


Hardware components | ||||||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
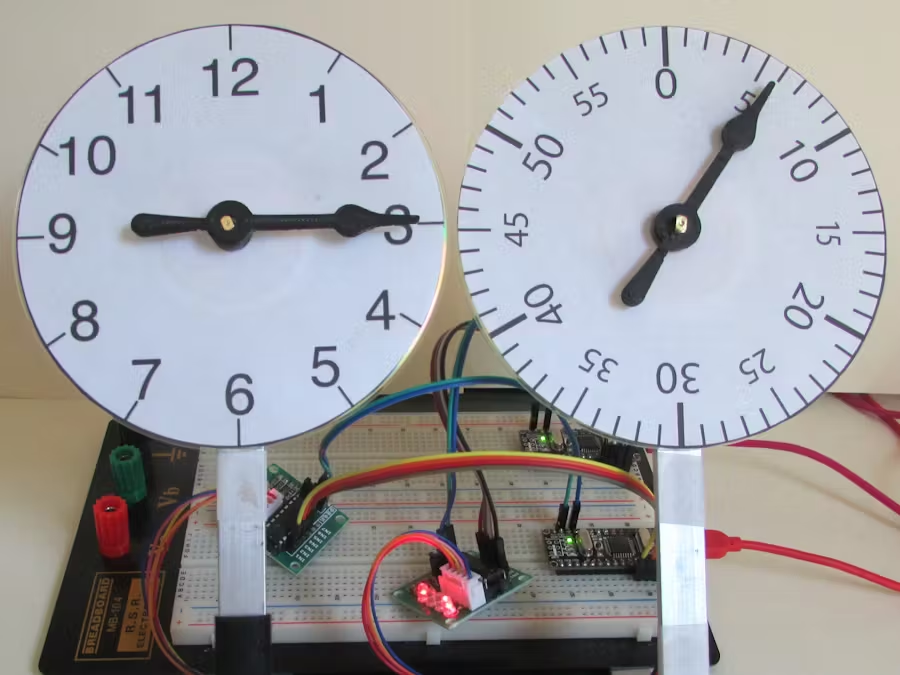
From my previous projects you can tell I am about clocks. I wanted to make a clock using a stepper motor controlled by Arduino nano to indicate the hour and another nano and stepper motor to indicate the minute. The stepper motors are from ROHS and are 28BYJ-48 5VDC available from Banggood or Wish for about $3 each. They come with control board and jumper wires ready to hook up. The hook up is really simple just follow directions in the stepper motor example (the stepper motor control example is available from get-hub or usually downloads with Arduino programming.)
The only changes necessary in the stepper motor control files is to change the delay time in the loop function. For the minute motor start with a delay of about 1800 and for the hour motor use a delay of about 21600. To adjust the timekeeping you might have to tweak the delay time a little according to the motor variability.
The dials I prepared (printed from internet) are mounted on CD's and the stepper motors are hot glued to the back of the CD's
Since the hookup is described in the stepper motor control example and all it amounts to is plug and play no schematic is included.
Hands shown are cut from thin plastic and painted black.




Comments
Please log in or sign up to comment.