/*
* Project Capstone_Project
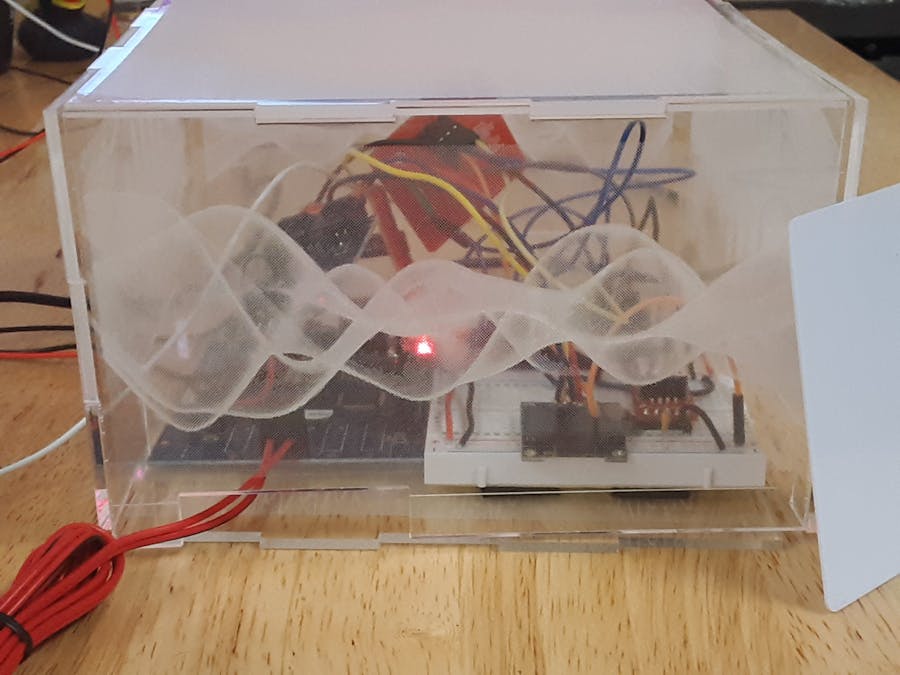
* Description: RFID Capstone Project
* Author: Daniel Mills
* Date:04-13-2022
*/
//SYSTEM_MODE(SEMI_AUTOMATIC);
///////////////////////////////
//-----Include and Objects Block
#include "credential.h" //creddential for ada fruit dashboard
#include "math.h"
#include <Adafruit_GFX.h> //library for graphics
#include <Adafruit_SSD1306.h> //library for OLED
#include <Adafruit_MQTT.h> //Library for publishing to Adafruit
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "clickButton.h"
#include <Encoder.h>
#include <Wire.h>
#include <SPI.h>
#include <Adafruit_PN532.h>
//Var for Encoder
Encoder myEnc(D2, D3);
int oldPosition;
int newPosition;
int encoderMap;
//Initialization
#define OLED_RESET D4
Adafruit_SSD1306 display(OLED_RESET);
String DateTime, TimeOnly;
//Rfid Vars
const int PN532_IRQ = A0;
const int PN532_RESET = A1;
Adafruit_PN532 nfc(PN532_IRQ, PN532_RESET);
uint8_t valid;
//Validation System for Rfid
uint8_t masterKey[4] = {0x13, 0x99, 0xC9, 0x1E};
uint8_t uidArray[4];
bool correctKey;
bool powerAccess;
//Button Vars
const int BUTTONPIN2 = D5;
int function = 0;
//Vars For Current and Vibration
//PECMAC125A I2C address is 0x2A(42) //Piezo is 0x50
#define Addr 0x2A
#define AddrP 0x50
//Piezo ((Pvalues)
long vibdat[4096][2];
int i;
int j;
byte dataP[2];
int raw_adc = 0;
float pSensor; //stores the piezo sensor readings for google sheet
//Current Vars
byte data[36];
int typeOfSensor = 0;
int maxCurrent = 0;
int noOfChannel = 0;
float current = 0.0;
//Vibration Bin Sorting Values
int x, y, c, d;
static int xx, yy, cc, dd;
//time vars
int startTime;
int last;
int lastTime2;
//Power Strip Var
const int POWERSTRIP = A5;
int Power; //MQTT Power Button Var
byte buf;
//Connecting to Adafruit Webservice
TCPClient TheClient;
// Setup the MQTT client class by passing in the WiFi client and MQTT server and login details.
