This is an assignment for MEGR 3092 Control of Electric Drivetrains at UNC Charlotte. For this assignment a ride on power wheel toy's control system was modified to allow for variable speed. To do so motor controllers and a hall effect pedal with position feedback was used. A demonstration is shown below.
Video Demonstration of Variable Speed Upgrade added to Power Wheel toy.
Below is a picture of one the wiring and electronic storage areas for our power wheel. It is located right under the seat right where the motors and batteries are located.
Wiring under seat of power wheel where motors are located and battery is stored
Since this area is small and hard to work in, we also located some of the wiring in the tailgate where it was more accessible to work on the breadboard.
Wiring located in tailgate
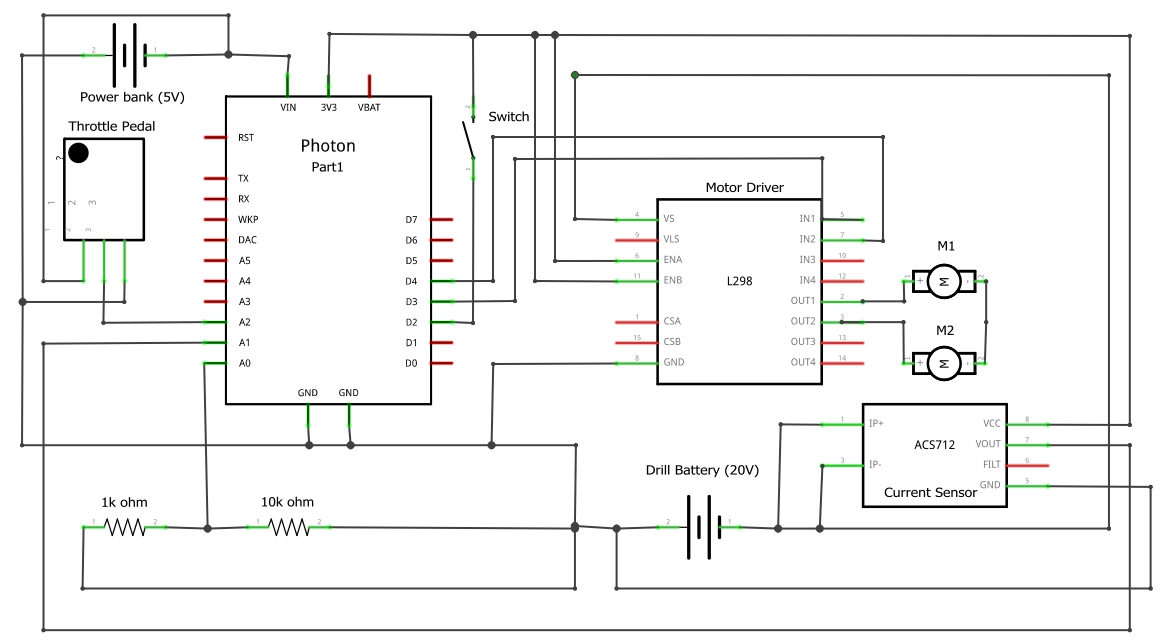
To look more in depth to wiring connections refer to schematic.
