


As many people reading this writeup may know, electronics kits, especially for kids, tend to use cheap parts and come with poor instructions. And I have to admit, I was thinking this kit was going to be similar to that. Yet when I opened it up, I got a big surprise.
The kit came in a nice plastic box with a latch, rather than a cardboard box. Then I saw an instruction booklet that had very detailed steps with great illustrations. The laser cut acrylic pieces were next to come out of the box. And although they were accurate and high-quality, they had a very annoying plastic film that had to be peeled off of each piece, taking me about 15 minutes. The hardware such as screws and nuts came in numbered bags making it very easy to organize. After I had laid all of my parts out, it was time to assemble.
AssemblyIt all began with the legs. I started by creating the two "feet" by putting together the three plastic pieces with a servo for each foot.
Then I attached the second set of servos to enable a yaw-type movement of each foot.
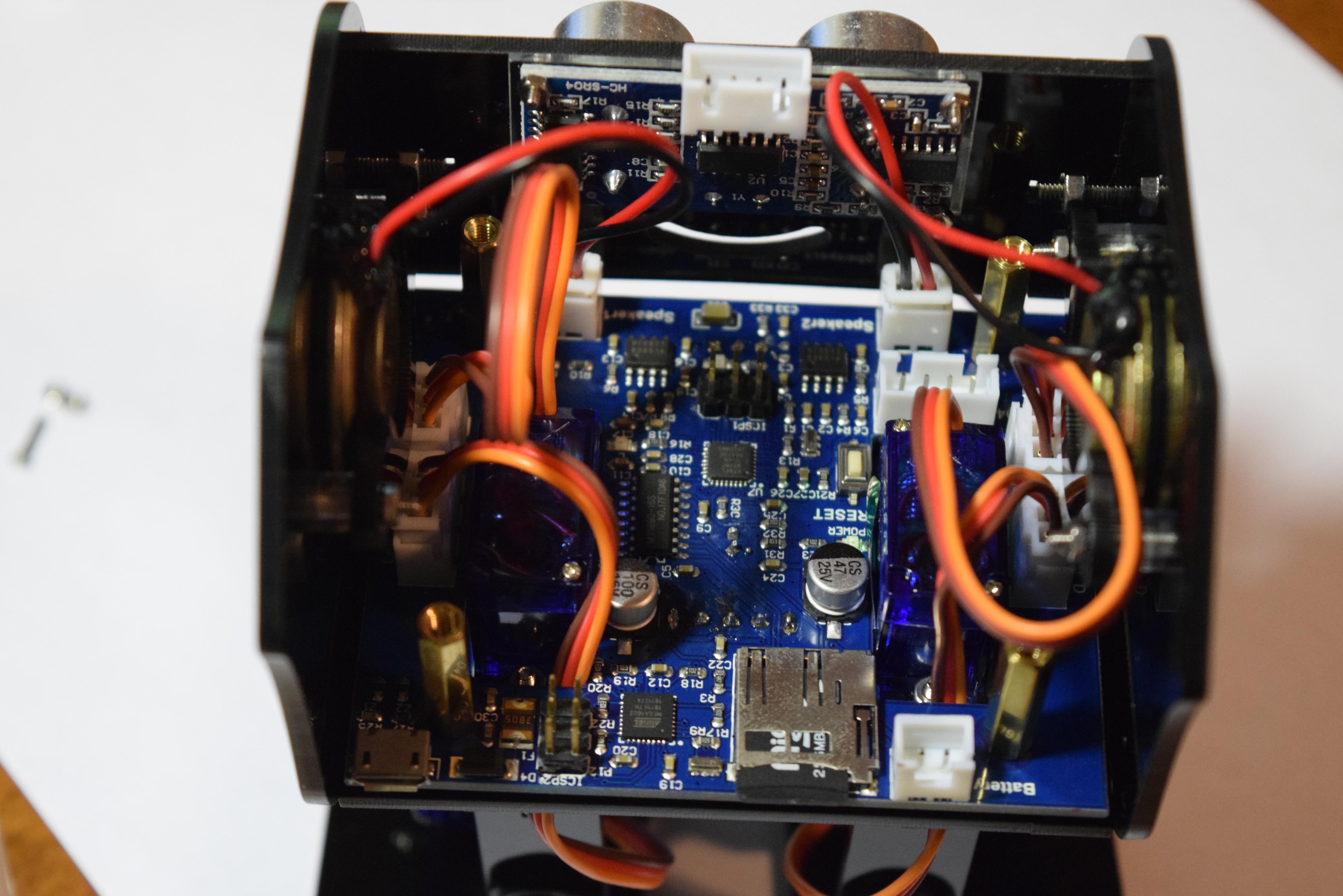
Next was the head. I took the baseplate and added the two sides, along with the two speakers for playing music. Every plug on the main board was labelled, making it very simple to connect each component.
