



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
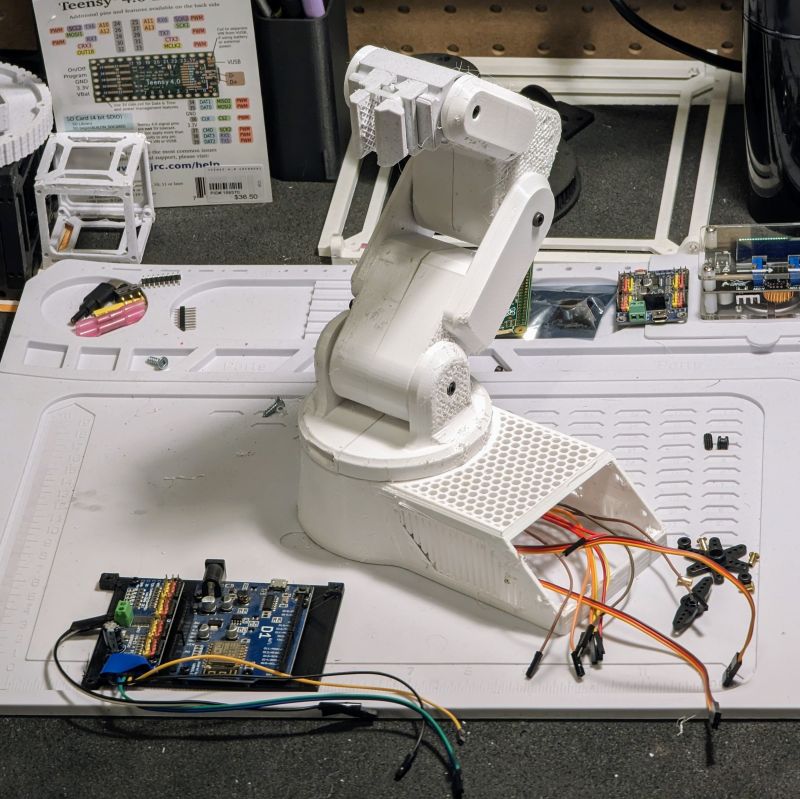
Compact Robot Arm
Read more- Base Structure: The robot arm consists of a base with several joints and segments, allowing it to articulate and move in multiple directions.
Servos:
- High Torque Servo Motor: Provides the primary movement strength for the main joints.
- Standard Servo Motors (3): Control additional joints, enabling precise movements.
- Micro Servo: Operates the gripper mechanism for picking up objects.
- Servos:
High Torque Servo Motor: Provides the primary movement strength for the main joints.
Standard Servo Motors (3): Control additional joints, enabling precise movements.
Micro Servo: Operates the gripper mechanism for picking up objects.
Gripper:
- Equipped with foam pads or a grippy substance to securely hold objects.
- Operated by a servo motor, allowing it to open and close.
- Enhanced with gears to improve mechanical advantage.
- Gripper:
Equipped with foam pads or a grippy substance to securely hold objects.
Operated by a servo motor, allowing it to open and close.
Enhanced with gears to improve mechanical advantage.
Materials:
- 3D Printed Parts: Custom-designed and printed parts form the structural elements of the arm.
- Clear Acrylic: Used for specific structural supports or as a protective covering.
- Materials:
3D Printed Parts: Custom-designed and printed parts form the structural elements of the arm.
Clear Acrylic: Used for specific structural supports or as a protective covering.
Additional Components:
- Rubber bands, screws, and washers used for assembling and securing parts.
- LED and switch integrated into the arm for status indication and control.
- Additional Components:
Rubber bands, screws, and washers used for assembling and securing parts.
LED and switch integrated into the arm for status indication and control.
- Arduino Uno: The central microcontroller used to program and control the robot arm's movements.
- Servo Driver Module: Manages and coordinates the actions of the multiple servos.
- Potentiometers (4): Allow for manual adjustments and control over the servo positions, providing fine-tuned control of the arm.
- Push Button: Additional control input for triggering specific actions or modes.
- Power Supply: A 7V power supply provides the necessary electrical power for the servos and controller.
- Wiring and Connectors: Various wires and connectors used to link all electrical components, ensuring proper communication and power distribution.
- Articulated Movement: The arm can move in multiple directions due to the strategically placed servos, allowing for complex maneuvers and positioning.
- Gripper Functionality: The end-effector or gripper can pick up and manipulate objects, making the arm useful for a variety of tasks.
- Programmable: Using the Arduino platform, the robot arm can be programmed to perform automated sequences or respond to manual controls.
- Customizable: The 3D printed parts and modular design allow for modifications and upgrades, such as adding different end-effectors or improving structural components.
This compact robot arm is a versatile and educational project, showcasing principles of robotics, electronics, and mechanical engineering.




{kind=link}
Comments
Please log in or sign up to comment.