//*********************************************************************************
//*************** Designed for: *******************
//*************** GROVE FRANKLYN LIGHTNING SENSOR AS3935 *******************
//*************** front of lightning fall detection sensor *******************
//*************** *******************
//*************** first release: 1.0.0 - 01/02/2023 *******************
//*************** Author: Davide Cogliati *******************
//*********************************************************************************
// *********
// TITLE OF PROJECT: *********
// AUTOMATE PROTECTION ACTIONS AGAINST INJURIES FOR LIGHTNING STRIKING *********
// *********
//*********************************************************************************
//Abstract on the work:
//------------------------------------------------------------------------------------------------------
//This GROVE Sensor board integrates the AS3935 a programmable fully integrated Lightning
//Sensor IC that detects the approach of lightning activity in the vicinity and provides an
//estimation of distance to the head of the storm. In the AS3935 there is an embedded lightning
//algorithm that checks the incoming signal form during time and rejects the potential man-made
//disturbers as false alarms.
//The AS3935 can also provide information on the noise level and inform the external microcontroller
//in case of high noise conditions, with the noise floor generator and noise floor evaluation blocks.
//These latter functions are programmable via the internal registers to optimize the working on
//field of the sensor itself (INDOOR, OUTDOOR).
//The AS3935 can be programmed via IC or a 4-wire standard SPI. Also along with IC it is possible to
//choose among three different addresses (0X01, 0X02, 0X03).
//The board results very sensitive to electromagnetic fields so accidental peaks or false lightnings can be