Lastly, I added the HC-SR04 ultrasonic distance sensor and the battery pack.
The robot comes with five modes on the remote: move up, down, left, right; dance; play music; follow; and avoid.
The keypad makes the robot walk in the specified direction until the center button (standby) is pressed. The music mode plays one of the 3 pre-loaded songs off the SD card. They can be changed by pressing the up or down buttons. Additionally, the dance button makes the robot play music and move around to the song.
The last two modes are follow and avoid. In follow mode, the robot will follow your hand, moving left, right, or forward according to the IR sensors. Likewise, the avoid mode will cause the robot to go forward until it gets to and obstacle, where it then turns or backs up until it's able to go forward again.
DemonstrationI had a lot of fun building this robot kit. It comes with several great features and is a great way for people new to electronics to learn and explore the Arduino ecosystem.
#include "IRremote.h"
#include "Oscillator.h"
#include <Servo.h>
#include "NeoSWSerial.h"
#define BTN_UP 16736925
#define BTN_DOWN 16754775
#define BTN_LEFT 16761405
#define BTN_RIGHT 16720605
#define BTN_DANCE 16718055
#define BTN_MUSIC 16724175
#define BTN_MODE 16734885
#define BTN_ADD 16716015
#define BTN_SUB 16726215
#define BTN_IDLE 16712445
#define BTN_KEEP 4294967295
#define BTN_VOL 16743045
/*
---------------
| O O |
|---------------|
YR 3==> | | <== YL 2
---------------
|| ||
|| ||
RR 5==> ----- ------ <== RL 4
|----- ------|
*/
#if 1 // red
#define TRIM_YL 0
#define TRIM_YR 0
#define TRIM_RL 0
#define TRIM_RR 0
#elif 0
#define TRIM_YL 0
#define TRIM_YR 0
#define TRIM_RL 0
#define TRIM_RR 0
#endif
#define SOFTWARE_RXD A2
#define SOFTWARE_TXD A3
#define YL_PIN 10 // 3
#define YR_PIN 9 // 2
#define RL_PIN 12 // 1
#define RR_PIN 6 // 0
#define RECV_PIN 3
#define ECHO_PIN 4
#define TRIG_PIN 5
#define ST188_R_PIN A1
#define ST188_L_PIN A0
#define VOLTAGE_MEASURE_PIN A4
#define VREF 1.1
#define RES1 10000
#define RES2 2000
#define INDICATOR_LED_PIN A5
#define MY1690_PIN 8
#define HT6871_PIN 7
#define N_SERVOS 4
#define INTERVALTIME 10.0
#define CENTRE 90
#define AMPLITUDE 30
#define ULTRA_HIGH_RATE 0.3
#define HIGH_RATE 0.5
#define MID_RATE 0.7
#define LOW_RATE 1.0
#define ULTRA_LOW_RATE 1.5
NeoSWSerial mp3Serial(SOFTWARE_RXD, SOFTWARE_TXD);
unsigned long moveTime;
unsigned long ledBlinkTime;
unsigned long voltageMeasureTime;
unsigned long infraredMeasureTime;
unsigned long irValue;
boolean irValueFlag = false;
int LED_value = 255;
boolean LED_flag = true;
char danceNum = 0;
int distance;
int st188Val_L;
int st188Val_R;
long int ST188Threshold;
long int ST188RightDataMin;
long int ST188LeftDataMin;
int UltraThresholdMin = 7;
int UltraThresholdMax = 20;
Oscillator servo[N_SERVOS];
IRrecv irrecv(RECV_PIN);
decode_results results;
enum MODE {
IDLE,
IRREMOTE,
OBSTACLE,
FOLLOW,
MUSIC,
DANCE,
VOLUME
} mode = IDLE;
enum IRMODE {
FORWARD,
BACKWAED,
TURNRIGHT,
TURNLIFT,
STOP,
} IRmode = STOP;
int musicIndex = 2;
int danceIndex = 2;
bool danceFlag = false;
unsigned long preIrValue;
unsigned long preIrMillis;
unsigned long preMp3Millis;
