


Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
Cleaning and keeping a healthcare lounge room safe for patients may be a difficult task. Many elements got to be considered: furniture, electrical outlets, sanitiser dispensers, toys, and high-touch objects. And unlike patient rooms, there’s no turnover time between people where space can be cleaned or checked. Healthcare lounge rooms are challenging because you can’t control who is in there or what they touch. You can have children, adults, or seniors. We are to clean high-touch surfaces, if you have children in the room, every surface could be high touch!. Considering all these points, we can solve the issue by restricting the entry of people violating protective measures like wearing a mask in public, keeping social distancing, etc.
SolutionI build a device in which the people without a mask will be identified and alerted, also the entry to the lounge room will be restricted. considering the social distancing protocol the device can keep a count of people inside the lounge room and pass the information to the upcoming patients. the existing solution is carried out with manpower for ensuring these protocols are followed, with my solution the organization can reduce the manpower required and can keep the lounge room more healthy and confined space.
The results are processed from camera inputs and image processing, a trigger will send to the Core2 and the device can alert the patient to wear a mask to proceed. the camera inputs can be taken from the already installed CCTV in the premises and will be used for the mask identification, the image processing will be hosted on an AWS Instance or we can implement it through the raspberry pi and camera module. The entry will be restricted using automated gates. The camera feed from the lounge room as well as from the lounge entry the device can keep the count of people inside the lounge room. and will be displayed on the core2 device in real-time. for the alarms, the speaker inside core2 will be used. the raspberry pi and core2 will communicate with each other using the MQTT protocol for passing triggers and data.
Proof of Working
_m4Gph1Ku4H.jpeg)

_m4Gph1Ku4H.jpeg){kind=link}
{kind=link}
/*
* AWS IoT EduKit - Core2 for AWS IoT EduKit
* Cloud Connected Blinky v1.4.0
* main.c
*
* Copyright 2010-2015 Amazon.com, Inc. or its affiliates. All Rights Reserved.
* Additions Copyright 2016 Espressif Systems (Shanghai) PTE LTD
*
* Licensed under the Apache License, Version 2.0 (the "License").
* You may not use this file except in compliance with the License.
* A copy of the License is located at
*
* http://aws.amazon.com/apache2.0
*
* or in the "license" file accompanying this file. This file is distributed
* on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either
* express or implied. See the License for the specific language governing
* permissions and limitations under the License.
*/
/**
* @file main.c
* @brief simple MQTT publish and subscribe for use with AWS IoT EduKit reference hardware.
*
* This example takes the parameters from the build configuration and establishes a connection to AWS IoT Core over MQTT.
*
* Some configuration is required. Visit https://edukit.workshop.aws
*
*/
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>
#include <unistd.h>
#include <limits.h>
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/semphr.h"
#include "freertos/event_groups.h"
#include "esp_log.h"
#include "aws_iot_config.h"
#include "aws_iot_log.h"
#include "aws_iot_version.h"
#include "aws_iot_mqtt_client_interface.h"
#include "core2forAWS.h"
#include "wifi.h"
#include "blink.h"
#include "ui.h"
TaskHandle_t mic_handle, speaker_handle, atecc_handle;
/* The time between each MQTT message publish in milliseconds */
#define PUBLISH_INTERVAL_MS 3000
/* The time prefix used by the logger. */
static const char *TAG = "MAIN";
/* The FreeRTOS task handler for the blink task that can be used to control the task later */
TaskHandle_t xBlink;
TaskHandle_t xGreen;
/* CA Root certificate */
extern const uint8_t aws_root_ca_pem_start[] asm("_binary_aws_root_ca_pem_start");
extern const uint8_t aws_root_ca_pem_end[] asm("_binary_aws_root_ca_pem_end");
/* Default MQTT HOST URL is pulled from the aws_iot_config.h */
char HostAddress[255] = AWS_IOT_MQTT_HOST;
/* Default MQTT port is pulled from the aws_iot_config.h */
uint32_t port = AWS_IOT_MQTT_PORT;
void speakerTask(void *arg);
void iot_subscribe_callback_handler(AWS_IoT_Client *pClient, char *topicName, uint16_t topicNameLen,
IoT_Publish_Message_Params *params, void *pData) {
ESP_LOGI(TAG, "Subscribe callback");
ESP_LOGI(TAG, "%.*s\t%.*s", topicNameLen, topicName, (int) params->payloadLen, (char *)params->payload);
if (strstr(topicName, "/blink") != NULL) {
// Get state of the FreeRTOS task, "blinkTask", using it's task handle.
