



Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
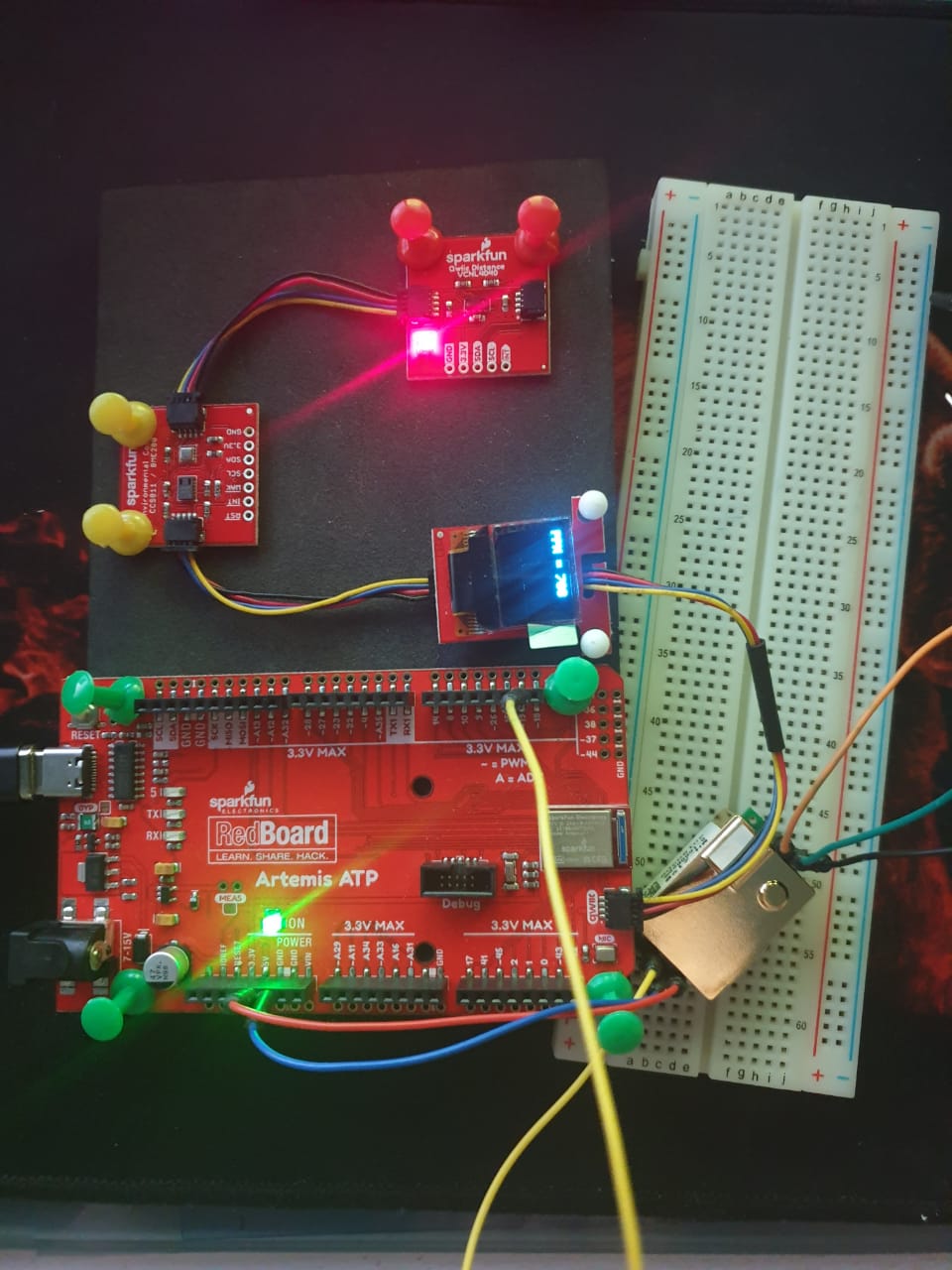
My job test stand:
It was important for me to know the CO2 values.
To know when to air the room.
The norms of carbon dioxide content in the air are considered acceptable 800 - 1 400 ppm.
However, already 1,000 ppm brings discomfort to one in two.
I learned how to get the parameters from the sensors.
Try to use a predictive model to extract more knowledge from the data.
It is very important for me to create a safe environment for my children.
P.S.
5 tips for effective CO2 measurement:
1. Choose the right CO2 measuring device: MH-Z19
2. Observe the environmental conditions:
Fine dust or condensation affects the optical beam path and therefore the measurement results.
3. Do not breathe on the device:
The air you breathe out is saturated with CO2 and must not be directed at the probe. Use a tripod and step aside a little.