int t = 495;
double pause = 0;
class MY1690_16S {
public:
int volume;
String playStatus[5] = {"0", "1", "2", "3", "4"}; // STOP PLAYING PAUSE FF FR
void playSong(unsigned char num, unsigned char vol) {
setVolume(vol);
setPlayMode(4);
CMD_SongSelet[4] = num;
checkCode(CMD_SongSelet);
mp3Serial.write(CMD_SongSelet, 7);
delay(10);
};
String getPlayStatus() {
mp3Serial.write(CMD_getPlayStatus, 5);
delay(10);
return getStatus();
}
String getStatus() {
String statusMp3 = "";
while (mp3Serial.available()) {
statusMp3 += (char)mp3Serial.read();
}
return statusMp3;
};
void stopPlay() {
setPlayMode(4);
mp3Serial.write(CMD_MusicStop, 5);
delay(10);
};
void setVolume(unsigned char vol) {
CMD_VolumeSet[3] = vol;
checkCode(CMD_VolumeSet);
mp3Serial.write(CMD_VolumeSet, 6);
delay(10);
};
void volumePlus() {
mp3Serial.write(CMD_VolumePlus, 5);
delay(10);
};
void volumeDown() {
mp3Serial.write(CMD_VolumeDown, 5);
delay(10);
};
void setPlayMode(unsigned char mode) {
CMD_PlayMode[3] = mode;
checkCode(CMD_PlayMode);
mp3Serial.write(CMD_PlayMode, 6);
delay(10);
};
void checkCode(unsigned char *vs) {
int val = vs[1];
int i;
for (i = 2; i < vs[1]; i++) {
val = val ^ vs[i];
}
vs[i] = val;
};
void ampMode(int p, bool m) {
pinMode(p, OUTPUT);
if (m) {
digitalWrite(p, HIGH);
} else {
digitalWrite(p, LOW);
}
};
void init() {
ampMode(HT6871_PIN, HIGH);
stopPlay();
volume = 15;
}
private:
byte CMD_MusicPlay[5] = {0x7E, 0x03, 0x11, 0x12, 0xEF};
byte CMD_MusicStop[5] = {0x7E, 0x03, 0x1E, 0x1D, 0xEF};
byte CMD_MusicNext[5] = {0x7E, 0x03, 0x13, 0x10, 0xEF};
byte CMD_MusicPrev[5] = {0x7E, 0x03, 0x14, 0x17, 0xEF};
byte CMD_VolumePlus[5] = {0x7E, 0x03, 0x15, 0x16, 0xEF};
byte CMD_VolumeDown[5] = {0x7E, 0x03, 0x16, 0x15, 0xEF};
byte CMD_VolumeSet[6] = {0x7E, 0x04, 0x31, 0x00, 0x00, 0xEF};
byte CMD_PlayMode[6] = {0x7E, 0x04, 0x33, 0x00, 0x00, 0xEF};
byte CMD_SongSelet[7] = {0x7E, 0x05, 0x41, 0x00, 0x00, 0x00, 0xEF};
byte CMD_getPlayStatus[5] = {0x7E, 0x03, 0x20, 0x23, 0xEF};
} MP3;
void oscillate(int A[N_SERVOS], int O[N_SERVOS], int T, double phase_diff[N_SERVOS]) {
for (int i = 0; i < 4; i++) {
servo[i].SetO(O[i]);
servo[i].SetA(A[i]);
servo[i].SetT(T);
servo[i].SetPh(phase_diff[i]);
}
double ref = millis();
for (double x = ref; x < T + ref; x = millis()) {
for (int i = 0; i < 4; i++) {
servo[i].refresh();
}
}
}
unsigned long final_time;
unsigned long interval_time;
int oneTime;
int iteration;
float increment[N_SERVOS];
int oldPosition[] = {CENTRE, CENTRE, CENTRE, CENTRE};
void home() {
int move1[] = {90, 90, 90, 90};
moveNServos(t, move1);
delay(t);
}
void moveNServos(int time, int newPosition[]) {
for (int i = 0; i < N_SERVOS; i++) {
increment[i] = ((newPosition[i]) - oldPosition[i]) / (time / INTERVALTIME);
}
final_time = millis() + time;
iteration = 1;
while (millis() < final_time) {
interval_time = millis() + INTERVALTIME;
oneTime = 0;
while (millis() < interval_time) {
if (oneTime < 1) {
for (int i = 0; i < N_SERVOS; i++) {
servo[i].SetPosition(oldPosition[i] + (iteration * increment[i]));
}
iteration++;
oneTime++;
}
}
}
for (int i = 0; i < N_SERVOS; i++) {
oldPosition[i] = newPosition[i];
}
}
void walk(int steps, int T, int dir) {