//revealed, of course the setup of the internal registers can optimize the false triggering events.
//If a microprocessor is connected to the board via the IC bus and the IRQ pin provided on the board the
//lightning alarms can be managed in the best way achieving also a filtering on the events writing an
//appropriate algorithm.
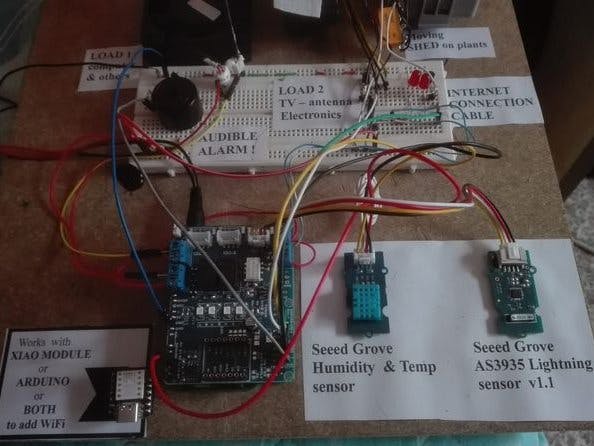
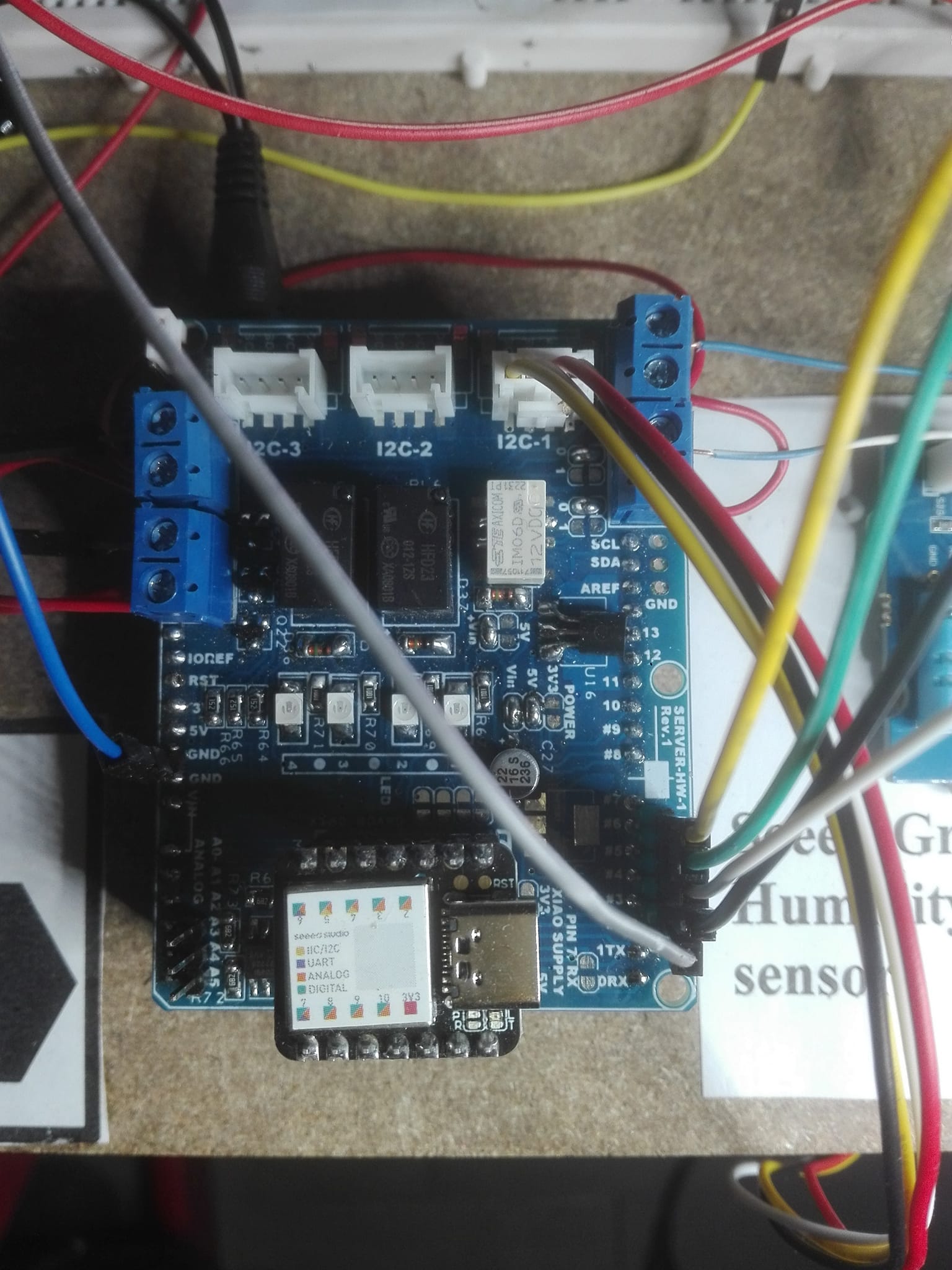
//The board is connected to the Designed shield board ServerHW that integrates all is need to interface
//to an Arduino Uno in piggyback mode or carry the XIAO Seeed Studio alone. Both can be present making
//this duo versatile and powerful in tasking, or using the XIAO WiFi module to send remote messages
//to a node.
//The ServerHW designed board can control external power systems or electric motors, alarms or other
//functions just using the onboard relais. This board can interface up to 3 module running in I2C
//mode so can connect to Wio Terminal from Seeed Studio plus other sensors.
//This sketch was prepared after many test to find weak points in working and all was done
//in this direction, of course a lot of functions can be added or made better looking, but
//this will need major efforts and imagination. Just started !
//
//
//********************************************************************************
//********************************************************************************
//********************************************************************************
#include <GROVEAS3935.h> //Library include statement (go to Library Manager Arduino)
GROVEAS3935 Sensor; //scope declaration of the functions and variables Public
//in the library declared "Sensor"
#define Device_adress 3 //IMPORTANT, sensor comunicating trough I2C need to set a
//HW address. the Grove-AS3935Lightning-sensor use this
//comunication mode (can also work with SPI).
//HW programmed I2C Device address, by default is = 3.
