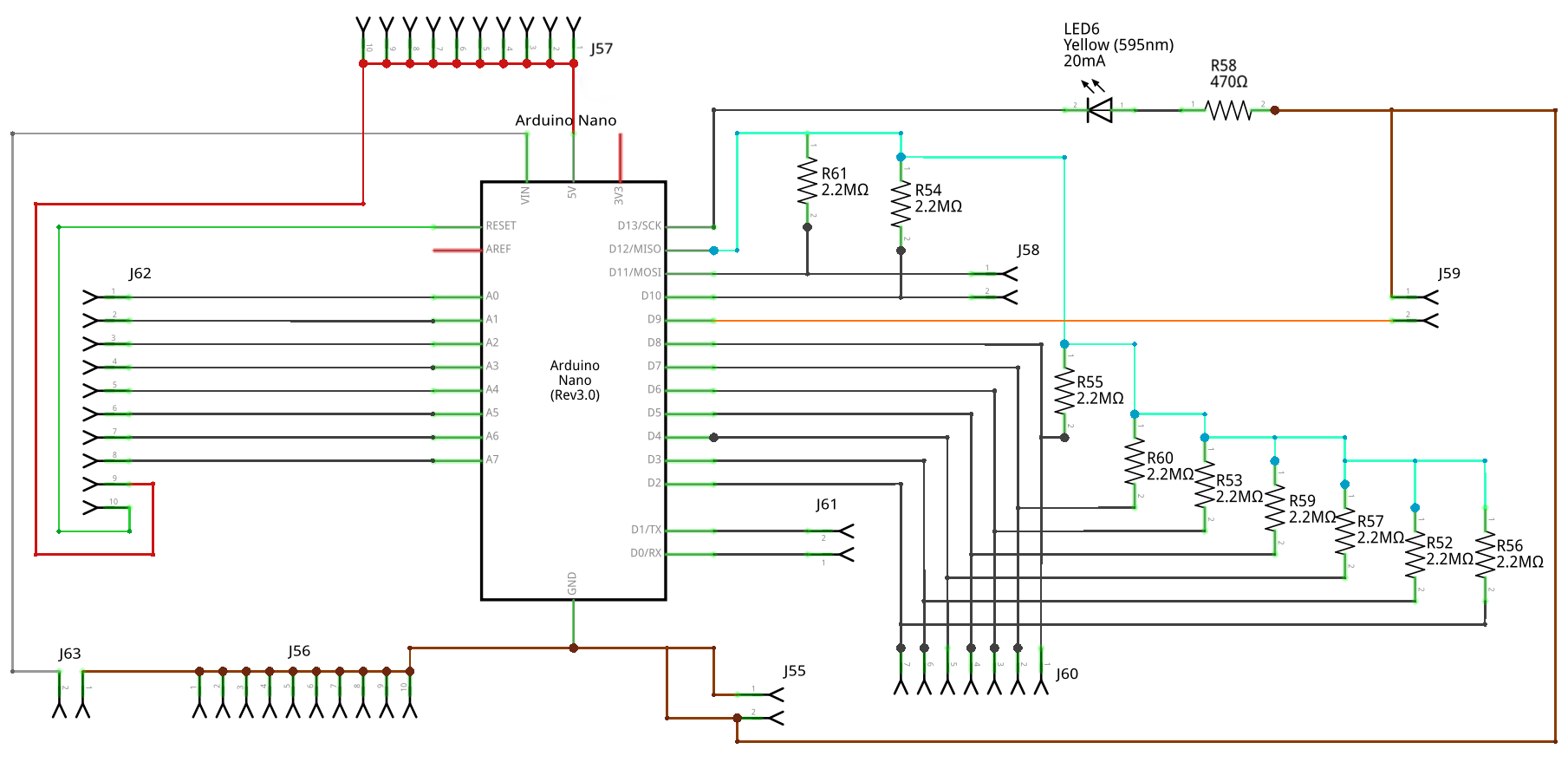
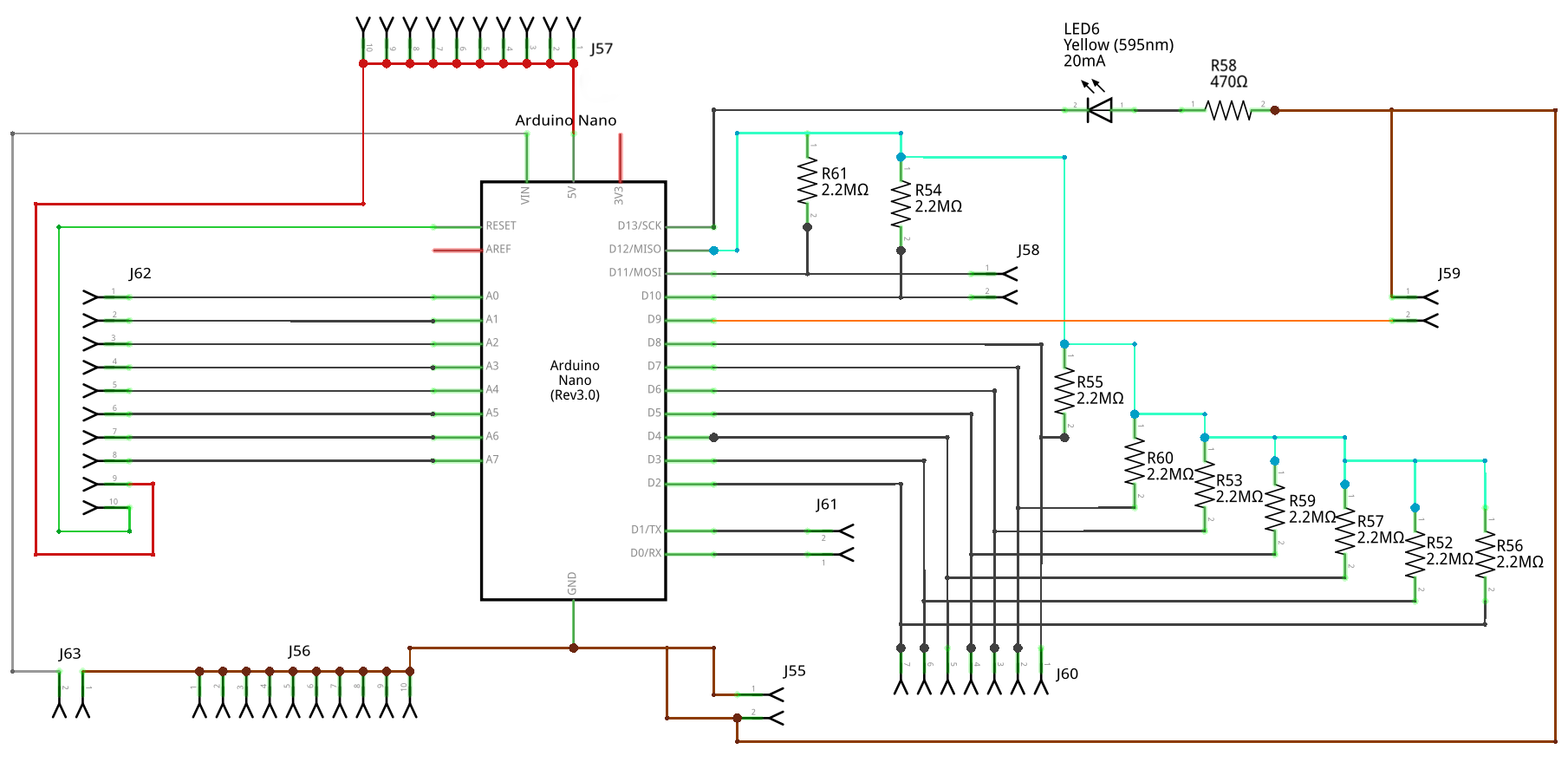
The board makes it possible to connect up to nine different conductive objects; also, it has eight analog inputs that can be used to connect potentiometers or other types of sensors.
If connected to a laptop, the board sends the data relating the state of the sensors via the serial connection. Currently, CapBoard has been interfaced with pure data and processing through a special Arduino sketch (available soon on this page).
Visit the main page of CapBoard on artislab.it
CapBoard is also available on Tindie
You can try to invent new ways to interact with your laptop.
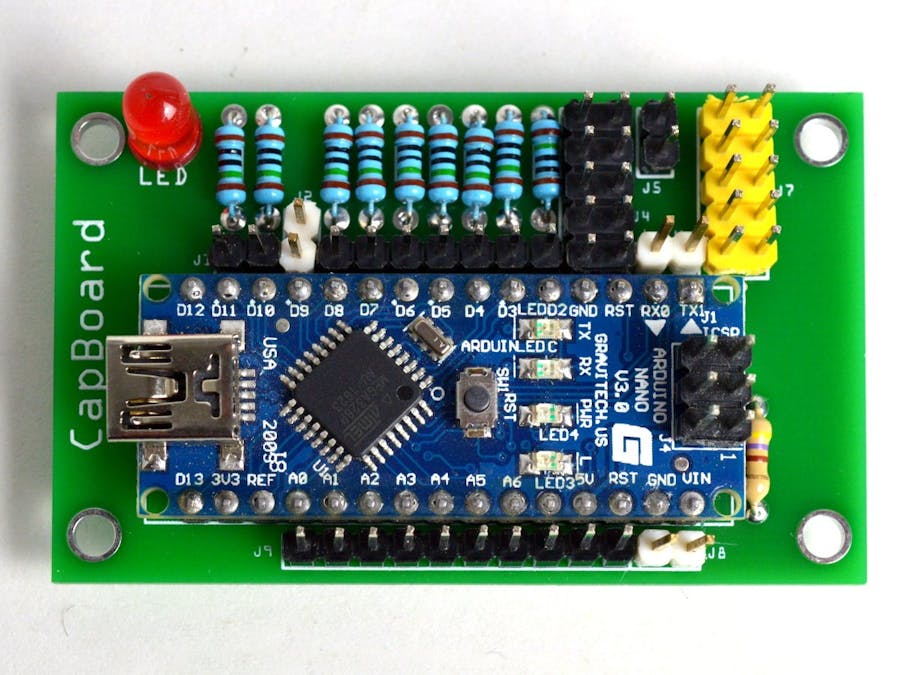
The board is equipped with an LED connected to the digital port number 12, while port 13 is free and can be used to connect a speaker or an audio cable to generate sounds through the Arduino tone() function.
Here the first prototype of CapBoard.
Programming CapBoard:
You can create an 8-bit synth controlled by touching the objects connect to the card. Obviously, it can also be connected to any other environment or software capable of receiving data via a serial connection.
Capacitive sensors to be connected to CapBoard can be made with aluminum foil, as those used for the prototype CapPad, or you can use any other metal objects as shown in the image.
This video shows an interactive sound installation in which CapBoard was used to make sensitive four tuff blocks. The installation has been set up for the exhibition Attraverso la città: La strada del Sole at San Nicola dei Greci in Matera from December 10, 2016 to February 12, 2017.
T
To program the CapBoard, you need to use the Arduino CapacitiveSensor library. For more information, refer to the official project page.
Buy now your CapBoard following this link or, for more information about the board, write us at info@artislab.it.

{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.