After getting the variable speed implemented slew rate traction control was another feature added to our modified Power Wheel. To change the rate to give the best traction control the "Throttle_Rate" variable was changed until the best results were yielded. A demonstration of this is shown below:
Video demonstration of the calibration of the slew rate traction control
Another component of this project is a built in EV logger as well. An Adafruit dashboard was made for these capabilities and can be located here. This dashboard displays voltage in the battery overtime, current being supplied by the battery overtime, throttle position overtime, and motor speed over time, Here is a screenshot:
Controls an EV data logger to monitor current and voltage
//Allows for code to operate if netwrok distruption occursSYSTEM_THREAD(ENABLED);// Define the pins for the analog inputsconstintVOLTAGE_PIN=A0;constintCURRENT_PIN=A1;// Defining Pin for pedal throttle controlconstintPEDAL_PIN=A2;// Initializing motor direction integer as 0intmotorDirection=0;// Setting digital pins for motor controller variable throttle and fwd/reverseconstintDIR_PIN=D2;constintPWM_R=D3;constintPWM_L=D4;constintEN_A=D5;constintEN_B=D6;// Define the ratios for the voltage divider and current sensor calibrationconstfloatVOLTAGE_RATIO=0.657;constfloatCURRENT_CALIBRATION=0.04;constfloatVOLTAGE_MULTI=11;// Multiplies voltage to give an estimate of total voltageconstfloatCurrent_Corrector=62.098;//Correct Current Readings// Define the variables to hold the raw analog readingsintrawVoltage;intrawCurrent;// Defining variables to hold analog readings for motor controlintPedalPosition;intmotorSpeed;//Defining variables for slew rate control based off throttle inputintTHROTTLE_RATE=5;intprevThrottle=0;intthrottleOutput=0;intthrottleInput=0;// Define the variables to hold the filtered valuesfloatfilteredVoltage;floatfilteredCurrent;floattotalVoltage;floattotalCurrent;// Define the time interval for reading the analog inputs (in microseconds)constunsignedlongREAD_INTERVAL=20000;// Define the time interval for outputting the filtered values (in milliseconds)constunsignedlongOUTPUT_INTERVAL=10000;// Define the filter coefficients for a first-order low-pass filter with a cutoff frequency of 5 HzconstfloatFILTER_COEFFICIENT=0.0183;// Define the timer for outputting the filtered valuesunsignedlongoutputTimer=0;voidsetup(){// Initialize the serial communicationSerial.begin(9600);// Setting pin modes for motor control connnections to the particle argonpinMode(EN_A,OUTPUT);pinMode(EN_B,OUTPUT);pinMode(PWM_R,OUTPUT);pinMode(PWM_L,OUTPUT);pinMode(DIR_PIN,INPUT_PULLDOWN);}voidloop(){// Read the analog inputsrawVoltage=analogRead(VOLTAGE_PIN);rawCurrent=analogRead(CURRENT_PIN);PedalPosition=analogRead(PEDAL_PIN);//Mapping pedal position to control motor position based on its positionmotorSpeed=map(PedalPosition,1500,3100,0,255);motorSpeed=constrain(motorSpeed,0,255);//Contrains motor speed value to only return possible motor speed values// Using direction pin to read if a voltage input is being sent into the pin to control forward/Reverse controlsmotorDirection=digitalRead(DIR_PIN);// If/else statement to control motor based on direction and pedal inputif(motorDirection==HIGH){digitalWrite(EN_A,HIGH);digitalWrite(EN_B,LOW);analogWrite(PWM_R,motorSpeed);}else{digitalWrite(EN_A,LOW);digitalWrite(EN_B,HIGH);analogWrite(PWM_L,motorSpeed);}// Slew rate traction control codethrottleInput=motorSpeed;if(throttleInput>prevThrottle){throttleOutput=min(throttleInput,prevThrottle+THROTTLE_RATE);}else{throttleOutput=max(throttleInput,prevThrottle-THROTTLE_RATE);}prevThrottle=throttleOutput;// Convert the raw values to voltages and currentfloatvoltage=rawVoltage*5.0/4095.0*VOLTAGE_RATIO;floatcurrent=(rawCurrent-2047)*5.0/4095.0/CURRENT_CALIBRATION;// Filter the valuesfilteredVoltage=FILTER_COEFFICIENT*voltage+(1-FILTER_COEFFICIENT)*filteredVoltage;filteredCurrent=FILTER_COEFFICIENT*current+(1-FILTER_COEFFICIENT)*filteredCurrent;totalVoltage=filteredVoltage*VOLTAGE_MULTI;totalCurrent=(filteredCurrent+Current_Corrector)*(-1);// Check if it's time to output the filtered valuesif(millis()-outputTimer>=OUTPUT_INTERVAL){// Output the filtered valuesSerial.print("Filtered voltage: ");Serial.print(filteredVoltage);Serial.print(" V, Filtered current: ");Serial.print(filteredCurrent);Serial.println(" A");Serial.print("totalVoltage");Serial.print("Throttle position");// Reset the output timeroutputTimer=millis();// Trigger the integrationParticle.publish("filtered voltage",String(filteredVoltage),PRIVATE);Particle.publish("filtered current",String(totalCurrent),PRIVATE);Particle.publish("total voltage",String(totalVoltage),PRIVATE);Particle.publish("PowerWheelCurrentVoltageReadings",String(totalCurrent),PRIVATE);Particle.publish("Throttle position",String(PedalPosition),PRIVATE);}// Wait until the next time to read the analog inputsunsignedlongstartTime=micros();while(micros()-startTime<READ_INTERVAL){// Do nothing}}







_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



















{kind=link}
Comments
Please log in or sign up to comment.