int A[4] = {30, 30, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(dir * 90),
DEG2RAD(dir * 90)
};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void turn(int steps, int T, int dir) {
int A[4] = {30, 30, 0, 0};
if (dir == 1) {
A[2] = 30;
A[3] = 10;
} else {
A[2] = 10;
A[3] = 30;
}
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void moonWalkRight(int steps, int T) {
int A[4] = {25, 25, 0, 0};
int O[4] = { -15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void moonWalkLeft(int steps, int T) {
int A[4] = {25, 25, 0, 0};
int O[4] = { -15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 - 120), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void crusaito(int steps, int T) {
int A[4] = {25, 25, 30, 30};
int O[4] = { -15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180 + 120), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
home();
}
void swing(int steps, int T) {
int A[4] = {25, 25, 0, 0};
int O[4] = { -15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void upDown(int steps, int T) {
int A[4] = {25, 25, 0, 0};
int O[4] = { -15, 15, 0, 0};
double phase_diff[4] = {DEG2RAD(180), DEG2RAD(0), DEG2RAD(270), DEG2RAD(270)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
home();
}
void flapping(int steps, int T) {
int A[4] = {15, 15, 8, 8};
int O[4] = { -A[0], A[1], 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(180), DEG2RAD(-90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void run(int steps, int T) {
int A[4] = {10, 10, 10, 10};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(90), DEG2RAD(90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void backyard(int steps, int T) {
int A[4] = {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(-90), DEG2RAD(-90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void backyardSlow(int steps, int T) {
int A[4] = {15, 15, 30, 30};
int O[4] = {0, 0, 0, 0};
double phase_diff[4] = {DEG2RAD(0), DEG2RAD(0), DEG2RAD(-90), DEG2RAD(-90)};
for (int i = 0; i < steps; i++)
oscillate(A, O, T, phase_diff);
}
void goingUp(int tempo) {
int move1[] = {50, 130, 90, 90};
moveNServos(tempo * HIGH_RATE, move1);
delay(tempo / 2);
home();
}
void drunk(int tempo) {
int move1[] = {70, 70, 90, 90};
int move2[] = {110, 110, 90, 90};
int move3[] = {70, 70, 90, 90};
int move4[] = {110, 110, 90, 90};
moveNServos(tempo * MID_RATE, move1);
moveNServos(tempo * MID_RATE, move2);
moveNServos(tempo * MID_RATE, move3);
moveNServos(tempo * MID_RATE, move4);
home();
}
void noGravity(int tempo) {
int move1[] = {120, 140, 90, 90};
int move2[] = {120, 30, 90, 90};
int move3[] = {120, 120, 90, 90};
int move4[] = {120, 30, 120, 120};
int move5[] = {120, 30, 60, 60};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
moveNServos(tempo * MID_RATE, move2);
moveNServos(tempo * MID_RATE, move3);
moveNServos(tempo * MID_RATE, move2);
delay(tempo);
moveNServos(tempo * LOW_RATE, move4);
delay(tempo);
moveNServos(tempo * LOW_RATE, move5);
delay(tempo);
moveNServos(tempo * LOW_RATE, move4);
delay(tempo);
home();
}
void kickLeft(int tempo) {
int move1[] = {120, 140, 90, 90};
int move2[] = {120, 90, 90, 90};
int move3[] = {120, 120, 90, 90};
int move4[] = {120, 90, 120, 120};
