

Hardware components | ||||||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
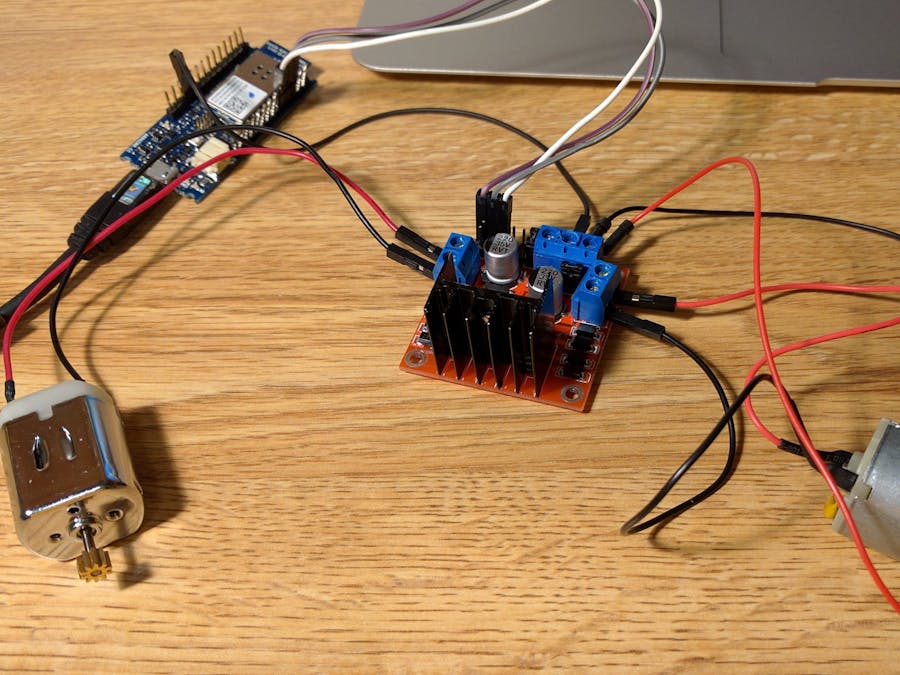
I began with the idea of remote controlling a device using Arduino MKR1000's built-in WiFi capabilities.
I then added voice commands and motor control. Any user should be able to launch a web server, and with some slight modifications, send controls over WiFi to the Arduino.
By moving a JavaScript joystick in the browser, different arguments are sent over WiFi, much like search queries over Google. These can then be read as directions for the robot.




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments