

Hardware components | ||||||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
This IOT Project uses three Particle Argons to monitor and control systems based on the current lake conditions.
Using one of the two of the Argons on-site, three conditions of the lake are recorded: temperature, water level, and if the boat lift is raised or lowered. These conditions, namely water level, are important to observe because of systems reliant on these variables. In this case, there is a sprinkler system that uses the lake water, via a water pump. If this pump begins working with the water level too low, it will intake air, which can severely damage the pump and sprinkler system.
Using information gathered by the Argon with sensors, the second Argon on-site can control the on/off state of the sprinkler.
A third Argon is also used in this project to have the data reported anywhere without having to access the Particle console or site.
Using this setup of a Sensor- dedicated Argon, a Manager Argon, and a Reporter Argon, any other system or variable could be added to the lake, and managing property much more convenient.
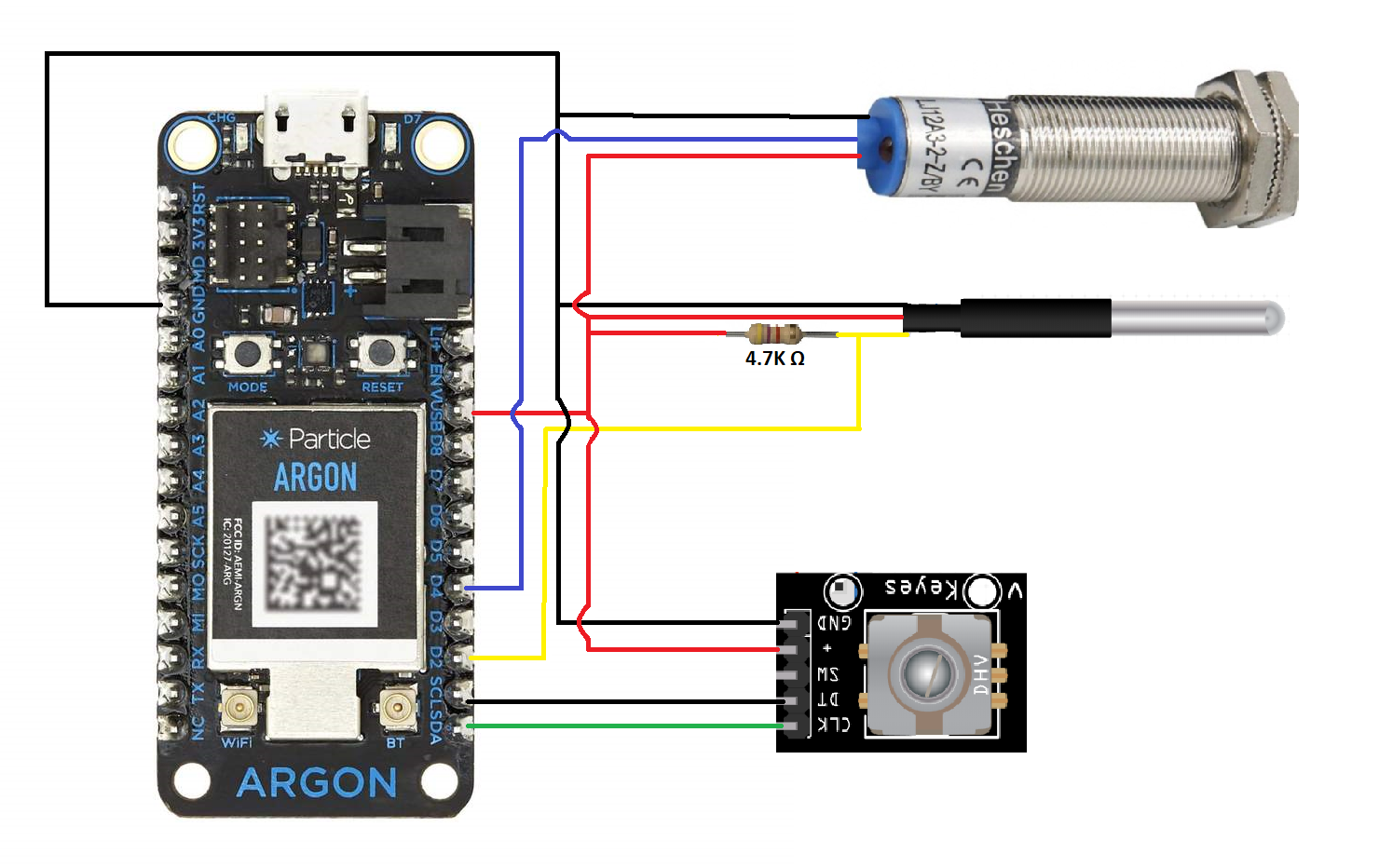
Argon 1 is attached to a
- Rotary encoder,
- Temperature sensor
- Hall effect sensor
As seen below.
The rotary encoder corresponds to a water level reading of the lake. To accomplish this, two weights are attached to a cord wrapped around a spool which is being observed by the encoder. As the dock that the system is attached to rises or sinks with the level, the heavier of the two weights remains on the bottom of the lake, while the other weight will be moved due to the tension in the rope. This causes the rotary encoder to change reading and report a new level instantaneously.
The temperature sensor is placed slightly below the surface of the water and reports the lake temperature every 5 minutes.
The hall effect sensor monitors the boat lift and its status: whether it is raised or is it is lowered.
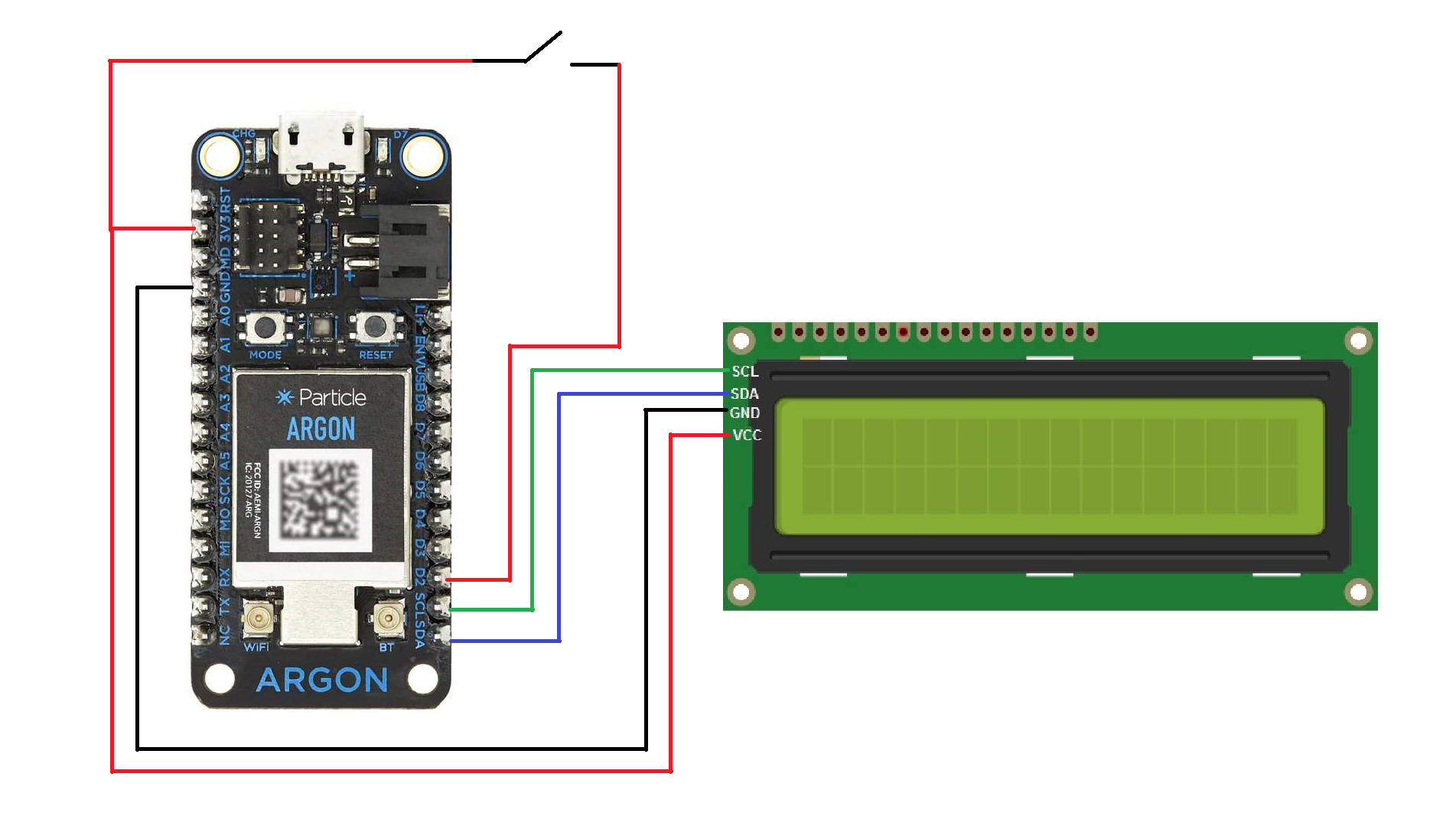
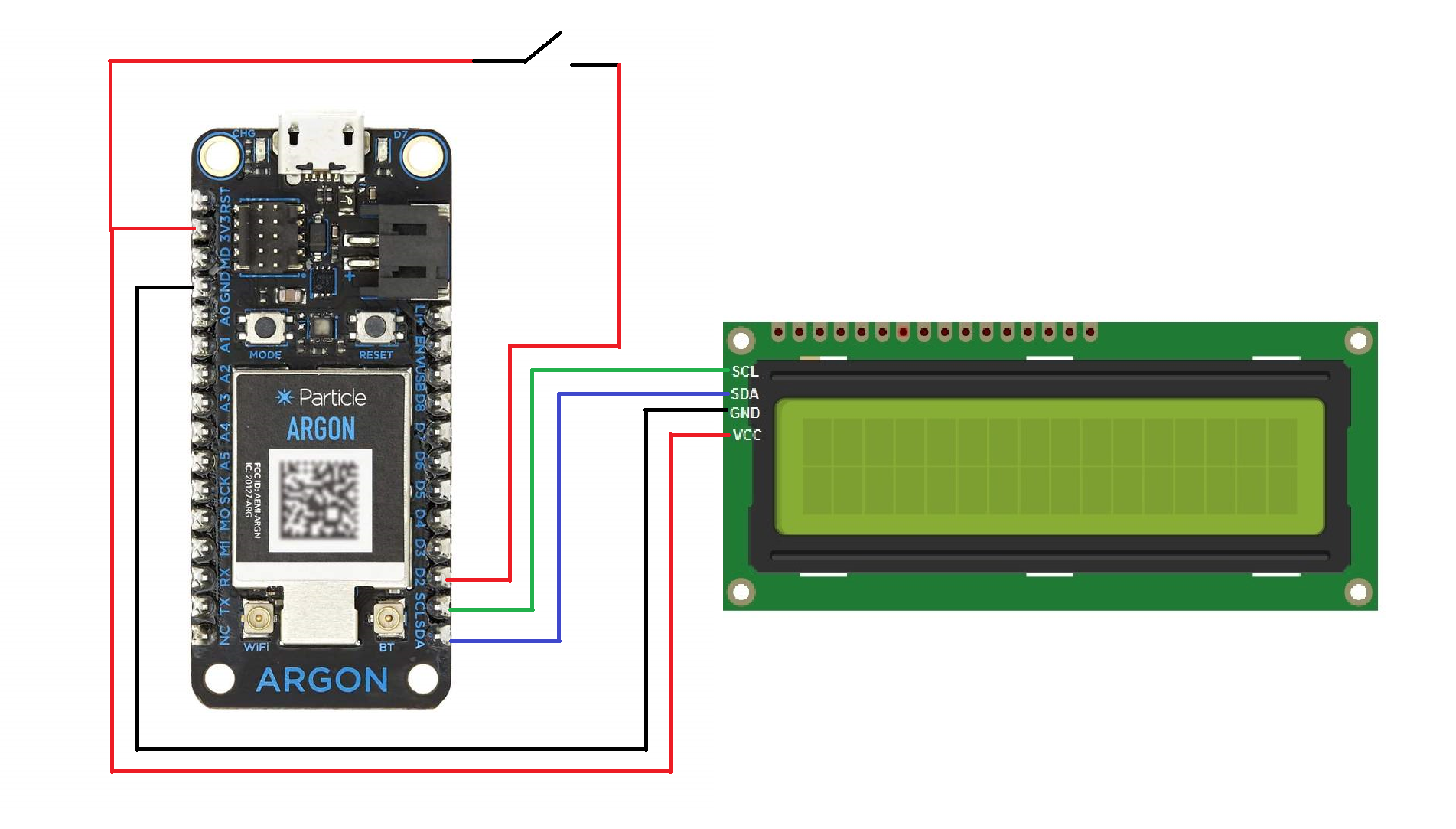
These three data points are displayed on the Argon 2 setup, which is attached to an LCD screen. Argon 1 publishes the current level reading, temperature reading, and hall effect status, to which Argon 2 subscribes the data and displays the data on the LCD screen.