int move5[] = {120, 120, 60, 60};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move3);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move4);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move5);
delay(tempo / 4);
home();
}
void kickRight(int tempo) {
int move1[] = {40, 60, 90, 90};
int move2[] = {90, 60, 90, 90};
int move3[] = {60, 60, 90, 90};
int move4[] = {90, 60, 120, 120};
int move5[] = {60, 60, 60, 60};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move3);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move4);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move5);
delay(tempo / 4);
home();
}
void legRaise(int tempo, int dir) {
if (dir) {
int move1[] = {70, 70, 60, 60};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
} else {
int move1[] = {110, 110, 120, 120};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
}
home();
}
void legRaise1(int tempo, int dir) {
if (dir) {
int move1[] = {50, 60, 90, 90};
int move2[] = {60, 60, 120, 90};
int move3[] = {60, 60, 60, 90};
moveNServos(tempo * MID_RATE, move1);
delay(tempo);
moveNServos(tempo * LOW_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move3);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * LOW_RATE, move3);
delay(tempo / 4);
} else {
int move1[] = {120, 130, 90, 90};
int move2[] = {120, 120, 90, 60};
int move3[] = {120, 120, 90, 120};
moveNServos(tempo, move1);
delay(tempo);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move3);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move3);
delay(tempo / 4);
}
home();
}
void legRaise2(int steps, int tempo, int dir) {
if (dir) {
int move1[] = {20, 60, 90, 90};
int move2[] = {20, 90, 120, 90};
for (int i = 0; i < steps; i++) {
moveNServos(tempo * 0.7, move1);
delay(tempo / 4);
moveNServos(tempo * 0.7, move2);
delay(tempo / 4);
}
} else {
int move1[] = {120, 160, 90, 90};
int move2[] = {90, 160, 90, 60};
for (int i = 0; i < steps; i++) {
moveNServos(tempo * 0.7, move1);
delay(tempo / 4);
moveNServos(tempo * 0.7, move2);
delay(tempo / 4);
}
}
home();
}
void legRaise3(int steps, int tempo, int dir) {
if (dir) {
int move1[] = {20, 60, 90, 90};
int move2[] = {20, 90, 90, 90};
for (int i = 0; i < steps; i++) {
moveNServos(tempo * 0.5, move1);
delay(tempo / 4);
moveNServos(tempo * 0.5, move2);
delay(tempo / 4);
}
} else {
int move1[] = {120, 160, 90, 90};
int move2[] = {90, 160, 90, 90};
for (int i = 0; i < steps; i++) {
moveNServos(tempo * 0.5, move1);
delay(tempo / 4);
moveNServos(tempo * 0.5, move2);
delay(tempo / 4);
}
}
home();
}
void legRaise4(int tempo, int dir) {
if (dir) {
int move1[] = {20, 60, 90, 90};
int move2[] = {20, 90, 90, 90};
moveNServos(tempo * MID_RATE, move1);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
} else {
int move1[] = {120, 160, 90, 90};
int move2[] = {90, 160, 90, 90};
moveNServos(tempo * MID_RATE, move1);
delay(tempo / 4);
moveNServos(tempo * MID_RATE, move2);
delay(tempo / 4);
}
home();
}
void sitdown() {
int move1[] = {150, 90, 90, 90};
int move2[] = {150, 30, 90, 90};
moveNServos(t * ULTRA_LOW_RATE, move1);
delay(t / 2);
moveNServos(t * ULTRA_LOW_RATE, move2);
delay(t / 2);
home();
}
void lateral_fuerte(boolean dir, int tempo) {