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
/**** Feeds *********/
// Setup Feeds to publish or subscribe
Adafruit_MQTT_Publish mqttvib = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/vib");
Adafruit_MQTT_Publish mqttcurrent = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/current");
Adafruit_MQTT_Publish mqttuid = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/uid");
//Power
Adafruit_MQTT_Subscribe mqttPower = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME "/feeds/Power");
void setup() {
Serial.begin(115200);
attachInterrupt(D5, getMode, FALLING);
//Setup For Rfid
Serial.printf("Init Reader \n");
nfc.begin();
//////
//Rfid
rfidBegin();
//Setting Time for button clicks -- measured in millis
pinMode(BUTTONPIN2, INPUT_PULLUP);
pinMode(POWERSTRIP, OUTPUT);
//Getting Time Info -- This is for if info wanted to be recorded with the date
Time.zone(-7);
Particle.syncTime();
//Connect to Wifi
WiFi.connect();
while(WiFi.connecting()){
Serial.printf(".");
}
mqtt.subscribe(&mqttPower); //subscribe to power button from Adafruit
//Sets System Access False and turns the power off
powerAccess = false;
digitalWrite(POWERSTRIP, LOW);
//##Setup Information for the OLED
display.begin(SSD1306_SWITCHCAPVCC, 0x3c); // initialize with the I2C addr 0x3D (for the 128x64)
display.display(); // show splashscreen
display.setTextSize(1);
display.clearDisplay(); //clears the display
display.setCursor(0,0); // Start at top-left corner
display.setTextColor(WHITE);
display.printf("Please Scan Card"); //Outputs Switch Case
display.display();
//Setup for Reading Current and Piezo through I2C
//Initialise I2C communication as MASTER
Wire.begin();
// Initialise Serial Communication, set baud rate = 9600
Serial.begin(9600);
//Start I2C transmission
Wire.beginTransmission(Addr);
//Command header byte-1
Wire.write(0x92);
//Command header byte-2
Wire.write(0x6A);
//Command 2 is used to read no of sensor type, Max current, No. of channel
Wire.write(0x02);
//Reserved
Wire.write(0x00);
//Reserved
Wire.write(0x00);
//Reserved
Wire.write(0x00);
//Reserved
Wire.write(0x00);
//CheckSum
Wire.write(0xFE);
//Stop I2C transmission
Wire.endTransmission();
//Request 6 bytes of data
Wire.requestFrom(Addr, 6);
//Read 6 bytes of data
if (Wire.available() == 6)
{
data[0] = Wire.read();
data[1] = Wire.read();
data[2] = Wire.read();
data[3] = Wire.read();
data[4] = Wire.read();
data[5] = Wire.read();
}
typeOfSensor = data[0];
maxCurrent = data[1];
noOfChannel = data[2];
}
void loop() {
//*MQTT Start
MQTT_connect();
//Ping MQTT Broker every 2 minutes to keep connection alive
if ((millis()-last)>120000) { //function to ping the MQTT broker
Serial.printf("Pinging MQTT \n");
if(! mqtt.ping()) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
//*MQTT Subscription
Adafruit_MQTT_Subscribe *subscription; //looks for MQTT subscriptions for button input to turn on motor pump
while ((subscription = mqtt.readSubscription(100))) { //looks for receiving signal
if (subscription == &mqttPower) {
Power = atoi((char *)mqttPower.lastread); //takes last data and converts it char and converts it to a float
Serial.printf("Received %i from Adafruit.io feed Power Button \n", Power); //prints to screen
}
}
//Power Button
if (Power == 1){ //turns off the power if input was recieved from Adafruit
digitalWrite(POWERSTRIP, LOW);
Serial.printf("Power was turned off \n");
}
////Current Reader
for (int j = 1; j < noOfChannel + 1; j++){
//Commands for Reading Data
Wire.beginTransmission(Addr);
Wire.write(0x92); //Command for byte-1
Wire.write(0x6A); //Command for byt-2
Wire.write(0x01);
Wire.write(j);
Wire.write(j);
Wire.write(0x00);
Wire.write(0x00);
// CheckSum
Wire.write((0x92 + 0x6A + 0x01 + j + j + 0x00 + 0x00) & 0xFF);
// Stop I2C Transmission
Wire.endTransmission();
// Request 3 bytes of data
Wire.requestFrom(Addr, 3);
// Read 3 bytes of data
// msb1, msb, lsb
int msb1 = Wire.read();
int msb = Wire.read();
int lsb = Wire.read();
current = (msb1 * 65536) + (msb * 256) + lsb;
// Convert the data to ampere
current = current / 1000;
}
rfidCardRead();
///////////////////////////////