//--------------------------------------------------------------------------------
//IMPORTANT NOTE:
//--------------------------------------------------------------------------------
//DEFINE where the sensor is positioned, INDOOR or OUTDOOR ?
//refere to the Arduino library examples to change this mode
//--------------------------------------------------------------------------------
#define INDOOR 1
#define OUTDOOR 0
//--------------------------------------------------------------------------------
//Arduino pin assignment, the ServerHW board is piggyback on it.
//--------------------------------------------------------------------------------
#define Led_blu 7
#define Led_red 11
#define Led_yellow 13
#define Led_yellow0 12
#define Led_green 7
#define Buzzer 2
#define RL5 8
#define RL6 9
#define Double 10
#define Motor_on 5
#define Invert 4
#define FREEZE_LEVEL 3 //settling time to wait before reading sensor
//after a Power down and successive Power up sequence.
//-----------------------------------------------------------------------------
//VERY IMPORTANT TO SEE RESULTS OUTPUT WITH ARDUINO SERIAL -----------
//-----------------------------------------------------------------------------
//SET THE DISPLAY MODE WITH ARDUINO:
//select directly in ARDUINO GUI for "SERIAL MONITOR" or "SERIAL PLOTTING"
//----------------------------------------------------------------------------
//+) serial monitor = data flow in legible format and variables readout
//+) serial plotting = show plotting of lightning events and other variables
//--------------------------------------------------------------------------------------------------------
char LITERAL_mode =0; //0= no print data in SERIAL MONITOR, 1= yes print data on SERIAL MONITOR
char GRAPH_mode =1; //0= no graphical data in SERIAL PLOTTER, 1= yes graphical data SERIAL PLOTTER
//--------------------------------------------------------------------------------------------------------
int device;
void setup()
{
//---------------------------------------------------------------
//Initialize HW I2C address of board with address found valid !
//default = 3
//---------------------------------------------------------------
device = Device_adress;
Sensor.initializeDevice(device);
//---------------------------------------------------------------
Serial.begin(9600);
Wire.begin(); // start I2C communication
Wire.setClock(100000); // set I2C speed
if (LITERAL_mode ==1)
{
Serial.println("-----------------------------------------------");
Serial.println("Automate Lightning detection");
Serial.println("Grove-AS3935LIGHTNING SENSOR automation example");
Serial.println("Starting....");
Serial.println("-----------------------------------------------");
delay(1000);
}
if (OUTDOOR ==1)
{
Sensor.setOutdoor(); //set for indoor position of sensor
delay(1000);
}
if (INDOOR ==1)
{
Sensor.setIndoor(); //set for outdoor position of sensor
delay(1000);
}
//------------------------------------------
//SET pinmode for ARDUINO - ServerHW board
//------------------------------------------
pinMode(RL5,OUTPUT);
pinMode(RL6,OUTPUT);
pinMode(Double,OUTPUT);
pinMode(Led_green,OUTPUT);
pinMode(Led_yellow,OUTPUT);
pinMode(Led_yellow0,OUTPUT);
pinMode(Led_red,OUTPUT);
pinMode(Led_blu,OUTPUT);
pinMode(Buzzer,OUTPUT);
pinMode(Motor_on,OUTPUT);
pinMode(Invert,OUTPUT);
digitalWrite(Led_blu,LOW);
digitalWrite(Led_green,LOW);
digitalWrite(Led_yellow,LOW);
digitalWrite(Led_yellow0,LOW);
digitalWrite(Led_red,LOW);
digitalWrite(RL5,LOW);
digitalWrite(RL6,LOW);
digitalWrite(Double,LOW);
digitalWrite(Buzzer,LOW);
digitalWrite(Motor_on,LOW);
digitalWrite(Invert,LOW);
//------------------------------------------
//LED TEST OUTPUT
//------------------------------------------
digitalWrite(Led_blu,HIGH);
delay(100);
digitalWrite(Led_blu,LOW);
//
digitalWrite(Led_green,HIGH);
delay(100);
digitalWrite(Led_green,LOW);
//
digitalWrite(Led_yellow,HIGH);
delay(100);
digitalWrite(Led_yellow,LOW);
//
digitalWrite(Led_yellow0,HIGH);
delay(100);
digitalWrite(Led_yellow0,LOW);
//
digitalWrite(Led_red,HIGH);
delay(100);
digitalWrite(Led_red,LOW);
