



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 8 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
 |
| × | 6 | |||
 |
| × | 1 | |||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
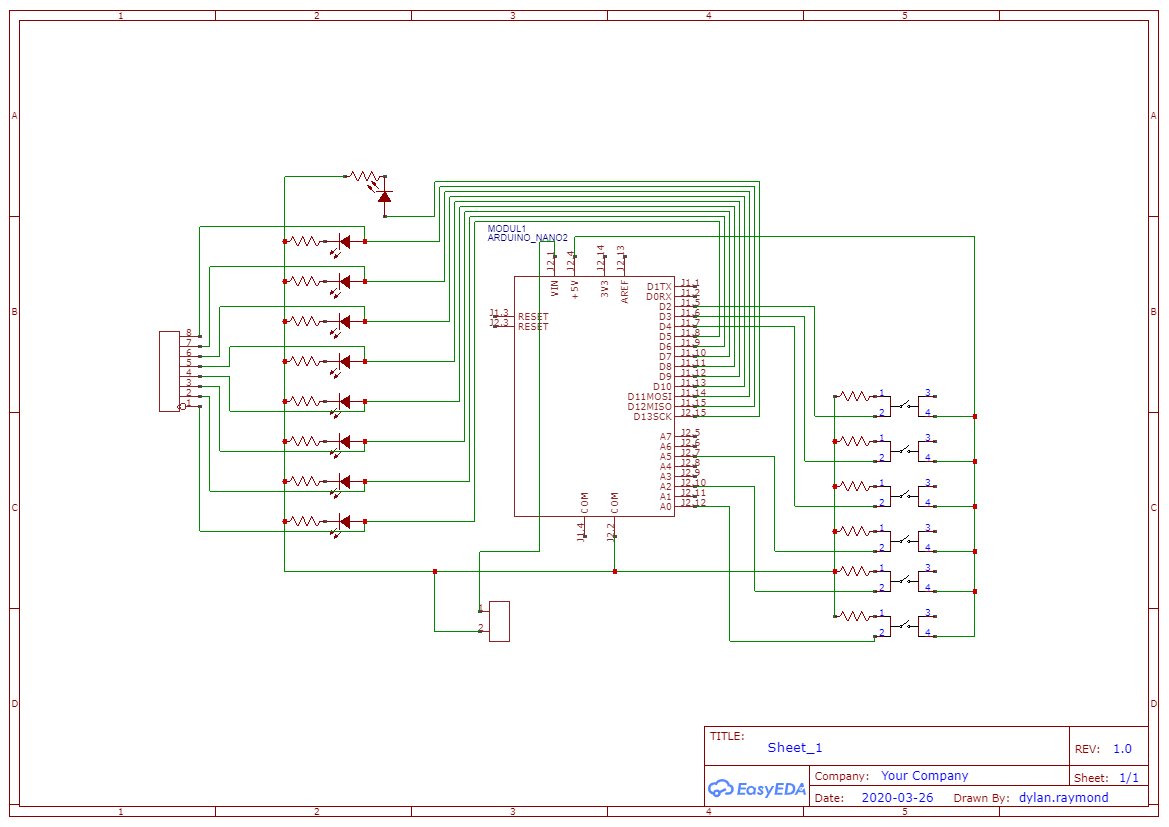
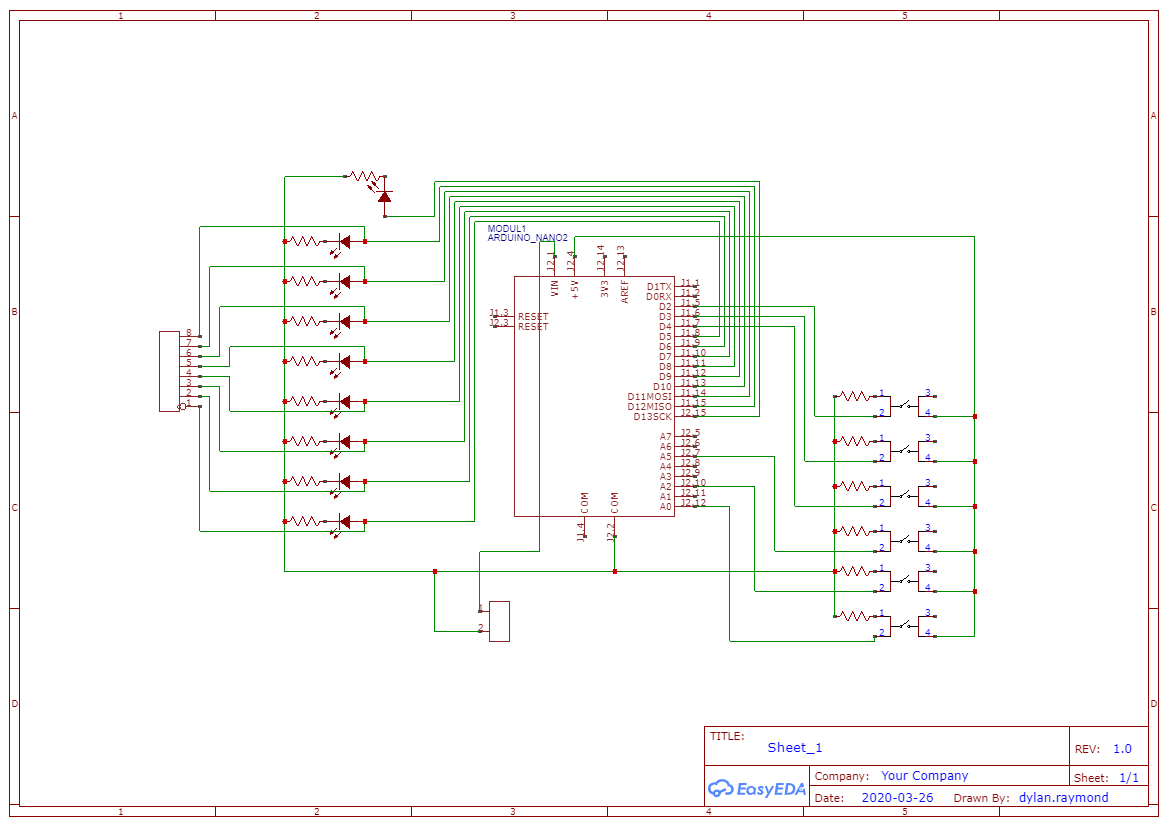
I wanted to see how hard it would be to make this.
this is a traffic advisor controller.
it controls 8 light segments and has a small led readout to show you what pattern is currently being used.
a power light to show that power is on.
6 buttons that do various actions
button 1: left arrow
button 2: center out
button 3: right arrow
button 4: warning patterns
button 5: switch warning pattern
button 6: turn off lights/ save warning pattern
there are the 3 directional patterns and 10 warning patterns.
any mode can be activated at any time with no delay.