//Info will only show if Access is granted
if (powerAccess == TRUE){
//Encoder Info for Menu
int newPosition = myEnc.read();
if (newPosition != oldPosition) {
function = 0;
oldPosition = newPosition;
if (newPosition > 20){
myEnc.write(20);
}
if (newPosition < 0){
myEnc.write(0);
}
}
//maps the encoder to the Switch Case
encoderMap = map(newPosition, 0, 20, 0, 2);
// enter switch case
switch(encoderMap)
{
//Start
case 0:
if (function == 0){
display.clearDisplay(); //clears the display
display.setCursor(0,0); // Start at top-left corner
display.setTextColor(WHITE);
display.printf("MENU: \n->Current Read \nVib Read \nPublish Values \n"); //Outputs Switch Case
display.display();
}
else{
if(function == 1){
display.clearDisplay(); //clears the display
display.setCursor(0,0); // Start at top-left corner
display.setTextColor(WHITE);
display.printf("Channel: %i \n", j);
display.printf("Current Value: %0.2f \n", current);
display.display();
}
}
// Output data to dashboard
Serial.printf("Channel: %i \n", j);
Serial.printf("Current Value: %0.2f \n", current);
//Second Click ends logging and returns to menu
if(function == -1){
Serial.printf("SINGLE LONG click \n"); //for testing
function = 0;
break;
}
Serial.printf("Function %i", function);
break;
//Start
case 1:
Serial.printf("Function %i \n", function);
if (function == 0){
display.clearDisplay(); //clears the display
display.setTextColor(WHITE);
display.setCursor(0,0); // Start at top-left corner
display.printf("MENU: \nCurrent Read \n->Vib Read \nPublish Values \n"); //Outputs Switch Case
display.display();
}
else{
piezoRead(); // function collects values from the piezo sensor
if (function == 1){
//12-bit Resolution output every 1 second
if ((millis() - startTime > 1000)){
Serial.printf("\n%i,%i\n",millis(), raw_adc);
if(raw_adc >= 0 && raw_adc <= 25 ){
xx = 0;
xx = x++;
}
if(raw_adc >= 26 && raw_adc <= 50 ){
yy = 0;
yy = y++;
}
if(raw_adc >= 51 && raw_adc <= 75){
cc = 0;
cc = c++;
}
if(raw_adc >= 76){
dd = 0;
dd = d++;
}
display.clearDisplay(); //clears the display
display.setTextColor(WHITE);
display.setCursor(0,0); // Start at top-left corner
display.printf("Vib Values: %i\n", raw_adc); //Prints values to OLED
display.printf("0-25: %i\n", xx); //Prints values to OLED
display.printf("26-50: %i\n", yy); //Prints values to OLED
display.printf("51-75: %i\n", cc); //Prints values to OLED
display.printf("Vib > 76:%i\n", dd); //Prints values to OLED
display.display();
startTime = millis();
}
}
}
if(function == -1){
Serial.printf("SINGLE LONG click \n"); //for testing
function = 0;
break;
}
break;
case 2:
Serial.printf("Function %i \n", function);
if (function == 0){
display.clearDisplay(); //clears the display
display.setTextColor(WHITE);
display.setCursor(0,0); // Start at top-left corner
display.printf("MENU: \nCurrent Read \nVib Read \n->Publish Values \n "); //Outputs Switch Case
display.display();
}
else{
if (function == 1){
piezoRead(); // function collects values from the piezo sensor
pSensor = raw_adc;
Particle.publish("pSensor", String(pSensor)); //reads the vibration sensor values and puts them into a var to send to google sheets
//*Reads and Publishes Values to Adafruit
if((millis()-lastTime2 > 5000)) {
if(mqtt.Update()) { //starts MQTT updats
mqttcurrent.publish(current); //publishes the current values Adafruit
Serial.printf("Publishing Current %0.2f \n", current); //prints current values to serial monitor
mqttvib.publish(raw_adc); //pub the piezo values
Serial.printf("Publishing Vib %i \n", raw_adc); //prints piezo to serial monitor
//Prints Values to the OLED
display.clearDisplay(); //clears the display
display.setTextColor(WHITE);
display.setCursor(0,0); // Start at top-left corner
display.printf("Publishing Current: \n");
display.printf("%0.2f \n", current);
display.printf("Publishing Vibration:");
display.printf("%i \n", raw_adc);
//display.printf("Publishing Vib to \n");
display.display();
}
lastTime2 = millis();
}
}
}
if(function == -1){
Serial.printf("SINGLE LONG click \n"); //for testing
function = 0;
break;
}
break;
default:
function = 0;
break;
oldPosition = encoderMap;
}
}
}
