


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
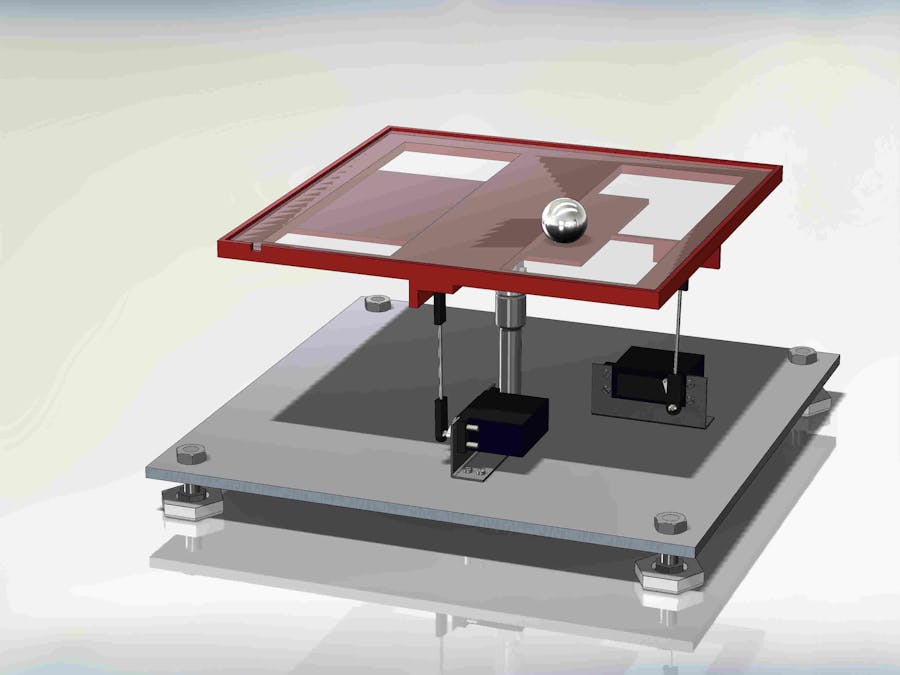
This is my homemade Ball & Plate system.
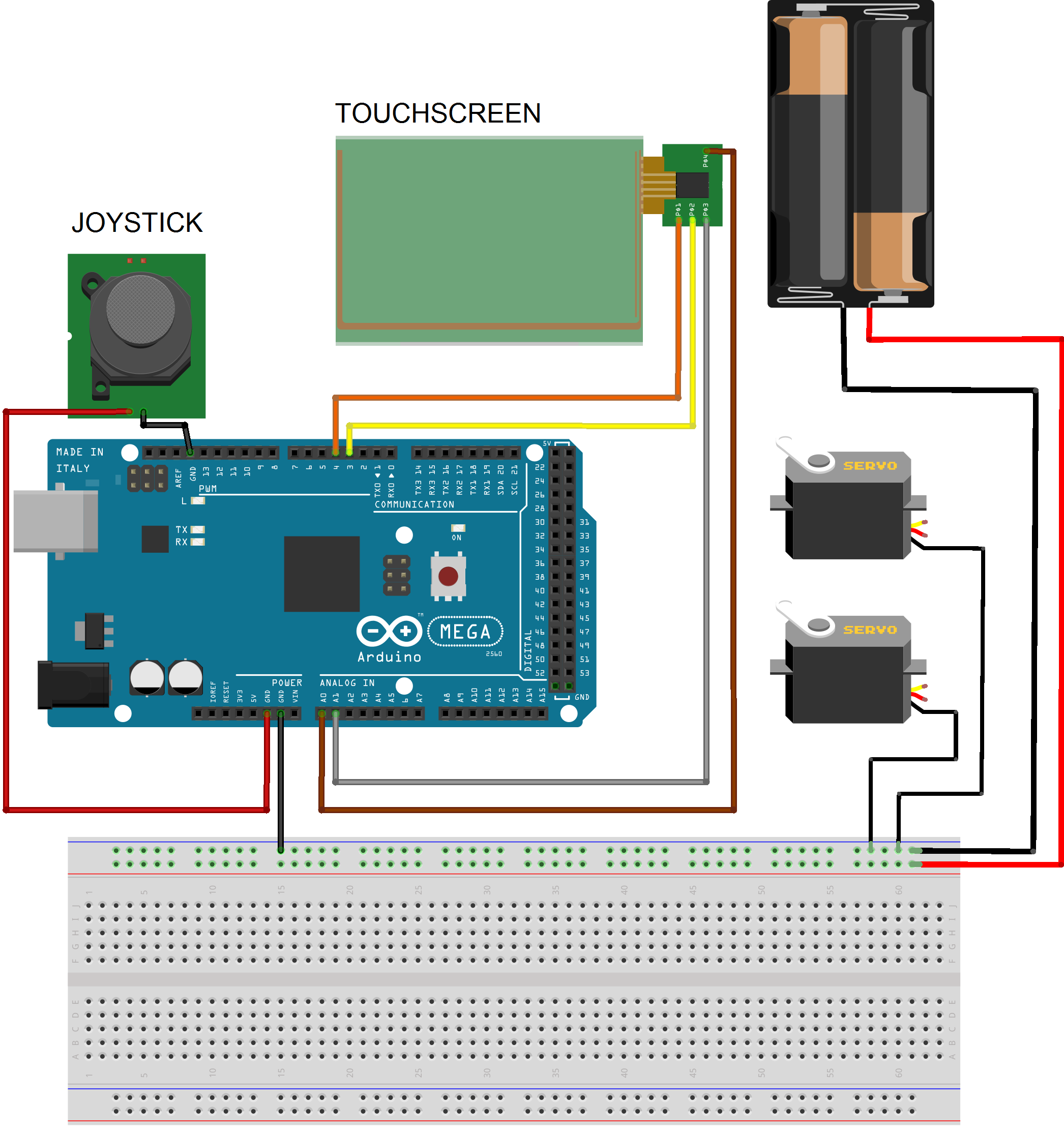
System consist of 2 digital servo motors (Hitec HS-7955TG Ultra Torque), microcontroller Arduino MEGA 2560, and 4 wire resistive touchscreen (7"). There is Linear-Quadratic (LQ) regulator with Kalman filter working as Linear-quadratic estimator (LQE). This system can move any ( heavier ) round element to any point of the surface to an accuracy of ± 1 mm .
There are some photos taken before the experiment
1 / 4
/////////Ball and Plate///////////////////////////////
/*
BALL AND PLATE PID CONTROL
*/
//////////////////////////////////////////////////////
///Libraries///
#include <PID_v1.h>
#include <stdint.h>
#include "TouchScreen.h"
#include <SPI.h>
#include <Wire.h>
#include <wiinunchuk.h>
#include<Servo.h>
// Definitions TOUCH PINS
#define YP A0 //0
#define XM A1 //1
#define YM 3 //3
#define XP 4 //4
TouchScreen ts = TouchScreen(XP, YP, XM, YM, 300);
int buttonPushCounter = 1; // counter for the number of button presses
int lastButtonState = 0; // previous state of the button
int flag , flagZ ;
float xVal , yVal ;
int cCount=0;
int flagC=0;
int flagK=0;
float kk=0;
int fl=0;
double l =0.00;
unsigned int noTouchCount = 0; //viariable for noTouch
double k=0;
// PID values
double Setpoint, Input, Output; //for X
double Setpoint1, Input1, Output1; //for Y
//
int Modulo;
long lastcas=0;
// servos variables
Servo servo1; //X axis
Servo servo2; //Y axis
uint16_t homeX = 550; // raw data value for center of touchscreen
uint16_t homeY = 550; // raw data value for center of touchscreen
float convertX = 151.0 / 955.0; // converts raw x values to mm. found through manual calibration
float convertY = 91.0 / 927.0; // converts raw y values to mm. found through manual calibration
/////TIME SAMPLE
int Ts = 50;
unsigned long Stable=0;
//PID const
float Kp = 0.3;
float Ki = 0.03;
float Kd = 0.13;
float Kp1 = 0.3;
float Ki1 = 0.08;
float Kd1 = 0.13;
