


As with many of my indiscretions, Amazon is to blame!
Part 1I built some robots back in high school using a HandyBoard and parts scrounged from Amercian Science and Surplus in Milwaukee. They were never very impressive but provided hours of entertainment to build and get working. I then went off to college and got busy with coursework and college stuff and more or less left the robotics stuff behind (except the programming, I do lots of programming).
Fast forward to two months ago, I was ordering some items for a home improvement project and was a few dollars short for Prime one-day shipping. On a whim I threw an Arduino in the basket and started tinkering and I was hooked, it's amazing a $8 board could kick the butt of the microcomputer I paid $250 for in high school. I picked up a few accessories from DIYMall on Amazon including a MPU6050 and a L298N motor driver and cobbled together an initial balancing robot concept using Lego EV3 motors. It was a temporary hack as ultimately I knew I wanted to make a bot out of fischertechniks but I had seen a number of projects making balancing robots with an EV3 brick and gyro so I knew the motors were capable and I had 7.4V LiPo's from my quadcopter days so everything kind of fell together. After two weeks of try-test-fail coding/building I got it to balance for an hour on carpet and decided to move on to the Fischertechnik implementation.
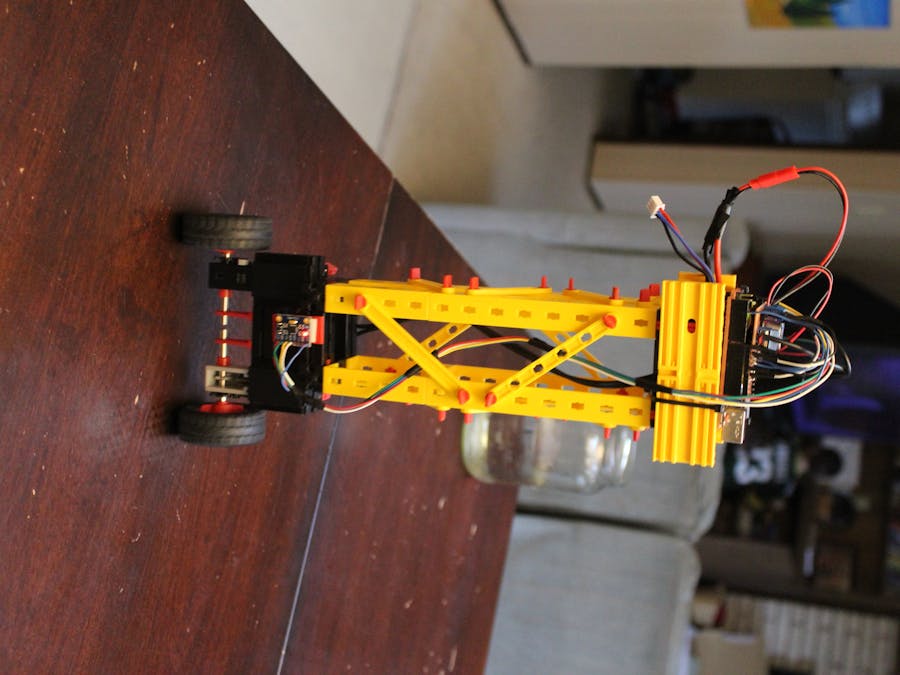
Part 2The building part went smoothly - more or less a truss tower with a solid base to mount the motors. Initially I put the battery on top with the Arduino but the motors didn't have enough torque to maintain stability. I dropped the battery to just above the motors and added some truss segments to push the Arduino higher to increase the moment of inertia and things started working. I also found out I was really overgained and started backing off the Kp and Ki (Kd = 0) until I found the minimal amount needed for stability, with an eye towards having control authority for movement.
Right now it balances for a full hour on carpet, the next step is to tweak gains for solid floors. After that, give it the ability to move about via remote control (thinking wifi with an esp8266), build the software to maneuver and give it some rudiametary sensing.



Comments
Please log in or sign up to comment.