



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
List parts/components
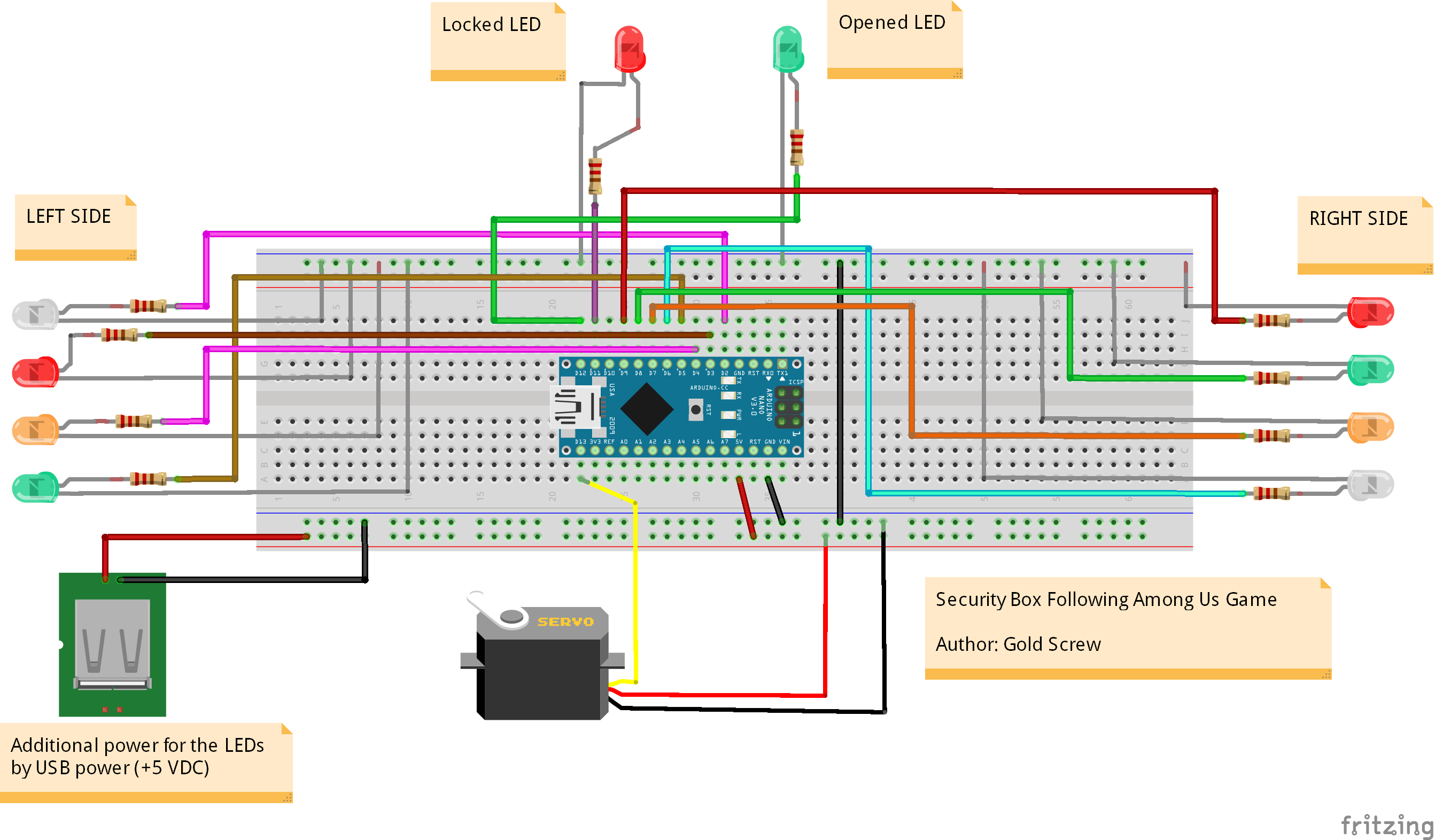
Read more- 01 Arduino Nano
https://sea.banggood.com/custlink/KKvRtHtzvp
- 01 RC Servo G9
https://sea.banggood.com/custlink/mmvYVFPU3j
- 01 Mini Breadboard 400 holes
https://sea.banggood.com/custlink/KKmyFH5qv2
- Jumper wire (male to male)
https://sea.banggood.com/custlink/mvvyHtHkdR
- Jumper wire(male to female)
https://sea.banggood.com/custlink/KmGdPFPzyJ
- Jumper wire (female to female)
https://sea.banggood.com/custlink/DmmRVFPMYZ
- Hot glue
https://sea.banggood.com/custlink/KGGdHVFzdz
- Led 5mm (White, Red, Yellow, Green)
https://sea.banggood.com/custlink/Gmmh54w6Li
- Cardboard
Find at your home
MAKING BOXCut cardboard
Connect all parts with hot glue gun
Decorate with decal
1 / 2 • Drill hole
1 / 4 • Wiring
1 / 2 • Connect Arduino to PC
1 / 2 • Open the box
Thanks and hope you enjoy!




{kind=link}
Comments
Please log in or sign up to comment.