long cas=0;
//INIT PID
PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
PID myPID1(&Input1, &Output1, &Setpoint1,Kp1,Ki1,Kd1, DIRECT);
void setup()
{
servo1.attach(5);
servo2.attach(6);
Output=95;
Output1=95;
servo1.write(Output);
servo2.write(Output1);
//init NUN
nunchuk_setpowerpins();
nunchuk_init();
nunchuk_get_data();
//INIT PINS
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
digitalWrite(9,LOW); //LED INIT
digitalWrite(8,LOW);
Serial.begin(115200);
//INIT OF TOUSCHSCREEN
TSPoint p = ts.getPoint();
Input=120;
Input1=65;
//INIT SETPOINT
Setpoint=120;
Setpoint1=65;
//// Make plate flat
servo1.attach(5);
servo2.attach(6);
Output=95;
Output1=95;
servo1.write(Output);
servo2.write(Output1);
//Zapnutie PID
myPID.SetMode(AUTOMATIC);
myPID.SetOutputLimits(20, 160);
myPID1.SetMode(AUTOMATIC);
myPID1.SetOutputLimits(20, 160);
// TIME SAMPLE
myPID1.SetSampleTime(Ts);
myPID.SetSampleTime(Ts);
/////
delay(100);
///
}
void loop()
{
while(Stable<125) //REGULATION LOOP
{
TSPoint p = ts.getPoint(); //measure pressure on plate
if (p.z > ts.pressureThreshhold) //ball is on plate
{
servo1.attach(5); //connect servos
servo2.attach(6);
setDesiredPosition();
noTouchCount = 0;
TSPoint p = ts.getPoint(); // measure actual position
Input=(p.x * convertX); // read and convert X coordinate
Input1=(p.y * convertY); // read and convert Y coordinate
if((Input>Setpoint-2 && Input<Setpoint+2 && Input1>Setpoint1-2 && Input1<Setpoint1+2))//if ball is close to setpoint
{
Stable=Stable+1; //increment STABLE
digitalWrite(9,HIGH);
}
else
{
digitalWrite(9,LOW);
}
myPID.Compute(); //action control X compute
myPID1.Compute(); // action control Y compute
}
else //if there is no ball on plate
{
noTouchCount++; //increment no touch count
if(noTouchCount == 75)
{
noTouchCount++;
Output=95; //make plate flat
Output=93;
servo1.write(Output);
servo2.write(Output1);
}
if(noTouchCount == 150) //if there is no ball on plate longer
{
servo1.detach(); //detach servos
servo2.detach();
}
}
servo1.write(Output);//control
servo2.write(Output1);//control