if (dir) {
int move1[] = {CENTRE - 2 * AMPLITUDE, CENTRE - AMPLITUDE, CENTRE, CENTRE};
int move2[] = {CENTRE + AMPLITUDE, CENTRE - AMPLITUDE, CENTRE, CENTRE};
int move3[] = {CENTRE - 2 * AMPLITUDE, CENTRE - AMPLITUDE, CENTRE, CENTRE};
moveNServos(tempo * LOW_RATE, move1);
delay(tempo * 2);
moveNServos(tempo * ULTRA_HIGH_RATE, move2);
delay(tempo / 2);
moveNServos(tempo * ULTRA_HIGH_RATE, move3);
delay(tempo);
} else {
int move1[] = {CENTRE + AMPLITUDE, CENTRE + 2 * AMPLITUDE, CENTRE, CENTRE};
int move2[] = {CENTRE + AMPLITUDE, CENTRE - AMPLITUDE, CENTRE, CENTRE};
int move3[] = {CENTRE + AMPLITUDE, CENTRE + 2 * AMPLITUDE, CENTRE, CENTRE};
moveNServos(tempo * LOW_RATE, move1);
delay(tempo * 2);
moveNServos(tempo * ULTRA_HIGH_RATE, move2);
delay(tempo / 2);
moveNServos(tempo * ULTRA_HIGH_RATE, move3);
delay(tempo);
}
home();
}
void primera_parte() {
int move2[4] = {90, 90, 90, 90};
lateral_fuerte(1, t);
moveNServos(t * 0.5, move2);
lateral_fuerte(0, t);
moveNServos(t * 0.5, move2);
lateral_fuerte(1, t);
moveNServos(t * 0.5, move2);
lateral_fuerte(0, t);
home();
}
void segunda_parte() {
int move1[4] = {90, 90, 80, 100};
int move2[4] = {90, 90, 100, 80};
for (int x = 0; x < 3; x++) {
for (int i = 0; i < 3; i++) {
pause = millis();
moveNServos(t * 0.15, move1);
moveNServos(t * 0.15, move2);
while (millis() < (pause + t));
}
}
home();
}
void dance() {
primera_parte();
segunda_parte();
moonWalkLeft(4, t * 2);
moonWalkRight(4, t * 2);
moonWalkLeft(4, t * 2);
moonWalkRight(4, t * 2);
primera_parte();
for (int i = 0; i < 16; i++) {
flapping(1, t / 4);
delay(3 * t / 4);
}
moonWalkRight(4, t * 2);
moonWalkLeft(4, t * 2);
moonWalkRight(4, t * 2);
moonWalkLeft(4, t * 2);
drunk(t * 4);
drunk(t * 4);
drunk(t * 4);
drunk(t * 4);
kickLeft(t);
kickRight(t);
drunk(t * 8);
drunk(t * 4);
drunk(t / 2);
delay(t * 4);
drunk(t / 2);
delay(t * 4);
walk(2, t * 4, 1);
home();
backyard(2, t * 2);
home();
goingUp(t * 2);
goingUp(t * 1);
noGravity(t);
delay(t);
primera_parte();
for (int i = 0; i < 32; i++) {
flapping(1, t / 2);
delay(t / 2);
}
for (int i = 0; i < 4; i++)
servo[i].SetPosition(90);
}
void dance2() {
lateral_fuerte(1, t);
lateral_fuerte(0, t);
drunk(t / 2);
drunk(t);
kickLeft(t);
kickRight(t);
walk(2, t * 4, 1);
home();
backyard(2, t * 4);
noGravity(t);
lateral_fuerte(1, t);
lateral_fuerte(0, t);
segunda_parte();
upDown(5, 500);
}
void dance3() {
sitdown();
legRaise(t, 1);
swing(5, t);
legRaise1(t, 1);
walk(2, t * 4, 1);
home();
noGravity(t);
kickRight(t);
goingUp(t);
kickLeft(t);
legRaise4(t, 1);
backyard(2, t * 4);
drunk(t);
lateral_fuerte(1, 500);
lateral_fuerte(0, 500);
sitdown();
}
void dance4() {
flapping(1, t);
drunk(t);
kickLeft(t);
walk(2, t * 4, 1);
home();
lateral_fuerte(0, t);
sitdown();
legRaise(t, 1);
swing(5, t);
backyard(2, t * 4);
goingUp(t);
noGravity(t);
upDown(5, t);
legRaise1(t, 1);
legRaise2(4, t, 0);
kickRight(t);
goingUp(t);
legRaise3(4, t, 1);
kickLeft(t);
legRaise4(t, 1);
segunda_parte();
sitdown();
}
void start() {
MP3.stopPlay();
MP3.playSong(1, MP3.volume);
startDance();
MP3.stopPlay();
servoAttach();
}
void startDance() {
servoAttach();
lateral_fuerte(1, t);
lateral_fuerte(0, t);
goingUp(t);
servoDetach();
