


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
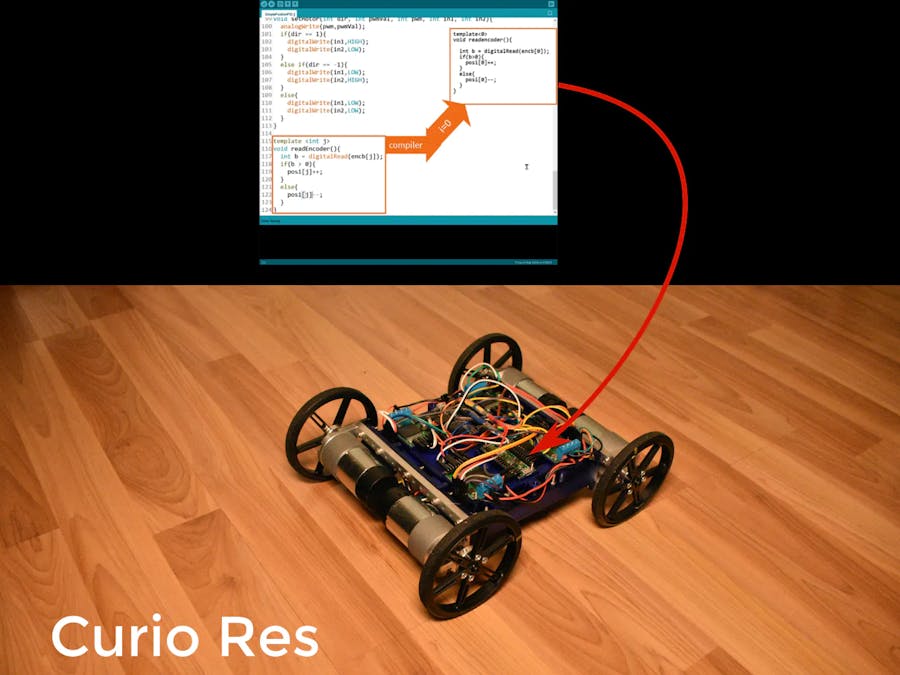
In this tutorial, you'll learn how to connect and write code to control several DC motors with encoders using the PID algorithm. You can watch a full walk-through in the video below.
Code:
https://github.com/curiores/ArduinoTutorials/blob/master/MultipleEncoders/SimplePositionPID.ino
#include <util/atomic.h>
// A class to compute the control signal
class SimplePID{
private:
float kp, kd, ki, umax; // Parameters
float eprev, eintegral; // Storage
public:
// Constructor
SimplePID() : kp(1), kd(0), ki(0), umax(255), eprev(0.0), eintegral(0.0){}
// A function to set the parameters
void setParams(float kpIn, float kdIn, float kiIn, float umaxIn){
kp = kpIn; kd = kdIn; ki = kiIn; umax = umaxIn;
}
// A function to compute the control signal
void evalu(int value, int target, float deltaT, int &pwr, int &dir){
// error
int e = target - value;
// derivative
float dedt = (e-eprev)/(deltaT);
// integral
eintegral = eintegral + e*deltaT;
// control signal
float u = kp*e + kd*dedt + ki*eintegral;
// motor power
pwr = (int) fabs(u);
if( pwr > umax ){
pwr = umax;
}
// motor direction
dir = 1;
if(u<0){
dir = -1;
}
// store previous error
eprev = e;
}
};
// How many motors
#define NMOTORS 2
// Pins
const int enca[] = {0,1};
const int encb[] = {4,5};
const int pwm[] = {9,13};
const int in1[] = {8,11};
const int in2[] = {10,12};
// Globals
long prevT = 0;
volatile int posi[] = {0,0};
// PID class instances
SimplePID pid[NMOTORS];
void setup() {
Serial.begin(9600);
for(int k = 0; k < NMOTORS; k++){
pinMode(enca[k],INPUT);
pinMode(encb[k],INPUT);
pinMode(pwm[k],OUTPUT);
pinMode(in1[k],OUTPUT);
pinMode(in2[k],OUTPUT);
pid[k].setParams(1,0,0,255);
}
attachInterrupt(digitalPinToInterrupt(enca[0]),readEncoder<0>,RISING);
attachInterrupt(digitalPinToInterrupt(enca[1]),readEncoder<1>,RISING);
Serial.println("target pos");
}
void loop() {
// set target position
int target[NMOTORS];
target[0] = 750*sin(prevT/1e6);
target[1] = -750*sin(prevT/1e6);
// time difference
long currT = micros();
float deltaT = ((float) (currT - prevT))/( 1.0e6 );
prevT = currT;
// Read the position in an atomic block to avoid a potential misread
int pos[NMOTORS];
ATOMIC_BLOCK(ATOMIC_RESTORESTATE){
for(int k = 0; k < NMOTORS; k++){
pos[k] = posi[k];
}
}
// loop through the motors
for(int k = 0; k < NMOTORS; k++){
int pwr, dir;
// evaluate the control signal
pid[k].evalu(pos[k],target[k],deltaT,pwr,dir);
// signal the motor
setMotor(dir,pwr,pwm[k],in1[k],in2[k]);
}
for(int k = 0; k < NMOTORS; k++){
Serial.print(target[k]);
Serial.print(" ");
Serial.print(pos[k]);
Serial.print(" ");
}
Serial.println();
}
void setMotor(int dir, int pwmVal, int pwm, int in1, int in2){
analogWrite(pwm,pwmVal);
if(dir == 1){
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
}
else if(dir == -1){
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
}
else{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
}
}
template <int j>
void readEncoder(){
int b = digitalRead(encb[j]);
if(b > 0){
posi[j]++;
}
else{
posi[j]--;
}
}
#include <util/atomic.h>
#include <Wire.h>
#include <math.h>
/*------------ CLASS ------------*/
class SimplePID{
private:
float kp, kd, ki, umax;
float eprev, eintegral;
public:
// Default initialization list
SimplePID() : kp(1), kd(0), ki(0), umax(255), eprev(0.0), eintegral(0.0) {}