//
digitalWrite(Buzzer,HIGH);
delay(100);
digitalWrite(Buzzer,LOW);
//---------------------------------
digitalWrite(Buzzer,HIGH);
delay(100);
digitalWrite(Buzzer,LOW);
digitalWrite(Led_red,HIGH);
delay(100);
digitalWrite(Led_red,LOW);
digitalWrite(Led_yellow0,HIGH);
delay(100);
digitalWrite(Led_yellow0,LOW);
digitalWrite(Led_yellow,HIGH);
delay(100);
digitalWrite(Led_yellow,LOW);
digitalWrite(Led_green,HIGH);
delay(100);
digitalWrite(Led_green,LOW);
//
digitalWrite(Buzzer,LOW);
}
//------------------------------------------------------------------------------------
// MAIN LOOP RUNNING
//------------------------------------------------------------------------------------
void loop()
{
int c;
int i;
int indevice; //device number I2C address, in final application you can assign
//directly the address (for example: indevice = 3;)
int dataRead =0;
//---------------------------------------------------
// read/write functions for I2C mode:
//---------------------------------------------------
//**************************************************************************
//**************************************************************************
int done =1; //flag to start self test on I2C sensor address
indevice = 0; //reset address value
//--------------------------------------------------------------------------
//WAITING CYCLE - ENDLESS - LOOKING FOR LIGHTNINGS
//variables from AS3935 during operative cycle
//--------------------------------------------------------------------------
int INT_struck ; //event interrupt register
int N_lightning; //number of lightnings detected
int Av_distance; //average distance extimation
int NOISE; //interrupt for high noise level
int Disturber; //interrupt for disturber detected
int L_struck; //interrupt for lightning detected
int Distance; //estimated hit distance
int Energy_LSB; //energy single event LOW BYTE
int Energy_MSB; //energy single event HIGH BYTE
int Energy_MMSB; //energy single event AV.Energy content
int Calculate_Intensity; //weighted LSB-MSB-MMSB
//-------------------------------------------------
//-------------------------------------------------
//GRAPH SCALING MIN-MAX: MODIFY AS YOU LIKE!!!
//-------------------------------------------------
int MAX_scale =30; //setting max Y of plotting
int min_scale =0; //setting min Y of plotting
//-------------------------------------------------
//PRINT OUT METHOD:
//---------------------------------------------------------------------------
// LITERAL_mode =0; //0= no printing data on SERIAL MONITOR
// GRAPH_mode =1; //1= yes print graphical data in SERIAL PLOTTER
//---------------------------------------------------------------------------
if (GRAPH_mode ==1)
{
//*****************************************
//SET UP THE PLOTTER X-Y READINGS (X= time)
//*****************************************
Serial.print("MAX"); //max line marker
Serial.print(" ");
Serial.print("min");//min line marker
Serial.print(" ");
//*****************************************
//SETUP LABELS NAME
//*****************************************
Serial.print("NOISE");
Serial.print(" ");
Serial.print("Disturber");
Serial.print(" ");
Serial.print("Distance");
Serial.print(" ");
Serial.print("Energy_MSB/20"); //SCALED FACTOR /20
Serial.print(" ");
Serial.print("Energy_MMSB");
Serial.print(" ");
Serial.print("Tot.Energy");
Serial.print(" ");
Serial.print("p-event: ");
Serial.print(" ");
Serial.println("elap.time: ");
}
//**************************************************
//**************************************************
// STARTING ENDLESS OBSERVATION CYCLE FOR EVENTS
//**************************************************
//**************************************************
int P_event = 0; //positive event, Lightning in a observation window
int Elapsed_time =0; //every count is 1 sampling on the sensor output
int Noise_events=0; //noise events captured in an observation window (Elapsed_time)
int Dist_events=0; //distrubance events happened in an observation window
int freeze=0; //this counter is for reducing load turn up interference
//with the sensor if near a load.