// Suspend or resume the task depending on the returned task state
eTaskState blinkState = eTaskGetState(xBlink);
if (blinkState == eSuspended){
vTaskResume(xBlink);
} else{
vTaskSuspend(xBlink);
}
}
if (strstr(topicName, "/Green") != NULL) {
// Get state of the FreeRTOS task, "blinkTask", using it's task handle.
// Suspend or resume the task depending on the returned task state
eTaskState blinkState = eTaskGetState(xGreen);
if (blinkState == eSuspended){
vTaskResume(xGreen);
} else{
vTaskSuspend(xGreen);
}
}
}
void disconnect_callback_handler(AWS_IoT_Client *pClient, void *data) {
ESP_LOGW(TAG, "MQTT Disconnect");
ui_textarea_add("Disconnected from AWS IoT Core...", NULL, 0);
IoT_Error_t rc = FAILURE;
if(pClient == NULL) {
return;
}
if(aws_iot_is_autoreconnect_enabled(pClient)) {
ESP_LOGI(TAG, "Auto Reconnect is enabled, Reconnecting attempt will start now");
} else {
ESP_LOGW(TAG, "Auto Reconnect not enabled. Starting manual reconnect...");
rc = aws_iot_mqtt_attempt_reconnect(pClient);
if(NETWORK_RECONNECTED == rc) {
ESP_LOGW(TAG, "Manual Reconnect Successful");
} else {
ESP_LOGW(TAG, "Manual Reconnect Failed - %d", rc);
}
}
}
static void publisher(AWS_IoT_Client *client, char *base_topic, uint16_t base_topic_len){
char cPayload[100];
int32_t i = 0;
IoT_Publish_Message_Params paramsQOS0;
IoT_Publish_Message_Params paramsQOS1;
paramsQOS0.qos = QOS0;
paramsQOS0.payload = (void *) cPayload;
paramsQOS0.isRetained = 0;
// Publish and ignore if "ack" was received or from AWS IoT Core
sprintf(cPayload, "%s : %d ", "Hello from AWS IoT EduKit (QOS0)", i++);
paramsQOS0.payloadLen = strlen(cPayload);
IoT_Error_t rc = aws_iot_mqtt_publish(client, base_topic, base_topic_len, ¶msQOS0);
if (rc != SUCCESS){
ESP_LOGE(TAG, "Publish QOS0 error %i", rc);
rc = SUCCESS;
}
paramsQOS1.qos = QOS1;
paramsQOS1.payload = (void *) cPayload;
paramsQOS1.isRetained = 0;
// Publish and check if "ack" was sent from AWS IoT Core
sprintf(cPayload, "%s : %d ", "Hello from AWS IoT EduKit (QOS1)", i++);
paramsQOS1.payloadLen = strlen(cPayload);
rc = aws_iot_mqtt_publish(client, base_topic, base_topic_len, ¶msQOS1);
if (rc == MQTT_REQUEST_TIMEOUT_ERROR) {
ESP_LOGW(TAG, "QOS1 publish ack not received.");
rc = SUCCESS;
}
}
void aws_iot_task(void *param) {
IoT_Error_t rc = FAILURE;
AWS_IoT_Client client;
IoT_Client_Init_Params mqttInitParams = iotClientInitParamsDefault;
