

Hardware components | ||||||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
*This is for the Circuito.io Prank Contest*
You can find this project on https://storage.circuito.io/index.html?solutionId=58d5647186a3e00012194c37
Circuito.io is a great platform for creating and sharing Arduino projects. It gives users easy to follow instructions and helps them to make the most out of their hardware. This is a simple guide to how to create a tissue box that moves whenever a person tries to grab a tissue from it.
Here is a simple video demonstrating the prank:
Part 1:Go onto circuito.io and click the "Let's Go!" button. You'll be greeted by a very friendly interface where you just have to drag and drop in items you want. If you want to recreate this project, follow the rest of this guide.
This is what the beginning environment looks like. Feel free to explore and mess around in it. (Fig 1)
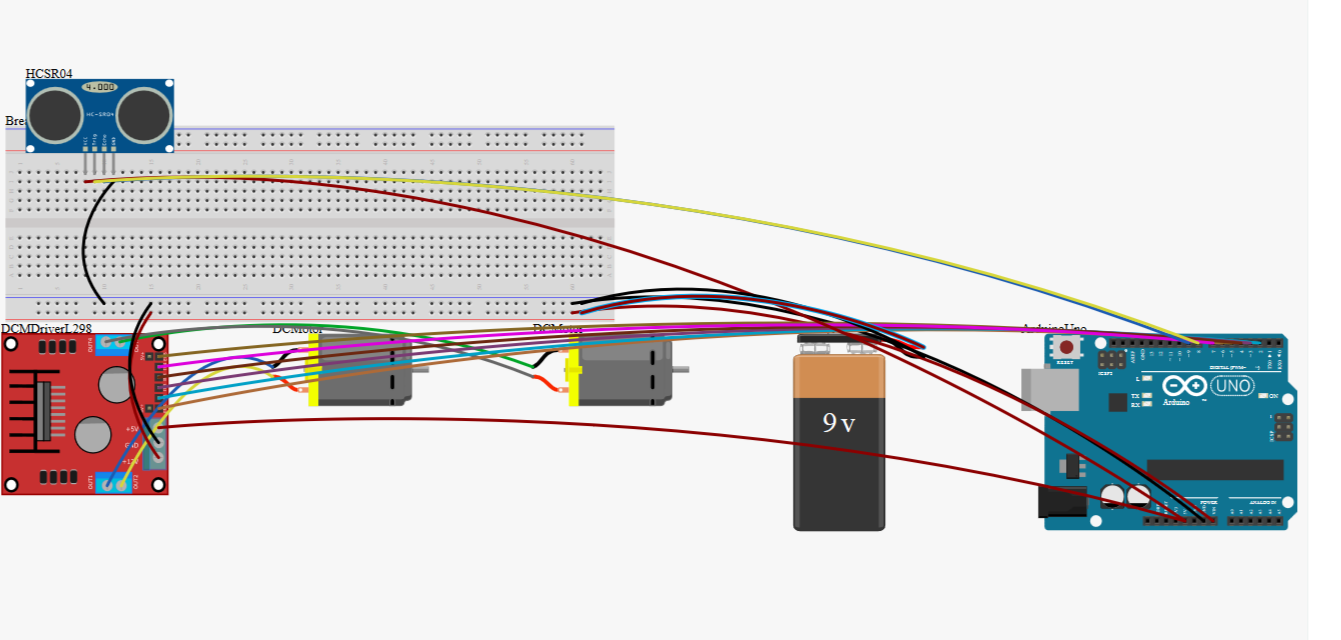
Next, find the items you want in the pane on the left. Drag the item onto the middle canvas to place it. I used a 9v battery, hc-sr04, and an l293d with two DC motors on it. (Fig 2)
Lastly, click "Generate" at the bottom to finish your new creation. You'll be taken to a new page that will look like this:
Now onto part two of this guide!
Part 2:Now that you have successfully created a project in the canvas work space, it is time to wire it up and add some code in order to breathe life into your new design. To start, gather up the materials that were specified in the BoM, which is on the second page of the guide. (Fig 3)
Next, go onto the next section, which is where you will wire it up. Follow the step-by-step instructions to accurately connect each piece of hardware together. (Fig 4)
After you have finished wiring up your project, it is time to make it come alive with code! Download the "Firmware.zip" file and place it in your sketchbook location for your Arduino IDE. Open up the file called "firmware.ino" and upload it to your board. (Fig 5)
Now it's time to test your project. Open up the serial monitor and follow the instructions on it. If it works, you have just created a successful Circuito.io project! You can share the link by copying it and sending it to others. (Fig 6)
But wait! We're not done yet. We still have to make the actual prank! Here's how to make the tissue box move:
Step 1:Grab a half empty tissue box (I used a full-sized Kleenex box for my prank bot) and cut along the bottom of it.
Step 2:Then, add a piece of cardboard that is the same size as the length and width of the box, and glue or tape it inside, pushing the tissues up.
Next, get a mini breadboard and use it instead of the one pictured in the Circuito.io instructions (to save space).
Step 4:Attach wheels to the motors such that the wheels barely come out of the box (you want it to be as discrete as possible so people won't notice).
Glue or tape the system in place inside of the tissue box and attach the battery- but don't plug it in yet!
Step 6:Pull the HC-SR04 up the side of the box and point it upwards to detect when someone is reaching for a tissue.
Step 7:Upload the code below to the Arduino Uno, and adjust the wiring according to the code, in order to make the wheels turn in the proper direction.
Here is a quick snippet of the code (Not the entire thing. Scroll to the bottom to get all of the code):
#define THRESH 4 //How many inches away their hand must be to activate it
const int FL = 2; //Pin numbers + corresponding directions
const int BL = 3;
const int FR = 4;
const int BR = 5;
const int trig_pin = 6; //HC-SR04 pins
const int echo_pin = 7;
bool dir_flag = false; //If going forwards or backwards (It alternates)
long duration = 0;
void setup() {
// put your setup code here, to run once:
pinMode(FL,OUTPUT); //Initialize pins
pinMode(BL,OUTPUT);
pinMode(FR,OUTPUT);
pinMode(BR,OUTPUT);
pinMode(trig_pin,OUTPUT);
pinMode(echo_pin,INPUT);
digitalWrite(FL,LOW);
digitalWrite(BL,LOW);
digitalWrite(FR,LOW);
digitalWrite(BR,LOW);
forwards(250); //Give a "ready" signal
delay(3000);
backwards(250);
delay(3000);
}
Enjoy the April 1st fun! Put the robotic tissue box in an area where someone is going to grasp for a quick tissue, and record their reaction when they least expect it to move!






{kind=link}
Comments
Please log in or sign up to comment.