//-------------------------------------
//ACTIVATE SERVICES - open SHED -------
//-------------------------------------
//------------------------------------------------------------
//sequencing of systems ON, avoid inrush currents, oveloads
//------------------------------------------------------------
digitalWrite(Buzzer,HIGH);
digitalWrite(RL5,HIGH);
delay(2000);
digitalWrite(Buzzer,LOW);
digitalWrite(RL6,HIGH);
delay(2000);
digitalWrite(Buzzer,HIGH);
digitalWrite(Double,HIGH);
delay(2000);
digitalWrite(Buzzer,LOW);
//SHED OPEN 4 SEC.
digitalWrite(Motor_on,HIGH);
digitalWrite(Invert,LOW);
delay(4000);
//----------------------------------------------------------------------
//TURN SHED MOTOR OFF, home for shed is reached (time limited movement)
//----------------------------------------------------------------------
digitalWrite(Motor_on,LOW);
digitalWrite(Invert,LOW);
//----------------------------------------------------------------------
int Scan_rate = 10; // <-- SCANNING INTERVAL .... MODIFY AS NEEDED !!!
//----------------------------------------------------------------------
while (1) //END LESS LOOP you can add ESCAPE condition
//if necessary to "break" out
{
digitalWrite(Led_blu,HIGH); //LIVE FLASH..flashes each seconds show
//activity is on: modify "Scan_rate" to change
if (LITERAL_mode ==1)
{
Serial.println();
Serial.print(" *** WAITING FOR LIGHTNING - WATCHING "); // Print the character
Serial.println();
}
//------------------------------------------------------------------
//CHECK FOR INCOMING INT MESSAGE ON REG 0X03 bit= INT_L ---> "1000"
//------------------------------------------------------------------
c=0;
i= 0x03; //interrupt INT register address
dataRead= Sensor.readFromAS3935 (device, i); //read data from internal registers trough adr_I2C
//------------------------
//CLEAN the variables
//------------------------
NOISE =0 ;
Disturber =0;
L_struck =0 ;
Distance =0 ;
Energy_LSB =0 ;
Energy_MSB =0 ;
Energy_MMSB =0 ;
Calculate_Intensity=0;
//marker=3; //kept raised to be visible
//------------------------
c = dataRead ; // Receive a byte as character
INT_struck = c;
NOISE =INT_struck & (0b00000001);
Disturber =INT_struck & (0b00000100);
L_struck =(INT_struck & (0b00001000))/8; //this is a flag bit so can be 0 or 1.
if (NOISE >0)
{
Noise_events= Noise_events +1;
}
if (Disturber >0)
{
Dist_events= Dist_events + 1;
}
//------------------------------------------------------------------------------------------------
//DEBUG ALL !!!
//------------------------------------------------------------------------------------------------
// L_struck =1; ---> this show all messages, testing purpose-DEBUG of AS3935 system remove "//"
//-------------------------------------------------------------------------------------------------
//
if ((GRAPH_mode == 1) & (L_struck ==0))
{
//------------------------------------------------
//GRAPH- PLOTTER no Lightnings to show
//------------------------------------------------
Serial.print(MAX_scale,DEC);
Serial.print(" ");
Serial.print(min_scale,DEC);
Serial.print(" ");
//------------------------------------------------
Serial.print(0);
Serial.print(" ");
Serial.print(Disturber*3,DEC); //just to make this trace enhanced on graph
Serial.print(" ");
Serial.print(0);
Serial.print(" ");
Serial.print(0);
Serial.print(" ");
Serial.print(0);
Serial.print(" ");
Serial.print(0);
Serial.print(" ");
Serial.print(0);
Serial.print(" ");
Serial.println(0);
}
//------------------------------------------------------------------------------
//hit EVENT captured: show the result !