IoT_Client_Connect_Params connectParams = iotClientConnectParamsDefault;
ESP_LOGI(TAG, "AWS IoT SDK Version %d.%d.%d-%s", VERSION_MAJOR, VERSION_MINOR, VERSION_PATCH, VERSION_TAG);
mqttInitParams.enableAutoReconnect = false; // We enable this later below
mqttInitParams.pHostURL = HostAddress;
mqttInitParams.port = port;
mqttInitParams.pRootCALocation = (const char *)aws_root_ca_pem_start;
mqttInitParams.pDeviceCertLocation = "#";
mqttInitParams.pDevicePrivateKeyLocation = "#0";
#define CLIENT_ID_LEN (ATCA_SERIAL_NUM_SIZE * 2)
#define SUBSCRIBE_TOPIC_LEN (CLIENT_ID_LEN + 3)
#define BASE_PUBLISH_TOPIC_LEN (CLIENT_ID_LEN + 2)
char *client_id = malloc(CLIENT_ID_LEN + 1);
ATCA_STATUS ret = Atecc608_GetSerialString(client_id);
if (ret != ATCA_SUCCESS)
{
printf("Failed to get device serial from secure element. Error: %i", ret);
abort();
}
char subscribe_topic[SUBSCRIBE_TOPIC_LEN];
char base_publish_topic[BASE_PUBLISH_TOPIC_LEN];
snprintf(subscribe_topic, SUBSCRIBE_TOPIC_LEN, "%s/#", client_id);
snprintf(base_publish_topic, BASE_PUBLISH_TOPIC_LEN, "%s/", client_id);
mqttInitParams.mqttCommandTimeout_ms = 20000;
mqttInitParams.tlsHandshakeTimeout_ms = 5000;
mqttInitParams.isSSLHostnameVerify = true;
mqttInitParams.disconnectHandler = disconnect_callback_handler;
mqttInitParams.disconnectHandlerData = NULL;
rc = aws_iot_mqtt_init(&client, &mqttInitParams);
if(SUCCESS != rc) {
ESP_LOGE(TAG, "aws_iot_mqtt_init returned error : %d ", rc);
abort();
}
/* Wait for WiFI to show as connected */
xEventGroupWaitBits(wifi_event_group, CONNECTED_BIT,
false, true, portMAX_DELAY);
connectParams.keepAliveIntervalInSec = 10;
connectParams.isCleanSession = true;
connectParams.MQTTVersion = MQTT_3_1_1;
connectParams.pClientID = client_id;
connectParams.clientIDLen = CLIENT_ID_LEN;
connectParams.isWillMsgPresent = false;
ui_textarea_add("Connecting to AWS IoT Core...\n", NULL, 0);
ESP_LOGI(TAG, "Connecting to AWS IoT Core at %s:%d", mqttInitParams.pHostURL, mqttInitParams.port);
do {
rc = aws_iot_mqtt_connect(&client, &connectParams);
if(SUCCESS != rc) {
ESP_LOGE(TAG, "Error(%d) connecting to %s:%d", rc, mqttInitParams.pHostURL, mqttInitParams.port);
vTaskDelay(pdMS_TO_TICKS(1000));
}
} while(SUCCESS != rc);
ui_textarea_add("Successfully connected!\n", NULL, 0);
ESP_LOGI(TAG, "Successfully connected to AWS IoT Core!");
/*
* Enable Auto Reconnect functionality. Minimum and Maximum time for exponential backoff for retries.
