/*
https://www.hackster.io/faweiz/arduino-radar
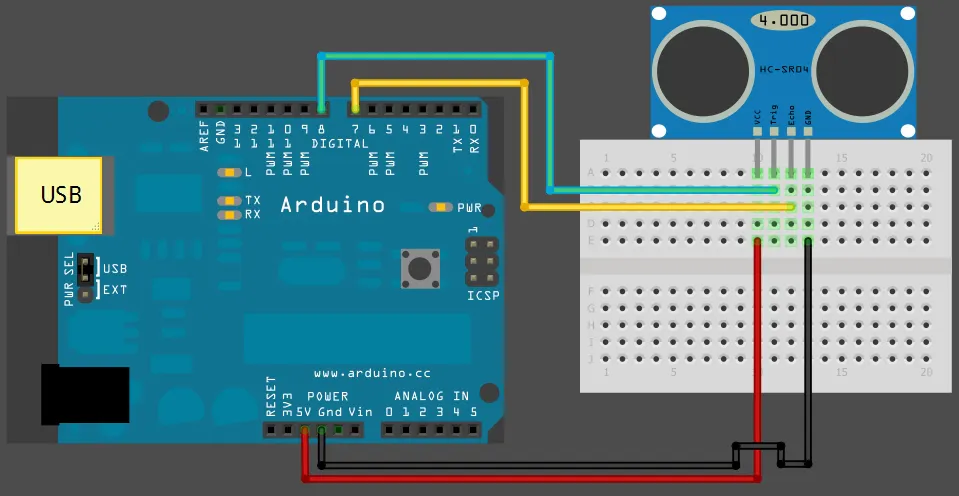
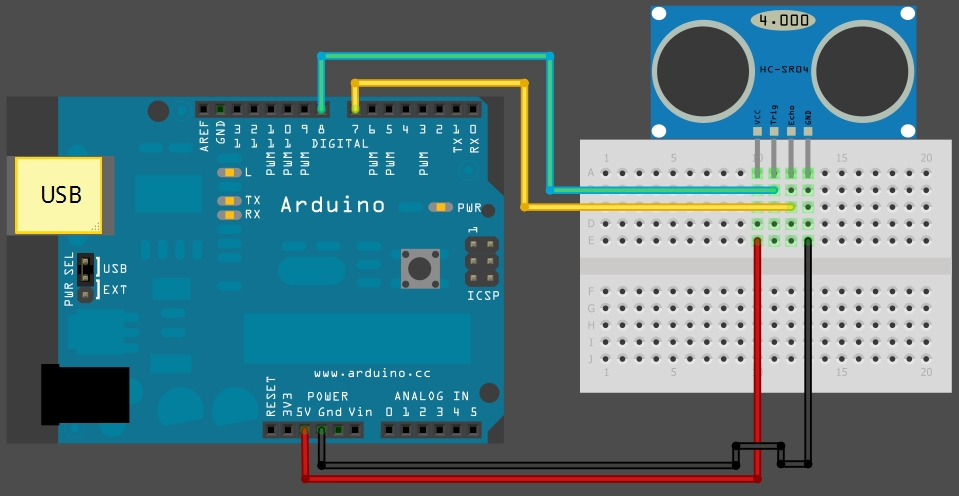
Radar Screen Visualisation for HC-SR04
Sends sensor readings for every degree moved by the servo
values sent to serial port to be picked up by Processing
*/
#include <NewPing.h>
#include <Servo.h>
#define TRIGGER_PIN 2 // Arduino pin 2 tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 3 // Arduino pin 3 tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 150 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
#define SERVO_PWM_PIN 9 //set servo to Arduino's pin 9
// means -angle .. angle
#define ANGLE_BOUNDS 80
#define ANGLE_STEP 1
int angle = 0;
// direction of servo movement
// -1 = back, 1 = forward
int dir = 1;
Servo myservo;
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600); // initialize the serial port:
myservo.attach(SERVO_PWM_PIN); //set servo to Arduino's pin 9
}
void loop() {
delay(50);
// we must renormalize to positive values, because angle is from -ANGLE_BOUNDS .. ANGLE_BOUNDS
// and servo value must be positive
myservo.write(angle + ANGLE_BOUNDS);
// read distance from sensor and send to serial
getDistanceAndSend2Serial(angle);
// calculate angle
if (angle >= ANGLE_BOUNDS || angle <= -ANGLE_BOUNDS) {
dir = -dir;
}
angle += (dir * ANGLE_STEP);
}
int getDistanceAndSend2Serial(int angle) {
int cm = sonar.ping_cm();
Serial.print(angle, DEC);
Serial.print(",");
Serial.println(cm, DEC);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments
Please log in or sign up to comment.