Serial.print(Setpoint); Serial.print(","); Serial.print(Setpoint1); Serial.print(","); Serial.print(Input);Serial.print(","); Serial.println(Input1);
}////END OF REGULATION LOOP///
servo1.detach();//detach servos
servo2.detach();
///KONTROLA STABILITY////
while(Stable==125)//if is stable
{ //still measure actual postiion
setDesiredPosition();
TSPoint p = ts.getPoint();
Input=(p.x * convertX); //read X
Input1=(p.y * convertY); //read Y
if(Input<Setpoint-2 || Input>Setpoint+2 || Input1>Setpoint1+2 || Input1<Setpoint1-2 ) //if ball isnt close to setpoint
{
servo1.attach(5); //again attach servos
servo2.attach(6);
digitalWrite(9,LOW);
Stable=0; //change STABLE state
}
}//end of STABLE LOOP
}//loop end
////////////////////////Functions//////////////////
///// DESIRED POSITION
void setDesiredPosition()
{
nunchuk_get_data();
//if zbutton is pressed, zero positions
int c = nunchuk_zbutton();
if (c != lastButtonState) {
// if the state has changed, increment the counter
if (c == HIGH && digitalRead(11)==0 ) {
// if the current state is HIGH then the button
// wend from off to on:
buttonPushCounter++;
}
}
lastButtonState =c;
switch (buttonPushCounter)
{
case 1:
Setpoint=120;
Setpoint1=70;
fl=1;
break;
case 2:
Setpoint=52;
Setpoint1=70;
fl=2;
break;
case 3:
Setpoint=52;
Setpoint1=40;
fl=3;
break;
case 4:
Setpoint=120;
Setpoint1=40;
buttonPushCounter=0;
fl=4;
break;
}
if (nunchuk_cbutton()&&fl==1)///LEMNISCATE TRAJECOTRY
{
Setpoint = 85+ (50*cos(k))/(1+sin(k)*sin(k));
Setpoint1 = 55+ (50*sin(k)*cos(k))/(1+sin(k)*sin(k));
buttonPushCounter=0;
k=k+0.008;
}
if (nunchuk_cbutton()&&fl==2)// CIRCLE TRAJECTORY
{
Setpoint = 85+ 25*cos(k);
Setpoint1 = 55+ 25*sin(k);
buttonPushCounter=0;
k=k-0.02;
}
if (nunchuk_cbutton()&&fl==3)/// ELLIPSE TRAJECORY
{
Setpoint = 85+ 40*cos(k);
Setpoint1 = 55+ 25*sin(k);
buttonPushCounter=0;
k=k-0.02;
}
if (nunchuk_cbutton()&&fl==4) //PENTAGRAM TRAJECOTRY
{
Setpoint =85+ 18*cos(k)+12*cos(k*150);//
Setpoint1 =55+ 18*sin(k)-12*sin(k*150);//
buttonPushCounter=0;
k=k+0.01;
}
}




{kind=link}
Comments