4. Measure at head level:
When measuring at the workplace, the CO2 content is measured at head level of the people working there.
5. Carry out checks with increased CO2 content:
An increase in CO2 concentration may be caused by improper adjustment of the ventilation system. A quick check will never hurt.
I will continue..


{kind=link}
{kind=link}
{kind=link}
/* Copyright 2018 The TensorFlow Authors. All Rights Reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
==============================================================================*/
// Undefine predefined Arduino max/min defs so they don't conflict with std methods
#if defined(min)
#undef min
#endif
#if defined(max)
#undef max
#endif
#include <TensorFlowLite.h>
#include "main_functions.h"
#include "audio_provider.h"
#include "command_responder.h"
#include "feature_provider.h"
#include "micro_features_micro_model_settings.h"
#include "micro_features_tiny_conv_micro_features_model_data.h"
#include "recognize_commands.h"
#include "tensorflow/lite/experimental/micro/kernels/micro_ops.h"
#include "tensorflow/lite/experimental/micro/micro_error_reporter.h"
#include "tensorflow/lite/experimental/micro/micro_interpreter.h"
#include "tensorflow/lite/experimental/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
//FromCO2
#include <Wire.h> // Include Wire if you're using I2C
#include <SPI.h> // Include SPI if you're using SPI
#include <SFE_MicroOLED.h> // Include the SFE_MicroOLED library
//////////////////////////
// MicroOLED Definition //
//////////////////////////
#define PIN_RESET 9 // Connect RST to pin 9 (req. for SPI and I2C)
//#define PIN_DC 8 // Connect DC to pin 8 (required for SPI)
//#define PIN_CS 10 // Connect CS to pin 10 (required for SPI)
#define pwmPin 19
#define LedPin 13
#define DC_JUMPER 1 // Set to either 0 (default) or 1 based on jumper, matching the value of the DC Jumper
// Also connect pin 13 to SCK and pin 11 to MOSI
int prevVal = LOW;
long th, tl, h, l, ppm;
//////////////////////////////////
// MicroOLED Object Declaration //
//////////////////////////////////
// Declare a MicroOLED object. The parameters include:
// 1 - Reset pin: Any digital pin
// 2 - D/C pin: Any digital pin (SPI mode only)
// 3 - CS pin: Any digital pin (SPI mode only, 10 recommended)
//MicroOLED oled(PIN_RESET, PIN_DC, PIN_CS); //Example SPI declaration, comment out if using I2C
MicroOLED oled(PIN_RESET, DC_JUMPER); //Example I2C declaration, uncomment if using I2C
// I2C is great, but will result in a much slower update rate. The
// slower framerate may be a worthwhile tradeoff, if you need more
// pins, though.
//End FromCO2
// Globals, used for compatibility with Arduino-style sketches.
namespace {
tflite::ErrorReporter* error_reporter = nullptr;
const tflite::Model* model = nullptr;
tflite::MicroInterpreter* interpreter = nullptr;
TfLiteTensor* model_input = nullptr;
FeatureProvider* feature_provider = nullptr;
RecognizeCommands* recognizer = nullptr;
int32_t previous_time = 0;
// Create an area of memory to use for input, output, and intermediate arrays.
// The size of this will depend on the model you're using, and may need to be
// determined by experimentation.
constexpr int kTensorArenaSize = 10 * 1024;
uint8_t tensor_arena[kTensorArenaSize];
} // namespace
// The name of this function is important for Arduino compatibility.
void setup()
{
//CO2
Serial.begin(9600);
pinMode(pwmPin, INPUT);
pinMode(LedPin, OUTPUT);
delay(100);
Wire.begin();
oled.begin(); // Initialize the OLED
oled.clear(ALL); // Clear the display's internal memory
//End CO2
// Set up logging. Google style is to avoid globals or statics because of
// lifetime uncertainty, but since this has a trivial destructor it's okay.
// NOLINTNEXTLINE(runtime-global-variables)
static tflite::MicroErrorReporter micro_error_reporter;
error_reporter = µ_error_reporter;
// Map the model into a usable data structure. This doesn't involve any
// copying or parsing, it's a very lightweight operation.
model = tflite::GetModel(g_tiny_conv_micro_features_model_data);
if (model->version() != TFLITE_SCHEMA_VERSION) {
error_reporter->Report(
"Model provided is schema version %d not equal "
"to supported version %d.",
model->version(), TFLITE_SCHEMA_VERSION);
return;
}
// Pull in only the operation implementations we need.
// This relies on a complete list of all the ops needed by this graph.
// An easier approach is to just use the AllOpsResolver, but this will
// incur some penalty in code space for op implementations that are not
// needed by this graph.