* #AWS_IOT_MQTT_MIN_RECONNECT_WAIT_INTERVAL
* #AWS_IOT_MQTT_MAX_RECONNECT_WAIT_INTERVAL
*/
rc = aws_iot_mqtt_autoreconnect_set_status(&client, true);
if(SUCCESS != rc) {
ui_textarea_add("Unable to set Auto Reconnect to true\n", NULL, 0);
ESP_LOGE(TAG, "Unable to set Auto Reconnect to true - %d", rc);
abort();
}
ESP_LOGI(TAG, "Subscribing to '%s'", subscribe_topic);
rc = aws_iot_mqtt_subscribe(&client, subscribe_topic, strlen(subscribe_topic), QOS0, iot_subscribe_callback_handler, NULL);
if(SUCCESS != rc) {
ui_textarea_add("Error subscribing\n", NULL, 0);
ESP_LOGE(TAG, "Error subscribing : %d ", rc);
abort();
} else{
ui_textarea_add("Subscribed to topic: %s\n\n", subscribe_topic, SUBSCRIBE_TOPIC_LEN) ;
ESP_LOGI(TAG, "Subscribed to topic '%s'", subscribe_topic);
}
ESP_LOGI(TAG, "\n****************************************\n* AWS client Id - %s *\n****************************************\n\n",
client_id);
ui_textarea_add("Attempting publish to: %s\n", base_publish_topic, BASE_PUBLISH_TOPIC_LEN) ;
while((NETWORK_ATTEMPTING_RECONNECT == rc || NETWORK_RECONNECTED == rc || SUCCESS == rc)) {
//Max time the yield function will wait for read messages
rc = aws_iot_mqtt_yield(&client, 100);
if(NETWORK_ATTEMPTING_RECONNECT == rc) {
// If the client is attempting to reconnect we will skip the rest of the loop.
continue;
}
ESP_LOGD(TAG, "Stack remaining for task '%s' is %d bytes", pcTaskGetTaskName(NULL), uxTaskGetStackHighWaterMark(NULL));
vTaskDelay(pdMS_TO_TICKS(PUBLISH_INTERVAL_MS));
publisher(&client, base_publish_topic, BASE_PUBLISH_TOPIC_LEN);
}
ESP_LOGE(TAG, "An error occurred in the main loop.");
abort();
}
void app_main()
{
Core2ForAWS_Init();
Core2ForAWS_Display_SetBrightness(100);
ui_init();
initialise_wifi();
xTaskCreatePinnedToCore(&aws_iot_task, "aws_iot_task", 4096 * 2, NULL, 5, NULL, 1);
xTaskCreatePinnedToCore(&blink_task, "blink_task", 4096 * 1, NULL, 2, &xBlink, 1);
xTaskCreatePinnedToCore(&green_task, "green_task", 4096 * 1, NULL, 2, &xGreen, 1);
}
/*
* AWS IoT EduKit - Core2 for AWS IoT EduKit
* Smart Thermostat v1.3.0
* ui.c
*
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*/
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/semphr.h"
#include "esp_log.h"
#include "core2forAWS.h"
#include "ui.h"
#define MAX_TEXTAREA_LENGTH 1024
static lv_obj_t *active_screen;
static lv_obj_t *out_txtarea;
static lv_obj_t *wifi_label;
static lv_obj_t *red_label;
static lv_obj_t* red_lmeter;
static lv_obj_t* door_label;
static lv_obj_t* mqtt_btn;
static lv_obj_t* mqtt_label;
static char *TAG = "UI";
static void mqtt_event_handler(lv_obj_t* button, lv_event_t event);
