With the whole corona virus thing going on, I decided to started training at home, while losing track of how many pushups I did during training, I got inspired to make this little contraption.
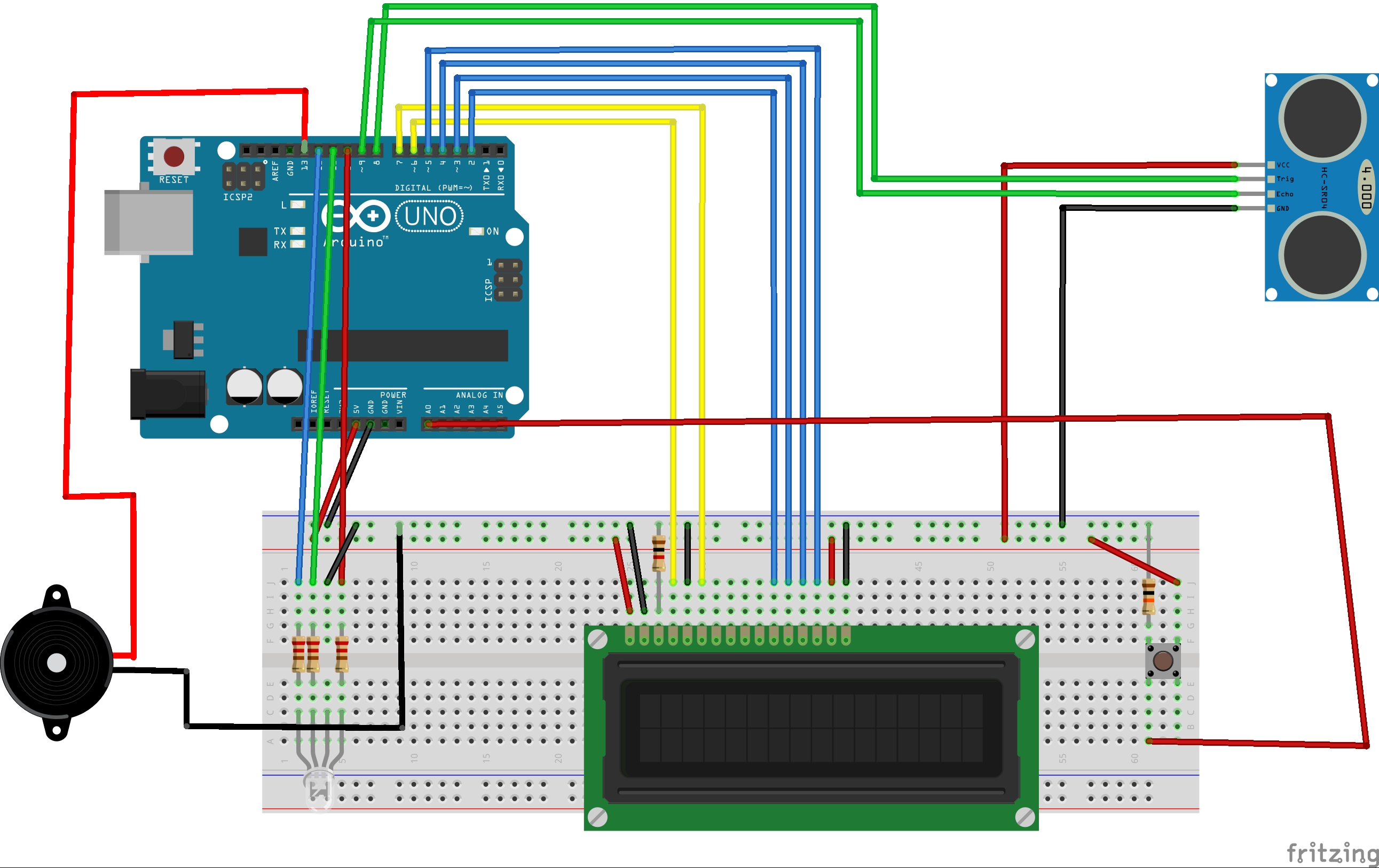
It counts every push up you do, (every second that you come into 10 centimeter of the ultrasonic sensor). It displays your pushup count on an LCD, makes a sound every ten pushups and shows how far you are from doing a push up with an RGB-led.
If the ultrasonic sensor detects something that is further away than 20 cm, the RGB is red, if it is between 10 - 20 cm, the RGB-led turns purple, if you are within 10 cm of the sensor, it turns blue and a point gets added to the counter. It doesn't matter how long you stay within a distance of 10 centimeters, only one point gets added per pushups, so you can take your time!
A small button can reset the counter.
Simply place the contraption on the ground, place the ultrasonic sensor under your forehead and start pushing!!
I'm very new to coding, so any feedback is appreciated!!



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
{kind=link}
Comments