//------------------------------------------------------------------------------
if (L_struck > 0)
{
freeze = freeze -1;
if(freeze <0)
freeze=0;
//----------------------------------------------------------------
//distance estimation - other lightning data - energy calculation
//----------------------------------------------------------------
//estimated DISTANCE:
//--------------------
c=0;
i= 0x07;
dataRead= Sensor.readFromAS3935 (device, i); //read data from internal registers trough adr_I2C
c = dataRead ;//Wire.read(); // Receive a byte as character
Distance = c;
Distance = Distance & (0b00111111);
//--------------------------------------------
//ENERGY content registers LSB - MSB - MAIN
//--------------------------------------------
i= 0x04;
dataRead= Sensor.readFromAS3935 (device, i); //read data from internal registers trough adr_I2C
c=0;
c = dataRead ;//Wire.read(); // Receive a byte as character
Energy_LSB = c;
//-------------------------
//ENERGY MSB
//-------------------------
i= 0x05;
dataRead= Sensor.readFromAS3935 (device, i); //read data from internal registers trough adr_I2C
c=0;
c = dataRead ;//Wire.read(); // Receive a byte as character
Energy_MSB = c;
//-------------------------
//ENERGY MMSB
//-------------------------
i= 0x06;
dataRead= Sensor.readFromAS3935 (device, i); //read data from internal registers trough adr_I2C
c=0;
c = dataRead ;//Wire.read(); // Receive a byte as character
Energy_MMSB = c;
Energy_MMSB = Energy_MMSB & (0b00011111);
Calculate_Intensity= Sensor.calculateIntensity ();//just a figure of merit on relative
//intensity of events for comparison.
if ((NOISE==0) & (Disturber ==0) & (freeze== 0))
{
//-----------------------------------------------------------
//COUNT positive (Lightning event) in the observation window
//-----------------------------------------------------------
P_event = P_event + 1; //increment positive event in an observation window
}
//---------------------------------------------------------
//select type of readout FULL NUMERICAL DATA or GRAPH DATA
//---------------------------------------------------------
if (GRAPH_mode == 1)
{
//------------------------------------------------
//LEGIBILE FORM OF EVENT READINGS
//------------------------------------------------
//SETTING UP MAX-min scale for plot
//-----------------------------------
Serial.print(MAX_scale);
Serial.print(" ");
Serial.print(min_scale);
Serial.print(" ");
//------------------------------------------------
Serial.print((NOISE*3),DEC); // x 10 enhances the sight on the graph
Serial.print(" ");
Serial.print(Disturber*3,DEC); // x 10 enhances the sight on the graph
Serial.print(" ");
Serial.print(Distance,DEC);
Serial.print(" ");
Energy_MSB = Energy_MSB/20; //JUST A SCALING FACTOR TO PLOT !