// Set the parameters
void setParams(float kpIn, float kdIn, float kiIn, float umaxIn){
kp = kpIn; kd = kdIn; ki = kiIn; umax = umaxIn;
}
// Evaluate the signal
void evalu(int value, int target, float deltaT,int &pwr, int &dir){
// error
int e = target - value;
float dedt = (e-eprev)/(deltaT);
eintegral = eintegral + e*deltaT;
float u = kp*e + kd*dedt + ki*eintegral;
// motor power
pwr = (int) fabs(u);
if( pwr > umax ){
pwr = umax;
}
// motor direction
dir = 1;
if(u<0){
dir = -1;
}
// store previous error
eprev = e;
}
};
/*------------ GLOBALS AND DEFINITIONS ------------*/
// Define the motors
#define NMOTORS 2
#define M0 0
#define M1 1
const int enca[] = {0,1};
const int encb[]= {4,5};
const int pwm[] = {9,13};
const int in1[] = {8,11};
const int in2[] = {10,12};
// Global variables
long prevT = 0;
int posPrev[] = {0,0};
// positions
volatile int posi[] = {0,0};
// PID classes
SimplePID pid[NMOTORS];
/*------------ FUNCTIONS ------------*/
void setMotor(int dir, int pwmVal, int pwm, int in1, int in2){
analogWrite(pwm,pwmVal);
if(dir == 1){
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
}
else if(dir == -1){
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
}
else{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
}
}
template <int j>
void readEncoder(){
int b = digitalRead(encb[j]);
if(b > 0){
posi[j]++;
}
else{
posi[j]--;
}
}
void sendLong(long value){
for(int k=0; k<4; k++){
byte out = (value >> 8*(3-k)) & 0xFF;
Wire.write(out);
}
}
long receiveLong(){
long outValue;
for(int k=0; k<4; k++){
byte nextByte = Wire.read();
outValue = (outValue << 8) | nextByte;
}
return outValue;
}
// targets
float target_f[] = {0,0,0,0};
long target[] = {0,0,0,0};
void setTarget(float t, float deltat){
float positionChange[4] = {0.0,0.0,0.0,0.0};
float pulsesPerTurn = 16*18.75;
float pulsesPerMeter = pulsesPerTurn*3.5368;
t = fmod(t,12); // time is in seconds
float velocity = 0.25; // m/s
if(t < 4){
}
else if(t < 8){
for(int k = 0; k < 4; k++){
positionChange[k] = velocity*deltat*pulsesPerMeter;
}
}
else{
for(int k = 0; k < 4; k++){
positionChange[k] = -velocity*deltat*pulsesPerMeter;
}
}
for(int k = 0; k < 4; k++){
target_f[k] = target_f[k] + positionChange[k];
}
target[0] = (long) target_f[0];
target[1] = (long) target_f[1];
target[2] = (long) -target_f[2];
target[3] = (long) -target_f[3];
}
/*------------ SETUP ------------*/
void setup() {
Wire.begin(); // join i2c bus
Serial.begin(9600);
for(int k = 0; k < NMOTORS; k++){
pinMode(enca[k],INPUT);
pinMode(encb[k],INPUT);
pid[k].setParams(1,0.1,0,255);
}
attachInterrupt(digitalPinToInterrupt(enca[M0]),readEncoder<M0>,RISING);
attachInterrupt(digitalPinToInterrupt(enca[M1]),readEncoder<M1>,RISING);
}
/*------------ LOOP ------------*/
void loop() {
// time difference
long currT = micros();
float deltaT = ((float) (currT - prevT))/( 1.0e6 );
prevT = currT;
// set target position
setTarget(currT/1.0e6,deltaT);
// Send the requested position to the follower
Wire.beginTransmission(1);
sendLong(target[2]);
sendLong(target[3]);
Wire.endTransmission();
// Get the current position from the follower
long pos[4];
Wire.requestFrom(1, 8);
pos[2] = receiveLong();
pos[3] = receiveLong();
// Read the position in an atomic block to avoid a potential misread
ATOMIC_BLOCK(ATOMIC_RESTORESTATE) {
for(int k = 0; k < NMOTORS; k++){
pos[k] = posi[k];
}
}
// Loop through the motors
for(int k = 0; k < NMOTORS; k++){
