


For the final project, I was very excited to put a body on my vehicle! However, I had some adjustments to make first.
- Figure out a better steering mechanism, as in a way to visualize the direction of the wheels
- Lower the chassis so it doesn't flip when going down hill
My solution for the steering mechanism was to attach a 16 pixel Adafruit NeoPixel ring to the top of my vehicle so that, depending on the angle of the servo, a specific number of pixels would light up to indicate the degree of the front steering wheel.
Lowering the chassis was straightforward, removing the legs from my previous design and turning the motors sideways. In the end, my vehicle did indeed go down the slope much smoother!
Problems: Because of other class conflicts, I was unable to complete my vehicle until rather late in the process and I'm not entirely satisfied with how it came out, specifically the steering wheel was not heavy enough, so the vehicle turns smoothly while driving backwards, but not well going forward -- it skids around.
In the eleventh hour, my NeoPixel ring snapped right off the body and I wasn't able to demonstrate it. However, I did enjoy being able to iterate through body designs to find an optimal design for the way I wanted to do this, using the laser cutter to quickly cut large shapes out of bristol paper, as well as utilizing the scanner to better measure the markings that I made on my various prototypes.
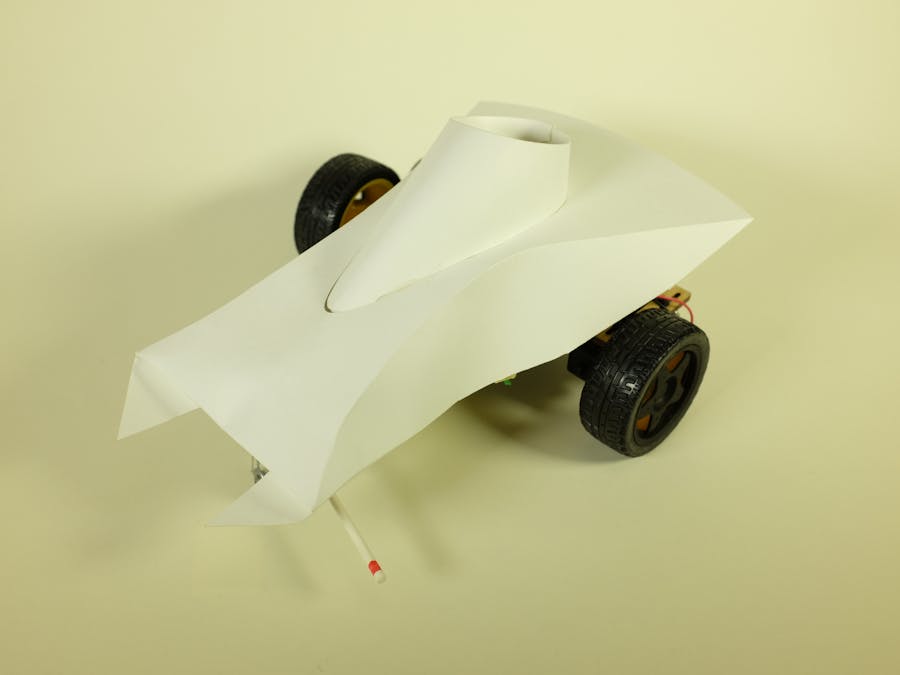
Some shots of the final vehicle:
I had a lot of fun building this and learning all about bending paper and using flat materials to turn them into curved shapes!
My wiring has not changed since the previous concept vehicle design.
A demo of the vehicle.
(By the way, my homework 4 hasn't been graded, I had emailed Michael about it, but never received a reply.)

Comments