}
int getDistance() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
return (int)pulseIn(ECHO_PIN, HIGH) / 58;
}
void obstacleMode() {
// int move[] = {90, 90, 90, 90};
// int delaytime = 500;
bool turnFlag = true;
servoDetach();
distance = getDistance();
Serial.print("distance:");
Serial.print(distance);
if (distance >= 1 && distance <= 300) {
st188Val_L = analogRead(ST188_L_PIN);
st188Val_R = analogRead(ST188_R_PIN);
Serial.print("\tst188Val_L:");
Serial.print(st188Val_L);
Serial.print("\tst188Val_R:");
Serial.print(st188Val_R);
if (st188Val_L >= 1000 && st188Val_R >= 1000) {
Serial.println("\tGO BACKWAED 1");
servoAttach();
walk(3, t * 4, -1);
if (turnFlag) {
turn(3, t * 4, 1);
} else {
turn(3, t * 4, -1);
}
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L >= 1000 && st188Val_R < 1000) {
Serial.println("\tTURN RIGHT 2");
turnFlag = true;
servoAttach();
turn(3, t * 4, 1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L < 1000 && st188Val_R >= 1000) {
Serial.println("\tTURN LEFT 3");
turnFlag = false;
servoAttach();
turn(3, t * 4, -1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L < 1000 && st188Val_R < 1000) {
if (distance < 5) {
Serial.println("\tGO BACKWAED 4");
servoAttach();
walk(3, t * 4, -1);
if (turnFlag) {
turn(3, t * 4, 1);
} else {
turn(3, t * 4, -1);
}
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (distance >= 5 && distance <= 20) {
Serial.println("\tTURN RIGHT 5");
servoAttach();
if (turnFlag) {
turn(1, t * 4, 1);
} else {
turn(1, t * 4, -1);
}
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else {
Serial.println("\tGO FORWARD 6");
servoAttach();
walk(1, t * 4, 1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
}
}
} else {
Serial.println("\tSTOP 7");
servoAttach();
home();
servoDetach();
}
}
void followMode() {
int move[] = {90, 90, 90, 90};
int delaytime = 500;
servoDetach();
distance = getDistance();
Serial.print("distance:");
Serial.print(distance);
if (distance >= 1 && distance <= 300) {
st188Val_L = analogRead(ST188_L_PIN);
st188Val_R = analogRead(ST188_R_PIN);
Serial.print("\tst188Val_L:");
Serial.print(st188Val_L);
Serial.print("\tst188Val_R:");
Serial.print(st188Val_R);
if (st188Val_L >= 1000 && st188Val_R >= 1000) {
Serial.println("\tGO FORWARD 1");
servoAttach();
walk(1, t * 4, 1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L >= 1000 && st188Val_R < 1000) {
Serial.println("\tTURN LEFT 2");
servoAttach();
turn(1, t * 4, -1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L < 1000 && st188Val_R >= 1000) {
Serial.println("\tTURN RIGHT 3");
servoAttach();
turn(1, t * 4, 1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
} else if (st188Val_L < 1000 && st188Val_R < 1000) {
if (distance > 20) {
Serial.println("\tSTOP 4");
servoAttach();
home();
servoDetach();
} else {
Serial.println("\tGO FORWARD 5");
servoAttach();
walk(1, t * 4, 1);
// moveNServos(delaytime, move);
// delay(delaytime);
servoDetach();
}
}
} else {
Serial.println("\tSTOP 6");
servoAttach();
home();
servoDetach();
}
}
void st188Adjust(int dis) {
if (millis() - infraredMeasureTime > 1000 && dis > 20 && dis < 200 && analogRead(ST188_L_PIN) < 300 && analogRead(ST188_R_PIN) < 300) {