warning patterns are:
1:even / odd fast flash
2: half and half
3: half and half with fast flash
4: 2 by 2
5: 2 by 2 parallel
6: out flash
7: 3 out center
8: outboard
9:inboard
10: even / odd slow
#include <EEPROM.h>
int warning_button = A5;
int left_button = 2;
int center_button = 4;
int right_button = 3;
int off_button = A0;
int pattern_button = A2;
int statuslight = 13;
int LEDright[] = {5, 6, 7, 8, 9, 10, 11, 12};
int LEDleft[] = {12, 11, 10, 9, 8, 7, 6, 5};
int centerleft[] = {9, 10, 11, 12};
int centerright[] = {8, 7, 6, 5};
int light = 0;
int counter = 1;
int pattern_count = 0;
int warning_count = EEPROM.read(0);
long lasttimer = 0;
static long timer = 200;
static long timer2 = 300;
static long switch_timer = 4000;
#define LEFTside 0x0
#define RIGHTside 0x1
byte whichLED = LEFTside;
byte LEFT_state = LOW;
byte RIGHT_state = LOW;
unsigned long switchDelay = 1000;
unsigned long switchDelay2 = 500;
unsigned long strobeDelay = 75;
unsigned long strobeWait = strobeDelay;
unsigned long waitUntilSwitch = switchDelay;
unsigned long sequenceStartTime;
//----------------------------------------------------------------------------
void setup() {
Serial.begin(9600);
for (int i = 0; i < 8; i++) {
pinMode(LEDright[i], OUTPUT);
}
pinMode(statuslight, OUTPUT);
pinMode(warning_button, INPUT_PULLUP);
pinMode(left_button, INPUT_PULLUP);
pinMode(center_button, INPUT_PULLUP);
pinMode(right_button, INPUT_PULLUP);
pinMode(off_button, INPUT_PULLUP);
pinMode(pattern_button, INPUT_PULLUP);
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
pinMode(5, OUTPUT);
}
//------------------------------------------------------------------------
void loop() {
digitalWrite(13, HIGH);
delayMicroseconds(10); // Approximately 10% duty cycle @ 1KHz
digitalWrite(13, LOW);
delayMicroseconds(1000 - 10);
if (digitalRead(pattern_button) == HIGH)
{
delay(500);
warning_count++;
if (warning_count > 10) {
warning_count = 1;
}
}
if (digitalRead(warning_button) == HIGH)
{
delay(50);
pattern_count = 1;
}
if (digitalRead(left_button) == HIGH)
{
delay(50);
pattern_count = 2;
}
if (digitalRead(center_button) == HIGH)
{
delay(50);
pattern_count = 3;
}
if (digitalRead(right_button) == HIGH)
{
delay(50);
pattern_count = 4;
}
if (digitalRead(off_button) == HIGH)
{
delay(50);
pattern_count = 0;
EEPROM.update(0,warning_count);
}
switch (pattern_count) {
case 0:
pattern_off();
break;
case 1:
traffic_left();
break;
case 2:
traffic_center();
break;
case 3:
traffic_right();
break;
case 4:
traffic_warning();
break;
}
}
void pattern_off() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
}
void traffic_left() {
unsigned long currenttimer = millis();
if (currenttimer - lasttimer >= timer) {
lasttimer = currenttimer;
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
digitalWrite(LEDleft[light], LOW);
light = light + counter;
if (light > 7) {
light = 0;
counter = 1;
}
digitalWrite(LEDleft[light], HIGH);
}
}
void traffic_center() {
unsigned long currenttimer = millis();
if (currenttimer - lasttimer >= timer2) {
lasttimer = currenttimer;
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
digitalWrite(centerright[light], LOW);
digitalWrite(centerleft[light], LOW);
light = light + counter;
if (light > 3) {
light = 0;
counter = 1;
}
digitalWrite(centerright[light], HIGH);
digitalWrite(centerleft[light], HIGH);
}
}
void traffic_right() {
unsigned long currenttimer = millis();
if (currenttimer - lasttimer >= timer) {
lasttimer = currenttimer;
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
digitalWrite(LEDright[light], LOW);
light = light + counter;
if (light > 7) {
light = 0;
counter = 1;
}
digitalWrite(LEDright[light], HIGH);
}
}
void traffic_warning() {
switch (warning_count) {
case 1:
even_odd_flash();
break;
case 2:
half_half();
break;
case 3:
half_half_flash();
break;
case 4:
two_by_two();
break;
case 5:
two_by_two_parallel();
break;
case 6:
out_flash();
break;
case 7:
one_center();
break;
case 8:
outboard();
break;
case 9:
inboard();
break;
case 10:
even_odd();
break;
}
}
void even_odd_flash() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
digitalWrite(12, LEFT_state);
digitalWrite(11, RIGHT_state);