Serial.print(Energy_MSB,DEC);
Serial.print(" ");
Serial.print(Energy_MMSB,DEC);
Serial.print(" ");
Calculate_Intensity = Calculate_Intensity/500; //SCALING FACTOR for graph
Serial.print((Calculate_Intensity),DEC);
Serial.print(" ");
Serial.print((P_event),DEC);
Serial.print(" ");
Serial.println((Elapsed_time),DEC);
}
if (LITERAL_mode == 1)
{
//------------------------------------------------
//LEGIBILE FORM OF EVENT READINGS
//------------------------------------------------
Serial.println();
Serial.println("*****************************************************");
Serial.println();
Serial.print("Noise LEVEL detected: ");
Serial.println(NOISE,DEC);
Serial.print("Disturber detected: ");
Serial.println(Disturber,DEC);
Serial.print("Lightining detected: ");
Serial.println( L_struck,DEC);
Serial.println();
Serial.print("Estimated hit distance: ");
Serial.println(Distance,DEC);
Serial.print("LSB single event energy: ");
Serial.println(Energy_LSB,DEC);
Serial.print("MSB single event energy: ");
Serial.println(Energy_MSB,DEC);
Serial.print("MMSB single event energy: ");
Serial.println(Energy_MMSB,DEC);
Serial.print("Weighted total energy: ");
Serial.println(Calculate_Intensity,DEC);
Serial.print("Window total Lightning event: ");
Serial.println((P_event),DEC);
Serial.print("Window NOISE-events: ");
Serial.println((Noise_events),DEC);
Serial.print("Window DISTURB-events: ");
Serial.println((Dist_events),DEC);
Serial.print("Window elap.time: ");
Serial.println((Elapsed_time),DEC);
Serial.print("Freeze alarm level: ");
Serial.println((freeze),DEC);
}
//---------------------------------------------------------------------------------
//----------------------------------
//----------------------------------
//----------------------------------
//ALARMING OUTPUT - DEFINE severity
//----------------------------------
//
//FILTERING OF SENSOR DATA: 2 ways to do
//1) refine the setup of the Sensor trough internal registers;
//2) operate on SW algorythm to verify the alarma;
//
// The scope in point (1) & (2) is to adapt to the existing environment and:
//
//+) AVOID NOISE
//+) AVOID DISTURBANCIES
//+) AVOID SIMILAR LIGHTNING ACTIVITY DUE TO HUMAN ACTIVITY
// (motors, ON-OFF lights, sensor touch by hands, WiFi approaching...)
//----------------------------------------------------------------------------------
//*****************************************************************************
//3 CONDITIONS TO MAKE A DECISION TO TURN SYSTEM OFF
//*****************************************************************************
//1) NOISE=0 noise should be absent in the measure
//2) Disturber=0 no disturb was sensed
//3) freeze=0 freezing counting is zero, out of power turn ON transients
//------------------------------------------------------------------------------
if ((NOISE==0) & (Disturber ==0) & (freeze== 0))
{ //----------------------------------
//--------------------------------------------------
//STATISTICAL FILTERING OF EVENTS / HUMAN ACTIVITY
//--------------------------------------------------
if(Elapsed_time > 1) //point of starting analyzing in the window
{
if(P_event >= 1) //threshold of lightnings (positvie events) in a fixed window
{ //can also be managed trough setup of the sensor AS3935
//read datasheet AS3935_Datasheet_EN_V2.Pdf the difference
//is here we decide the time dimension of the time window
if (Distance < 3)
{
digitalWrite(Led_red,HIGH);
}
if (Distance >=3 & Distance < 10)
{
digitalWrite(Led_yellow,HIGH);
}
if (Distance >=10 & Distance < 20)
{
digitalWrite(Led_yellow0,HIGH);
}
if (Distance >=20 & Distance < 30)
{
digitalWrite(Led_yellow,HIGH);
digitalWrite(Led_green,HIGH);
}
if (Distance > 30)
{
digitalWrite(Led_green,HIGH);
}
//-----------------------------------
//turn OFF services sequencing
//moving shed to CLOSE
//-----------------------------------
digitalWrite(Buzzer,HIGH);
digitalWrite(RL5,LOW);
delay(3000);
digitalWrite(RL6,LOW);
delay(3000);
digitalWrite(Double,LOW);
digitalWrite(Invert,HIGH);
delay(1000);
digitalWrite(Motor_on,HIGH);
delay(4000);
digitalWrite(Buzzer,LOW);
//-------------------
//STOP SHED movement
//-------------------
digitalWrite(Motor_on,LOW);
delay(3000);
//-------------------
//-------------------------------------
//WAITING TIME or CONDITION TO RESTART
//-------------------------------------
delay(5000); //just 5 seconds to make it simple!