///////////////////////////
//////////////////////////
//Void Functions
//Function Starts Rfid
void rfidBegin(){
uint32_t versiondata = nfc.getFirmwareVersion();
if (! versiondata){
Serial.printf("Didn't find PN53x board");
while (1);
}
Serial.printf("\nFound chip PN5"); Serial.print((versiondata>>24) & 0xFF, HEX);
Serial.printf("\nFirmware ver. "); Serial.print((versiondata>>16) & 0xFF, DEC);
Serial.printf("."); Serial.print((versiondata >>8) & 0xFF, DEC);
nfc.SAMConfig();
nfc.setPassiveActivationRetries(0xFF);
Serial.printf("\nWaiting for Card \n");
}
//Function for Looping Rfid
void rfidCardRead(){
uint8_t success;
uint8_t uid[] = {0, 0, 0, 0, 0, 0, 0}; //Buffer to store the returned UID
uint8_t uidLength; //Length of the UID (4 or 7 bytes)
success = nfc.readPassiveTargetID(PN532_MIFARE_ISO14443A, uid, &uidLength);
if (success) {
Serial.printf("\nSuccess getting target ID \n");
// Display some basic information about the card
Serial.printf("Card Type ISO14443A card \n");
Serial.printf("UID Value: ");
nfc.PrintHex(uid, uidLength);
Serial.printf("............. \n");
if (uidLength == 4){
Serial.printf("Mifare Classic Card \n");
Serial.printf("Authenticating Card \n");
uint8_t keya[6] = { 0XFF, 0XFF, 0XFF, 0XFF, 0XFF, 0XFF };
success = nfc.mifareclassic_AuthenticateBlock(uid, uidLength, 4, 0, keya);
if (success){
//Serial.printf("Sector 1 has been authenticated \n");
uint8_t data[16];
success = nfc.mifareclassic_ReadDataBlock(4, data);
if(success){
Serial.printf("Reading... \n");
nfc.PrintHexChar(data, 16);
correctKey = isMatched(uid, masterKey);
if (correctKey == 1) {
Serial.printf("Valid Access Card \n");
}
else{
Serial.printf("Invalid Access Card \n");
}
}
else{
Serial.printf("Card Reading Error \n");
}
}
}
}
Serial.printf("#####BREAK######");
}
//Function for Validating master card
bool isMatched (uint8_t uid[4], uint8_t masterKey[4]) {
int i;
for(i=0; i < 4; i++){
Serial.printf("%i", uid[i]);
if(uid[i] != masterKey[i] ){
Serial.printf("*Invalid Key \n");
Serial.printf(" \n");
Serial.printf("Your UID Value: %i \n", uid);
display.clearDisplay();
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Invalid Key - Access Denied"); //Outputs Switch Case Access
display.display();
//delay(1000);
powerAccess = FALSE;
digitalWrite(POWERSTRIP, LOW);
Serial.printf("Power strip is OFF");
Serial.printf("PowerAccess %i \n", powerAccess);
return false;
}
}
Serial.printf("*Valid Key \n");
display.clearDisplay();
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Valid Key - Access Granted"); //Output for Switch Case access
display.display();
powerAccess = TRUE;
digitalWrite(POWERSTRIP, HIGH);
Serial.printf("Power strip is ON");
Serial.printf("PowerAccess %i \n", powerAccess);
return true;
}
//Function for changing button state
void getMode(){
function++;
if(function == 2){
function = -1;
Serial.printf("Inside -1(2c) %i \n", function);
}
if(function != 2){
Serial.printf("Outide Function 0(0c) %i \n", function);
}
}
// Function to connect and reconnect as necessary to the MQTT server.
void MQTT_connect() { //this function is important to include for connecting to MQTT
int8_t ret;
// Stop if already connected.
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.printf("%s\n",(char *)mqtt.connectErrorString(ret));
Serial.printf("Retrying MQTT connection in 5 seconds..\n");
mqtt.disconnect();
delay(5000); // wait 5 seconds
}
Serial.printf("MQTT Connected!\n"); //output for if connection was successful
}
////////////////////////////
//Function For Getting Piezo Values
void piezoRead(){
for(i=0;i<4096;i++) {
// Start I2C transmission
Wire.beginTransmission(AddrP);
// Calling conversion result register, 0x00(0)
Wire.write(0x00);
// Stop I2C transmission
Wire.endTransmission();
// Request 2 bytes
Wire.requestFrom(AddrP, 2);
// Read 2 bytes of data, raw_adc msb, raw_adc lsb
if(Wire.available() == 2){
dataP[0] = Wire.read();
dataP[1] = Wire.read();
}
// Convert the data to 12 bits
raw_adc = ((dataP[0] * 256) + dataP[1]) & 0x0FFF;
vibdat[i][0] = micros();
vibdat[i][1] = raw_adc;
}
}


_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
{kind=link}
Comments