


Finally at the last step!
This last part of the project took many, many, many hours.
First things first, I had to figure out the problem with my mechanism. After spending an hour in the lab with the instructors, the issue turned out to be a broken servo and a lack of power. To solve this, we replaced the servo, put two battery packs for the motors, and stopped feeding power through the controller. The idea was to simply take inputs from the controller and use software to implement the inputs, rather than directly using analog changes to alter the motion.
After assembling all of the pieces, it turned out that my chassis was unbalanced, being about as wide as it is long. I recut the chassis and made screw holes for the pieces. I forgot about the fact that I would be flipping the chassis over after cutting, so the holes were reversed. Then, the plugs for the Arduino were on the wrong side. Many holes later, my Arduino and H-bridge were successfully screwed on/zip-tied on. I also ended up recutting the L-shaped arm that held the steering front wheel in place, in order to screw it securely onto the servo to avoid wobbling.
For my protoshield, soldering went very smoothly! Everything worked well and the connections were clean. The only problem I encountered was properly cutting the female headers, which I solved by simply filing the cut edges so they sat flush against each other.
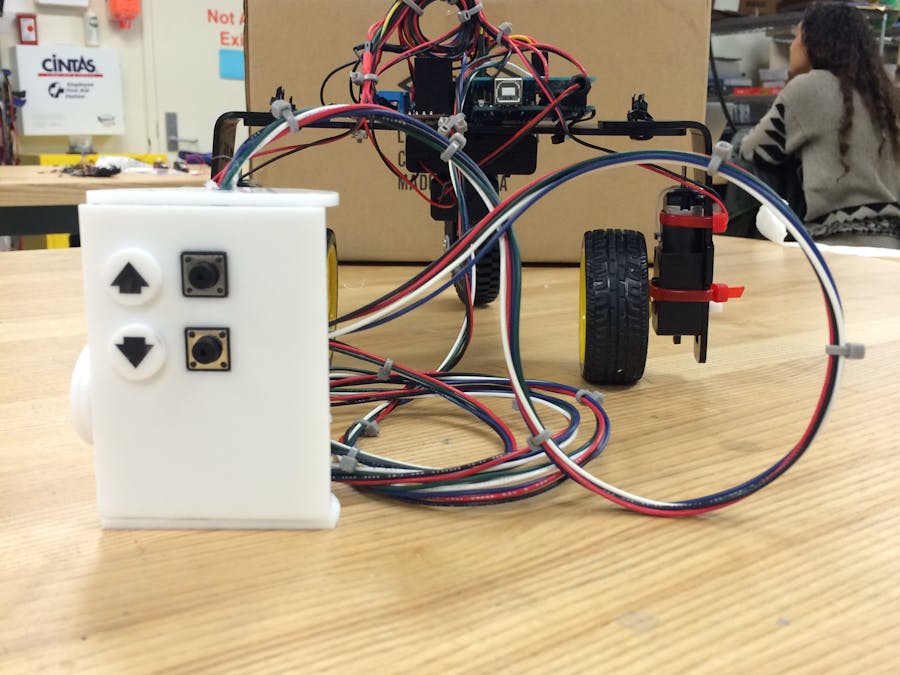
I decided to go with a simple controller shape, forming a hemisphere out of laser cut acrylic. Then, I soldered all the connections to perfboard, super glued pieces into their respective slots, and everything was ready!
Ultimately, the car worked great, but it was a little too fast to steer easily. I had a lot of fun building this (putting the stress aside haha).

Comments
Please log in or sign up to comment.