


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
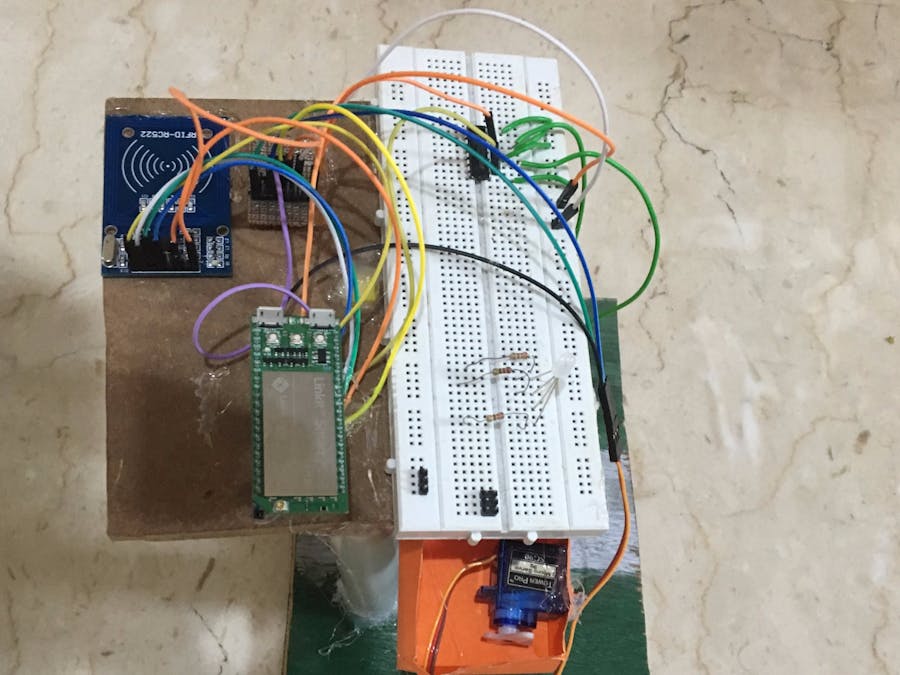
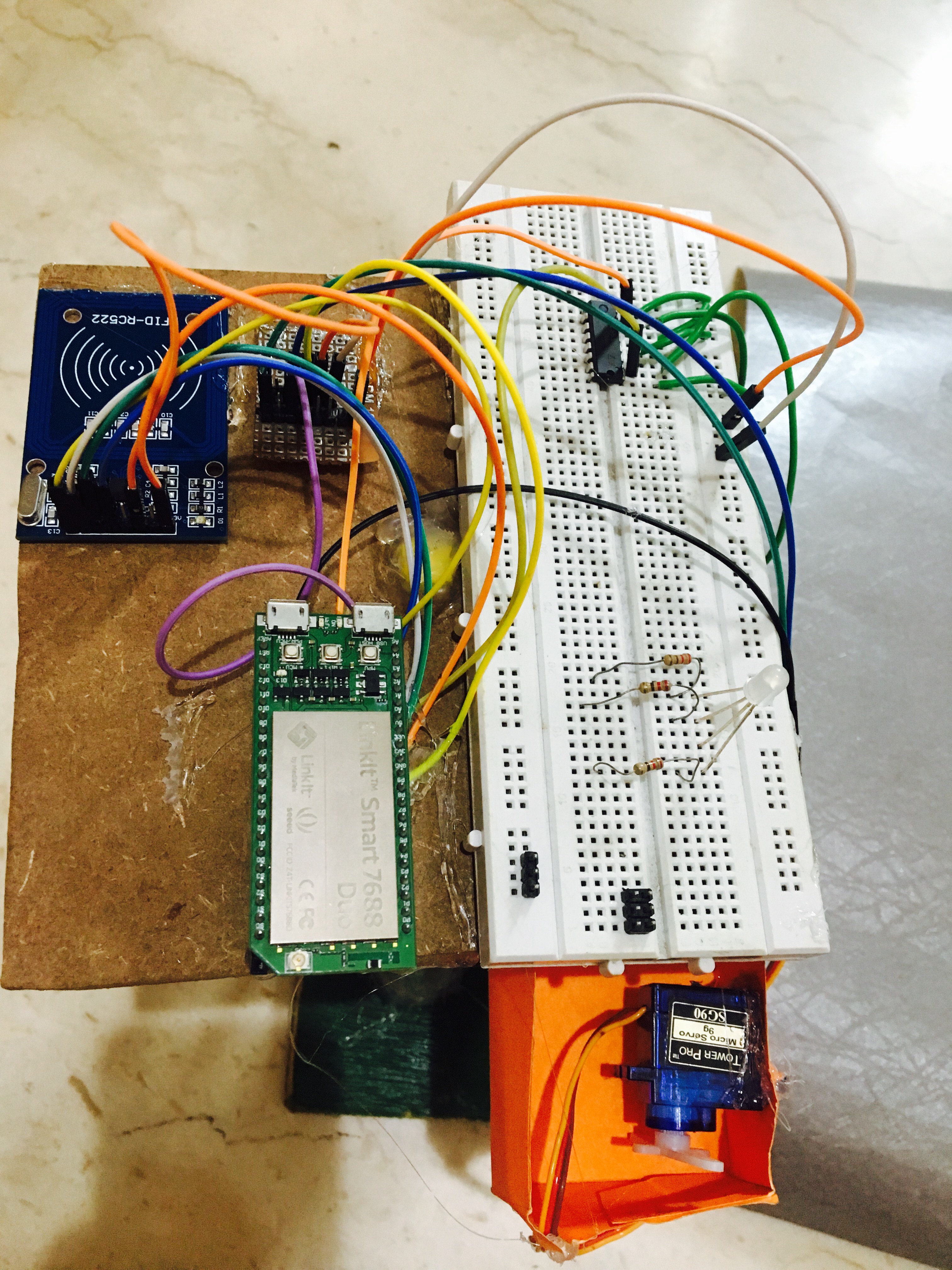
We started this as a college project and wanted our computer tables to be smarter and automated just like other products that are been developed.
We started off with linear movement of table so that the user can be able to use it both while standing and sitting.
Then we thought of using RFID tags to increase security of computer accessories placed nearby.
We also added RGB Leds to signify study lambs that have not been modified since lately.
Rgb led code can be changed and is used as comment in my program since i wasn't been able to add it on the table.
Initially we also had plans for coffee heater on computer table but their were some time constraints so we made just a small prototype model where all the features work.
We also plan to add few more feature like wireless charging over the next prototype.
We have been working on this for past few months .
In our next prototype we will control all these features using webserver and wifi on board of Linkit Mediatek 7688 Duo




{kind=link}
Comments
Please log in or sign up to comment.