int pwr, dir;
pid[k].evalu(pos[k],target[k],deltaT,pwr,dir); // compute the position
setMotor(dir,pwr,pwm[k],in1[k],in2[k]); // signal the motor
}
for(int i = 0; i<4; i++){
Serial.print(target[i]);
Serial.print(" ");
}
for(int i = 0; i<4; i++){
Serial.print(pos[i]);
Serial.print(" ");
}
Serial.println();
}
#include <util/atomic.h>
#include <Wire.h>
/*------------ CLASS ------------*/
class SimplePID{
private:
float kp, kd, ki, umax;
float eprev, eintegral;
public:
// Default initialization list
SimplePID() : kp(1), kd(0), ki(0), umax(255), eprev(0.0), eintegral(0.0) {}
// Set the parameters
void setParams(float kpIn, float kdIn, float kiIn, float umaxIn){
kp = kpIn; kd = kdIn; ki = kiIn; umax = umaxIn;
}
// Evaluate the signal
void evalu(int value, int target, float deltaT,int &pwr, int &dir){
// error
int e = target - value;
float dedt = (e-eprev)/(deltaT);
eintegral = eintegral + e*deltaT;
float u = kp*e + kd*dedt + ki*eintegral;
// motor power
pwr = (int) fabs(u);
if( pwr > umax ){
pwr = umax;
}
// motor direction
dir = 1;
if(u<0){
dir = -1;
}
// store previous error
eprev = e;
}
};
/*------------ GLOBALS AND DEFINITIONS ------------*/
// Define the motors
#define NMOTORS 2
#define M0 0
#define M1 1
const int enca[] = {0,1};
const int encb[]= {4,5};
const int pwm[] = {9,13};
const int in1[] = {8,11};
const int in2[] = {10,12};
// Global variables
long prevT = 0;
int posPrev[] = {0,0};
// positions
volatile int posi[] = {0,0};
volatile long pos[] = {0,0};
volatile long target[] = {0,0};
// PID classes
SimplePID pid[NMOTORS];
/*------------ FUNCTIONS ------------*/
void setMotor(int dir, int pwmVal, int pwm, int in1, int in2){
analogWrite(pwm,pwmVal);
if(dir == 1){
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
}
else if(dir == -1){
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
}
else{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
}
}
template <int j>
void readEncoder(){
int b = digitalRead(encb[j]);
if(b > 0){
posi[j]++;
}
else{
posi[j]--;
}
}
void sendLong(long value){
for(int k=0; k<4; k++){
byte out = (value >> 8*(3-k)) & 0xFF;
Wire.write(out);
}
}
long receiveLong(){
long outValue;
for(int k=0; k<4; k++){
byte nextByte = Wire.read();
outValue = (outValue << 8) | nextByte;
}
return outValue;
}
void requestEvent(){
sendLong(pos[0]);
sendLong(pos[1]);
}
void receiveEvent(int howMany){
target[0] = receiveLong();
target[1] = receiveLong();
}
void setup() {
Wire.begin(1); // join I2C
Wire.onRequest(requestEvent);
Wire.onReceive(receiveEvent);
for(int k = 0; k < NMOTORS; k++){
pinMode(enca[k],INPUT);
pinMode(encb[k],INPUT);
pid[k].setParams(1,0,0,255);
}
attachInterrupt(digitalPinToInterrupt(enca[M0]),readEncoder<M0>,RISING);
attachInterrupt(digitalPinToInterrupt(enca[M1]),readEncoder<M1>,RISING);
}
/*------------ LOOP ------------*/
void loop() {
// time difference
long currT = micros();
float deltaT = ((float) (currT - prevT))/( 1.0e6 );
prevT = currT; // Store the previous time value
// Read the position in an atomic block to avoid a potential misread
ATOMIC_BLOCK(ATOMIC_RESTORESTATE) {
for(int k = 0; k < NMOTORS; k++){
pos[k] = posi[k];
}
}
// Loop through the motors
for(int k = 0; k < NMOTORS; k++){
int pwr, dir;
pid[k].evalu(pos[k],target[k],deltaT,pwr,dir); // compute the position
setMotor(dir,pwr,pwm[k],in1[k],in2[k]); // signal the motor
}
}
Comments
Please log in or sign up to comment.