unsigned long st188RightData = 0;
unsigned long st188LeftData = 0;
for (int n = 0; n < 10; n++) {
st188LeftData += analogRead(ST188_L_PIN);
st188RightData += analogRead(ST188_R_PIN);
}
ST188LeftDataMin = st188LeftData / 10;
ST188RightDataMin = st188RightData / 10;
ST188Threshold = ST188LeftDataMin - ST188RightDataMin;
infraredMeasureTime = millis();
}
}
void voltageMeasure() {
if (millis() - voltageMeasureTime > 10000) {
int ADCValue = analogRead(VOLTAGE_MEASURE_PIN);
double volMeasure = ADCValue * VREF / 1024;
double VCC = volMeasure * (RES1 + RES2) / RES2;
// Serial.print("ADCValue = ");
// Serial.print(ADCValue);
// Serial.print("\t");
// Serial.print("volMeasure = ");
// Serial.print(volMeasure);
// Serial.print("\t");
Serial.print("VCC = ");
Serial.print(VCC);
Serial.println(" V");
//double VCC = analogRead(VOLTAGE_MEASURE_PIN) * 1.1 * 6 / 1024;
if (VCC < 4.8) {
LED_flag = false;
} else {
LED_flag = true;
}
voltageMeasureTime = millis();
}
if (LED_flag) {
analogWrite(INDICATOR_LED_PIN, 255);
} else {
if (millis() - ledBlinkTime < 500) {
analogWrite(INDICATOR_LED_PIN, 255);
} else if (millis() - ledBlinkTime >= 500 && millis() - ledBlinkTime < 1000) {
analogWrite(INDICATOR_LED_PIN, 0);
} else {
ledBlinkTime = millis();
}
}
}
boolean getIRValue() {
if (irrecv.decode(&results)) {
irValue = results.value;
Serial.println(irValue);
irrecv.resume();
return true;
}
return false;
}
void servoAttach() {
servo[0].attach(RR_PIN);
servo[1].attach(RL_PIN);
servo[2].attach(YR_PIN);
servo[3].attach(YL_PIN);
}
void servoDetach() {
servo[0].detach();
servo[1].detach();
servo[2].detach();
servo[3].detach();
}
void setup() {
Serial.begin(9600);
mp3Serial.begin(9600);
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
pinMode(INDICATOR_LED_PIN, OUTPUT);
pinMode(VOLTAGE_MEASURE_PIN, INPUT);
analogWrite(INDICATOR_LED_PIN, LED_value);
MP3.init();
irrecv.enableIRIn();
analogReference(INTERNAL);
servoAttach();
servo[0].SetTrim(TRIM_RR);
servo[1].SetTrim(TRIM_RL);
servo[2].SetTrim(TRIM_YR);
servo[3].SetTrim(TRIM_YL);
home();
servoDetach();
delay(2000);
start();
}
void loop() {
voltageMeasure();
if (getIRValue()) {
Serial.print("irValue = ");
Serial.println(irValue);
switch (irValue) {
case BTN_UP:
MP3.stopPlay();
mode = IRREMOTE;
IRmode = FORWARD;
break;
case BTN_DOWN:
MP3.stopPlay();
mode = IRREMOTE;
IRmode = BACKWAED;
break;
case BTN_LEFT:
MP3.stopPlay();
mode = IRREMOTE;
IRmode = TURNLIFT;
break;
case BTN_RIGHT:
MP3.stopPlay();
mode = IRREMOTE;
IRmode = TURNRIGHT;
break;
case BTN_MODE:
servoDetach();
Serial.println("BTN_MODE");
if (mode == FOLLOW) {
delay(10);
MP3.stopPlay();
delay(10);
MP3.playSong(7, MP3.volume);
mode = OBSTACLE;
Serial.println("OBSTACLE");
} else {
delay(10);
MP3.stopPlay();
delay(10);
MP3.playSong(6, MP3.volume);
mode = FOLLOW;
Serial.println("FOLLOW");
}
break;
case BTN_IDLE:
MP3.stopPlay();
mode = IDLE;
servoAttach();
home();
servoDetach();
break;
case BTN_MUSIC:
servoDetach();
MP3.stopPlay();
mode = MUSIC;
MP3.playSong(musicIndex, MP3.volume);
preMp3Millis = millis();
break;
case BTN_DANCE:
servoDetach();
...
This file has been truncated, please download it to see its full contents.



{kind=link}
Comments