//
// tflite::ops::micro::AllOpsResolver resolver;
// NOLINTNEXTLINE(runtime-global-variables)
static tflite::MicroMutableOpResolver micro_mutable_op_resolver;
micro_mutable_op_resolver.AddBuiltin(
tflite::BuiltinOperator_DEPTHWISE_CONV_2D,
tflite::ops::micro::Register_DEPTHWISE_CONV_2D());
micro_mutable_op_resolver.AddBuiltin(
tflite::BuiltinOperator_FULLY_CONNECTED,
tflite::ops::micro::Register_FULLY_CONNECTED());
micro_mutable_op_resolver.AddBuiltin(tflite::BuiltinOperator_SOFTMAX,
tflite::ops::micro::Register_SOFTMAX());
// Build an interpreter to run the model with.
static tflite::MicroInterpreter static_interpreter(
model, micro_mutable_op_resolver, tensor_arena, kTensorArenaSize,
error_reporter);
interpreter = &static_interpreter;
// Allocate memory from the tensor_arena for the model's tensors.
TfLiteStatus allocate_status = interpreter->AllocateTensors();
if (allocate_status != kTfLiteOk) {
error_reporter->Report("AllocateTensors() failed");
return;
}
// Get information about the memory area to use for the model's input.
model_input = interpreter->input(0);
if ((model_input->dims->size != 4) || (model_input->dims->data[0] != 1) ||
(model_input->dims->data[1] != kFeatureSliceCount) ||
(model_input->dims->data[2] != kFeatureSliceSize) ||
(model_input->type != kTfLiteUInt8)) {
error_reporter->Report("Bad input tensor parameters in model");
return;
}
// Prepare to access the audio spectrograms from a microphone or other source
// that will provide the inputs to the neural network.
// NOLINTNEXTLINE(runtime-global-variables)
static FeatureProvider static_feature_provider(kFeatureElementCount,
model_input->data.uint8);
feature_provider = &static_feature_provider;
static RecognizeCommands static_recognizer(error_reporter);
recognizer = &static_recognizer;
previous_time = 0;
}
// The name of this function is important for Arduino compatibility.
void loop() {
// Fetch the spectrogram for the current time.
const int32_t current_time = LatestAudioTimestamp();
int how_many_new_slices = 0;
TfLiteStatus feature_status = feature_provider->PopulateFeatureData(
error_reporter, previous_time, current_time, &how_many_new_slices);
if (feature_status != kTfLiteOk) {
error_reporter->Report("Feature generation failed");
return;
}
previous_time = current_time;
// If no new audio samples have been received since last time, don't bother
// running the network model.
if (how_many_new_slices == 0) {
return;
}
// Run the model on the spectrogram input and make sure it succeeds.
TfLiteStatus invoke_status = interpreter->Invoke();
if (invoke_status != kTfLiteOk) {
error_reporter->Report("Invoke failed");
return;
}
// Obtain a pointer to the output tensor
TfLiteTensor* output = interpreter->output(0);
// Determine whether a command was recognized based on the output of inference
const char* found_command = nullptr;
uint8_t score = 0;
bool is_new_command = false;
TfLiteStatus process_status = recognizer->ProcessLatestResults(
output, current_time, &found_command, &score, &is_new_command);
if (process_status != kTfLiteOk) {
error_reporter->Report("RecognizeCommands::ProcessLatestResults() failed");
return;
}
// Do something based on the recognized command. The default implementation
// just prints to the error console, but you should replace this with your
// own function for a real application.
RespondToCommand(error_reporter, current_time, found_command, score,is_new_command);
//CO2
long tt = millis();
int myVal = digitalRead(pwmPin);
//If you find a change
if (myVal == HIGH) //Сравнить что есть значения
{
digitalWrite(LedPin, HIGH); //Моргнуть
if (myVal != prevVal) //Сравнить что значение изменилось
{// если отлично от prevVal
h = tt;
tl = h - l;
prevVal = myVal;
}
}
else
{
digitalWrite(LedPin, LOW);
if (myVal != prevVal) //Сравнить что значение изменилось
{
l = tt;
th = l - h;
prevVal = myVal;
ppm = 10000 * (th - 2) / (th + tl - 4);
Serial.println("CO2= " + String(ppm) + " ppm");
oled.clear(PAGE);
oled.setCursor(0, 0);
oled.print("CO2= " + String(ppm));
if(ppm > 1000)
{
oled.setCursor(0, 8);
oled.print("Air room?");
oled.display();
}
}
}
//End CO2
if (is_new_command)
{
Serial.println(found_command);
if (found_command[0] == 'y')
{
oled.setCursor(0, 16);
oled.print("Yes.");
oled.display();
}
if (found_command[0] == 'n')
{oled.setCursor(0, 16);
oled.print("No.");
oled.display();
}
}
}

Comments