digitalWrite(10, LEFT_state);
digitalWrite(9, RIGHT_state);
digitalWrite(8, LEFT_state);
digitalWrite(7, RIGHT_state);
digitalWrite(6, LEFT_state);
digitalWrite(5, RIGHT_state);
if ((long)(millis() - waitUntilSwitch) >= 0) {
LEFT_state = LOW;
RIGHT_state = LOW;
whichLED = !whichLED;
waitUntilSwitch += switchDelay;
}
if ((long)(millis() - strobeWait) >= 0) {
if (whichLED == LEFTside)
LEFT_state = !LEFT_state;
if (whichLED == RIGHTside)
RIGHT_state = !RIGHT_state;
strobeWait += strobeDelay;
}
}
void half_half_flash() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
digitalWrite(12, LEFT_state);
digitalWrite(11, LEFT_state);
digitalWrite(10, LEFT_state);
digitalWrite(9, LEFT_state);
digitalWrite(8, RIGHT_state);
digitalWrite(7, RIGHT_state);
digitalWrite(6, RIGHT_state);
digitalWrite(5, RIGHT_state);
if ((long)(millis() - waitUntilSwitch) >= 0) {
LEFT_state = LOW;
RIGHT_state = LOW;
whichLED = !whichLED;
waitUntilSwitch += switchDelay2;
}
if ((long)(millis() - strobeWait) >= 0) {
if (whichLED == LEFTside)
LEFT_state = !LEFT_state;
if (whichLED == RIGHTside)
RIGHT_state = !RIGHT_state;
strobeWait += strobeDelay;
}
}
void half_half() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 250)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(10, HIGH);
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, LOW);
digitalWrite(5, LOW);
}
else if (time < 500)
{
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else sequenceStartTime = millis();
}
void out_flash() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 150)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else if (time < 300)
{
digitalWrite(12, LOW);
digitalWrite(11, HIGH);
digitalWrite(10, HIGH);
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
digitalWrite(5, LOW);
}
else sequenceStartTime = millis();
}
void two_by_two() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 150)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else if (time < 300)
{
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, HIGH);
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
digitalWrite(5, LOW);
}
else sequenceStartTime = millis();
}
void two_by_two_parallel() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 150)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
digitalWrite(5, LOW);
}
else if (time < 300)
{
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, HIGH);
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else sequenceStartTime = millis();
}
void one_center() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 500)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(10, HIGH);
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, LOW);
digitalWrite(6, LOW);
digitalWrite(5, LOW);
}
else if (time < 1000)
{
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, LOW);
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else sequenceStartTime = millis();
}
void outboard() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 200)
{
digitalWrite(12, HIGH);
digitalWrite(11, HIGH);
digitalWrite(6, LOW);
digitalWrite(5, LOW);
}
else if (time < 400)
{
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(6, HIGH);
digitalWrite(5, HIGH);
}
else sequenceStartTime = millis();
}
void inboard() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 200)
{
digitalWrite(11, HIGH);
digitalWrite(10, HIGH);
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
}
else if (time < 400)
{
digitalWrite(11, LOW);
digitalWrite(10, LOW);
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
digitalWrite(7, LOW);
digitalWrite(6, LOW);
}
else sequenceStartTime = millis();
}
void even_odd() {
for (int i = 0; i <= 7; i++) {
digitalWrite(LEDright[i], LOW);
}
long time = millis() - sequenceStartTime;
if (time < 300)
{
digitalWrite(12, HIGH);
digitalWrite(11, LOW);
digitalWrite(10, HIGH);
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
digitalWrite(5, LOW);
}
else if (time < 600)
{
digitalWrite(12, LOW);
digitalWrite(11, HIGH);
digitalWrite(10, LOW);
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
digitalWrite(5, HIGH);
}
else sequenceStartTime = millis();
}


{kind=link}
Comments
Please log in or sign up to comment.