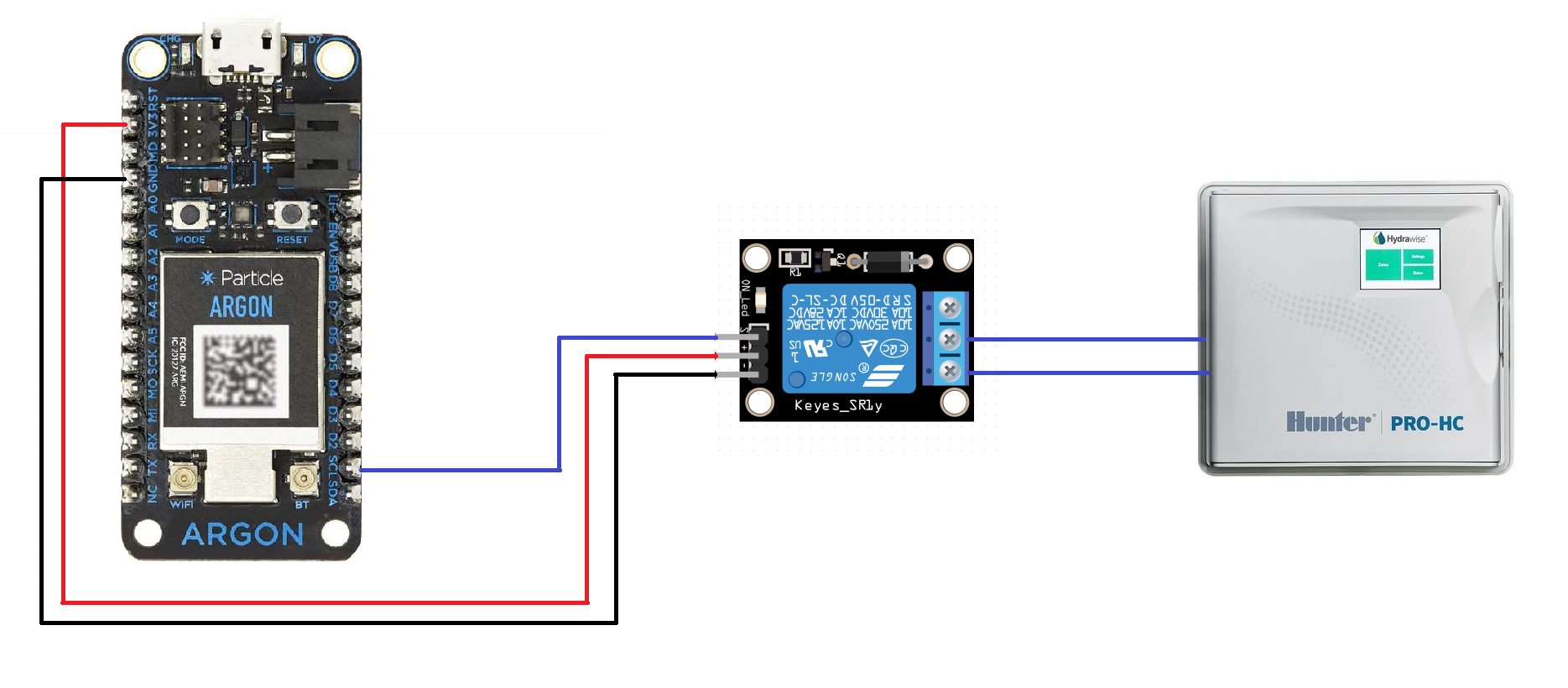
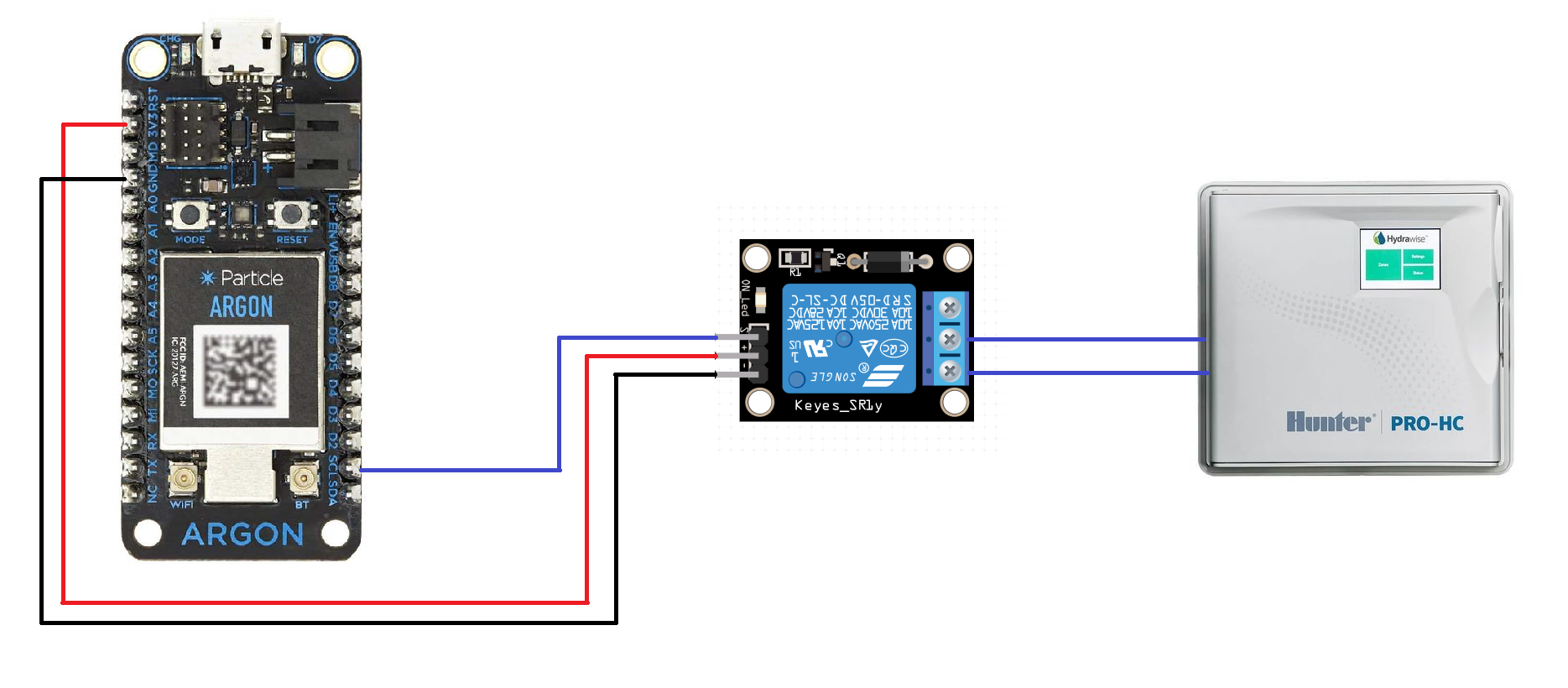
Argon 1 also sends the lake level data to Argon 3, which is attached to a relay circuit. This circuit either allows the irrigation system to run or will tell it to cancel watering. Argon 3 only uses the relay to complete the circuit and activate the pump if Argon 1 reports a satisfactory level reading, otherwise, the relay will remain off. Should Argon 3 have to restart or is reset, it will ensure the relay is currently off by prompting Argon 1 for a report of the water level.
Another failsafe to prevent damages to the sprinkler system is the manual irrigation override that is attached to Argon 2. This is a simple button that toggles the status of the relay. This communicates to Argon 1 that a toggle is needed, which then sends the command to Argon 3. This allows for the sprinklers to be shut off even if the water level is satisfactory, or for the pump to be activated without the preferred water level. Having this switch also helps protect the sprinkler system should the sensors report wrong data and no one is on-site to repair or disable the system.
All data is then sent to ThingSpeak for graphing, which can be seen here: https://thingspeak.com/channels/1569523


{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.