static void ui_textarea_prune(size_t new_text_length){
const char * current_text = lv_textarea_get_text(out_txtarea);
size_t current_text_len = strlen(current_text);
if(current_text_len + new_text_length >= MAX_TEXTAREA_LENGTH){
for(int i = 0; i < new_text_length; i++){
lv_textarea_set_cursor_pos(out_txtarea, 0);
lv_textarea_del_char_forward(out_txtarea);
}
lv_textarea_set_cursor_pos(out_txtarea, LV_TEXTAREA_CURSOR_LAST);
}
}
void ui_textarea_add(char *baseTxt, char *param, size_t paramLen) {
if( baseTxt != NULL ){
xSemaphoreTake(xGuiSemaphore, portMAX_DELAY);
if (param != NULL && paramLen != 0){
size_t baseTxtLen = strlen(baseTxt);
ui_textarea_prune(paramLen);
size_t bufLen = baseTxtLen + paramLen;
char buf[(int) bufLen];
sprintf(buf, baseTxt, param);
lv_textarea_add_text(out_txtarea, buf);
}
else{
lv_textarea_add_text(out_txtarea, baseTxt);
}
xSemaphoreGive(xGuiSemaphore);
}
else{
ESP_LOGE(TAG, "Textarea baseTxt is NULL!");
}
}
void ui_wifi_label_update(bool state){
xSemaphoreTake(xGuiSemaphore, portMAX_DELAY);
if (state == false) {
lv_label_set_text(wifi_label, LV_SYMBOL_WIFI);
}
else{
char buffer[25];
sprintf (buffer, "#0000ff %s #", LV_SYMBOL_WIFI);
lv_label_set_text(wifi_label, buffer);
}
xSemaphoreGive(xGuiSemaphore);
}
void ui_meter_update(uint32_t value){
xSemaphoreTake(xGuiSemaphore, portMAX_DELAY);
lv_linemeter_set_value(red_lmeter, value);
lv_label_set_text_fmt(red_label, "CO2: %d ppm", value);
xSemaphoreGive(xGuiSemaphore);
}
void ui_door_label_update(char *txt) {
xSemaphoreTake(xGuiSemaphore, portMAX_DELAY);
lv_label_set_static_text(door_label, txt);
xSemaphoreGive(xGuiSemaphore);
}
uint8_t ui_mqtt_get_value() {
return lv_switch_get_state(mqtt_btn);
}
static void mqtt_event_handler(lv_obj_t* obj, lv_event_t event){
if(event == LV_EVENT_VALUE_CHANGED) {
uint8_t value = lv_switch_get_state(obj);
if(value == 1) {
lv_label_set_static_text(mqtt_label, "DOOR OPEN");
} else {
lv_label_set_static_text(mqtt_label, "DOOR CLOSED");
}
ESP_LOGI(TAG, "Door state: %x", value);
}
}
void ui_init() {
xSemaphoreTake(xGuiSemaphore, portMAX_DELAY);
active_screen = lv_scr_act();
wifi_label = lv_label_create(active_screen, NULL);
lv_obj_align(wifi_label,NULL,LV_ALIGN_IN_TOP_RIGHT, 0, 6);
lv_label_set_text(wifi_label, LV_SYMBOL_WIFI);
lv_label_set_recolor(wifi_label, true);
out_txtarea = lv_textarea_create(active_screen, NULL);
lv_obj_set_size(out_txtarea, 300, 50);
lv_obj_align(out_txtarea, NULL, LV_ALIGN_IN_TOP_MID, 0, 30);
lv_textarea_set_max_length(out_txtarea, MAX_TEXTAREA_LENGTH);
lv_textarea_set_text_sel(out_txtarea, false);
lv_textarea_set_cursor_hidden(out_txtarea, true);
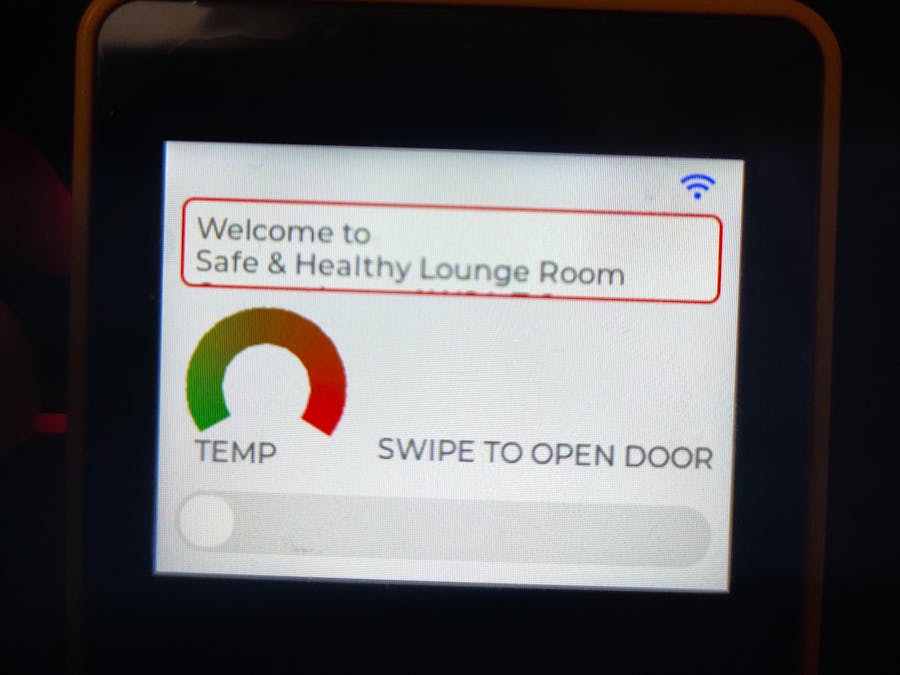