//-------------------------------------
digitalWrite(Led_yellow0,LOW);
digitalWrite(Led_red,LOW);
digitalWrite(Led_yellow,LOW);
digitalWrite(Led_green,LOW);
//-----------------------------------
//restart all with sequencing
//-----------------------------------
//------------------------------------
//ALL SERVICES ARE WORKING
//------------------------------------
digitalWrite(RL5,HIGH);
delay(2000);
digitalWrite(RL6,HIGH);
delay(2000);
digitalWrite(Double,HIGH);
digitalWrite(Buzzer,LOW);
digitalWrite(Motor_on,HIGH);
//---------------
//open shed
//---------------
digitalWrite(Invert,LOW);
delay(3000); //-------------> settling time to prevent system ON inrush currents!
//-------------------
//STOP SHED
//-------------------
digitalWrite(Motor_on,LOW);
delay(3000); //-------------> settling time to prevent system ON inrush currents!
//-----------------------------------
freeze = FREEZE_LEVEL; //this makes n.cycles readout of sensor so to flush out data altered by motor moving
}
}
}
//-----------------------------------------------------
} //end of (if) manager for L_struck > 0
//-----------------------------------------------------
//
//------------------------------------
//ALL SERVICES ARE WORKING ON STATE !!
//------------------------------------
digitalWrite(RL5,HIGH);
digitalWrite(RL6,HIGH);
digitalWrite(Double,HIGH);
digitalWrite(Buzzer,LOW);
//------------------------------------
//------------------------------------
digitalWrite(Led_blu,LOW); // <--------------FLASH OFF LIVE LED
delay(Scan_rate); // <------------- SCANNING INTERVAL .... MODIFY AS NEEDED !!!
//------------------------------------
//
//**************************************************************************
//**************************************************************************
//****** CHECKING FOR PRESENCE OF LARGE NUMBER OF DISTURBS IN A *
//****** FIXED TIME ("Elapsed_time") IN ORDER TO STOP SYSTEM *
//****** CONTROL IN CASE OF OUT OF TOLERANCE (avoid stop down not required)*
//**************************************************************************
//**************************************************************************
Elapsed_time = Elapsed_time + 1; //every count= 1 sample on the sensor output
if (Elapsed_time > 15) //time sample window under test.
{
Elapsed_time =0; //restart the observation window
P_event = 0; //reset count for positive event (observation window)
Dist_events =0; //reset counting for disturb (observation window)
Noise_events= 0; //reset counting for noise (observation window)
//
if(Dist_events>10) //tolerated disturb threshold !
{ //modify as necessary..........
//-----------------------------------
//turn OFF services with sequencing
//HIGHLY DISTURBED ENVIRONMENT
//-----------------------------------
//buzzer
digitalWrite(RL5,LOW);
delay(2000);
digitalWrite(RL6,LOW);
delay(2000);
digitalWrite(Double,LOW);
delay(2000);
digitalWrite(Buzzer,LOW);
digitalWrite(Motor_on,LOW);
digitalWrite(Invert,LOW);
//---------------------------------------------------
//Trapping endless loop - disturbs are too high
//to have a good reading with sensor
//check installation, try to rotate sensor !
//Sensor is sensitive to polarization & inclination
//---------------------------------------------------
while(1)
{
digitalWrite(Buzzer,LOW);
digitalWrite(Led_yellow0,LOW);
digitalWrite(Led_red,LOW);
digitalWrite(Led_yellow,LOW);
digitalWrite(Led_green,LOW);
delay(1000);
digitalWrite(Buzzer,HIGH);
digitalWrite(Led_yellow0,HIGH);
digitalWrite(Led_red,HIGH);
digitalWrite(Led_yellow,HIGH);
digitalWrite(Led_green,HIGH);
delay(1000);
}
}
//---------------------------------------------------
//--- end trapping loop ----------------------------
//---------------------------------------------------
}
}
}
//-----------------------------------------------------------------------------
//------------------ END OF SKETCH -------------------------------------------
//-----------------------------------------------------------------------------



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments
Please log in or sign up to comment.