lv_textarea_set_text(out_txtarea, "Welcome to\nSafe & Healthy Lounge Room\n");
red_lmeter = lv_linemeter_create(active_screen, NULL);
red_label = lv_label_create(active_screen, NULL);
lv_label_set_static_text(red_label, "TEMP");
lv_obj_align(red_label, active_screen, LV_ALIGN_IN_BOTTOM_LEFT, 20, -60);
static lv_style_t red_lmeter_style;
lv_style_init(&red_lmeter_style);
lv_style_set_line_color(&red_lmeter_style, LV_STATE_DEFAULT, LV_COLOR_GREEN);
lv_style_set_scale_grad_color(&red_lmeter_style, 40, LV_COLOR_RED);
lv_style_set_border_opa(&red_lmeter_style, LV_STATE_DEFAULT, LV_OPA_TRANSP);
lv_style_set_bg_opa(&red_lmeter_style, LV_STATE_DEFAULT, LV_OPA_TRANSP);
lv_style_set_scale_end_color(&red_lmeter_style, LV_STATE_DEFAULT, LV_COLOR_WHITE);
lv_linemeter_set_range(red_lmeter, 0, 3000); //Set the range
lv_linemeter_set_value(red_lmeter, 3000); //*Set the current value
lv_linemeter_set_scale(red_lmeter, 240, 41); //Set the angle and number of lines
lv_obj_add_style(red_lmeter, LV_LINEMETER_PART_MAIN, &red_lmeter_style);
lv_obj_set_size(red_lmeter, 120, 120);
lv_obj_align(red_lmeter, NULL, LV_ALIGN_IN_TOP_LEFT, 0, 75);
// door_label = lv_label_create(active_screen, NULL);
// lv_label_set_static_text(door_label, "Door Closed");
// lv_obj_align(door_label, active_screen, LV_ALIGN_IN_BOTTOM_RIGHT, 0, -45);
mqtt_label = lv_label_create(active_screen, NULL);
lv_label_set_static_text(mqtt_label, "SWIPE TO OPEN DOOR");
lv_obj_align(mqtt_label, active_screen, LV_ALIGN_IN_BOTTOM_RIGHT, -10, -65);
mqtt_btn = lv_switch_create(active_screen, NULL);
lv_obj_set_size(mqtt_btn, 300, 35);
lv_obj_set_event_cb(mqtt_btn, mqtt_event_handler);
lv_switch_off(mqtt_btn, LV_ANIM_OFF);
lv_obj_align(mqtt_btn, active_screen, LV_ALIGN_CENTER, 0, 90);
xSemaphoreGive(xGuiSemaphore);
}
/*
* AWS IoT EduKit - Core2 for AWS IoT EduKit
* Cloud Connected Blinky v1.4.0
* blink.c
*
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*/
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/semphr.h"
#include "esp_log.h"
#include "core2forAWS.h"
#include "blink.h"
static const char *TAG = "Blink";
void blink_task(void *arg) {
vTaskSuspend( NULL );
while (1) {
Speaker_Init();
Core2ForAWS_Speaker_Enable(1);
Core2ForAWS_Sk6812_Clear();
Core2ForAWS_Sk6812_Show();
while (1) {
// Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_LEFT, 0xff0000);
// Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_RIGHT, 0xff0000);
// Core2ForAWS_Sk6812_Show();
// Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_LEFT, 0x00ff00);
// Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_RIGHT, 0x00ff00);
// Core2ForAWS_Sk6812_Show();
extern const unsigned char music[120264];
Speaker_WriteBuff((uint8_t *)music, 120264, portMAX_DELAY);
for (uint8_t i = 0; i < 5; i++) {
Core2ForAWS_Sk6812_SetColor(i, 0xff0000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 10; i > 4 ; i--) {
Core2ForAWS_Sk6812_SetColor(i, 0xff0000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 0; i < 5; i++) {
Core2ForAWS_Sk6812_SetColor(i, 0x000000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 10; i > 4; i--) {
Core2ForAWS_Sk6812_SetColor(i, 0x000000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_LEFT, 0xff0000);
Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_RIGHT, 0xff0000);
Core2ForAWS_Sk6812_Show();
extern const unsigned char music[120264];
Speaker_WriteBuff((uint8_t *)music, 120264, portMAX_DELAY);
for (uint8_t i = 40; i > 0; i--) {
Core2ForAWS_Sk6812_SetBrightness(i);
Core2ForAWS_Sk6812_Show();
vTaskDelay(25 / portTICK_PERIOD_MS);
}
Core2ForAWS_Sk6812_SetBrightness(20);
}
}
// Should never get here. FreeRTOS tasks loop forever.
ESP_LOGE(TAG, "Error in blink task. Out of loop.");
Core2ForAWS_Speaker_Enable(0);
Speaker_Deinit();
abort();
}
void green_task(void *arg) {
vTaskSuspend( NULL );
while (1) {
Speaker_Init();
Core2ForAWS_Speaker_Enable(1);
Core2ForAWS_Sk6812_Clear();
Core2ForAWS_Sk6812_Show();
while (1) {
extern const unsigned char music[120264];
Speaker_WriteBuff((uint8_t *)music, 120264, portMAX_DELAY);
for (uint8_t i = 0; i < 5; i++) {
Core2ForAWS_Sk6812_SetColor(i, 0x00ff00);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 10; i > 4 ; i--) {
Core2ForAWS_Sk6812_SetColor(i, 0x00ff00);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 0; i < 5; i++) {
Core2ForAWS_Sk6812_SetColor(i, 0x000000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
for (uint8_t i = 10; i > 4; i--) {
Core2ForAWS_Sk6812_SetColor(i, 0x000000);
Core2ForAWS_Sk6812_Show();
vTaskDelay(100 / portTICK_PERIOD_MS);
}
Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_LEFT, 0x00ff00);
Core2ForAWS_Sk6812_SetSideColor(SK6812_SIDE_RIGHT, 0x00ff00);
Core2ForAWS_Sk6812_Show();
for (uint8_t i = 40; i > 0; i--) {
Core2ForAWS_Sk6812_SetBrightness(i);
Core2ForAWS_Sk6812_Show();
vTaskDelay(25 / portTICK_PERIOD_MS);
}
Core2ForAWS_Sk6812_SetBrightness(20);
}
}
// Should never get here. FreeRTOS tasks loop forever.
ESP_LOGE(TAG, "Error in blink task. Out of loop.");
Core2ForAWS_Speaker_Enable(0);
Speaker_Deinit();
abort();
}
/*
* AWS IoT EduKit - Core2 for AWS IoT EduKit
* Cloud Connected Blinky v1.4.0
* blink.h
*
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*/
TaskHandle_t xBlink;
void blink_task(void *arg);
void green_task(void *arg);

Comments