




Hardware components | ||||||
 |
| × | 3 | |||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 3 | |||
 |
| × | 4 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
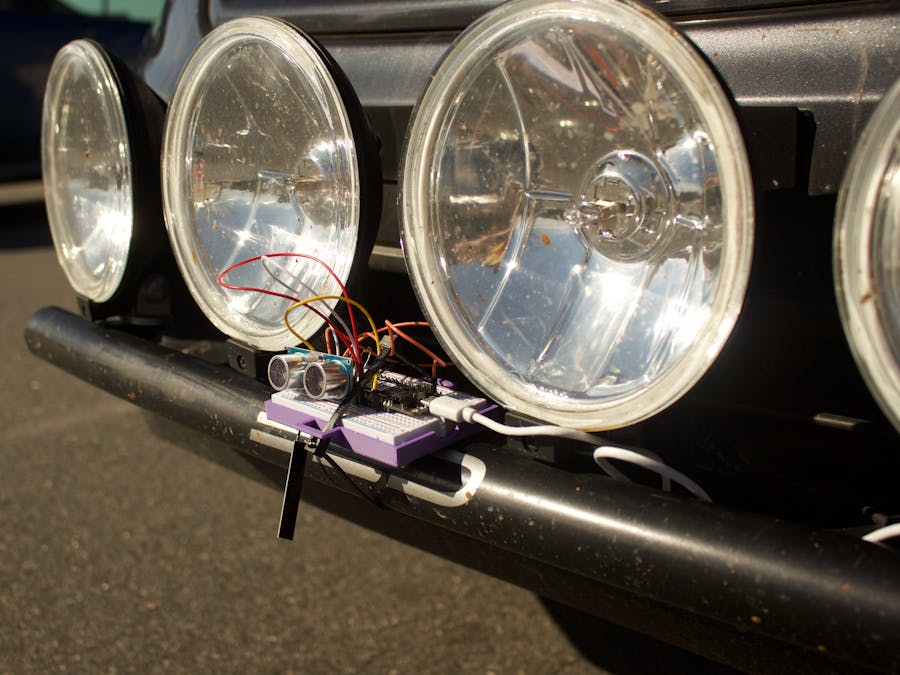
Everyone knows they have tried to park a car and wondered how much closer to the end of the spot they could be. Mirrors can throw off your depth perception and pesky hoods can block the view of your bumper. When you cannot tell how far away you are from the end of a spot, this sensor can get you to the right place.
ExecutionWhen mounted on the front and rear bumpers of a vehicle, the ultrasonic sensors will wait for something to come within their range of 40 centimeters. When this happens an argon in the cabin of the vehicle will light up an led and sound a buzzer.
RunningWorks
Both of the Argons that are connected to the HC SR04 sensors are coded to transmit and publish string data to the cloud. The Argon connected to the buzzer is subscribed to the string and is set to alert the driver when the string reads a distance below the specified point of 40 centimeters.
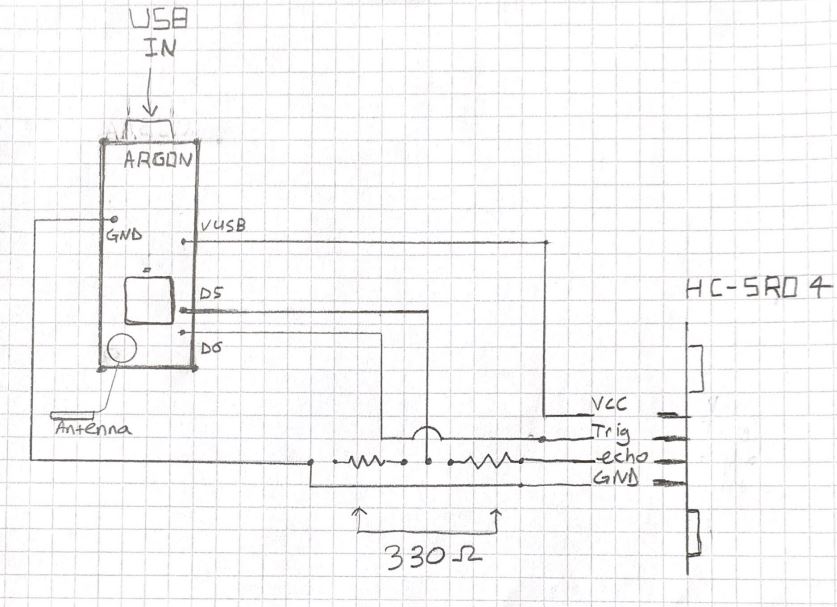
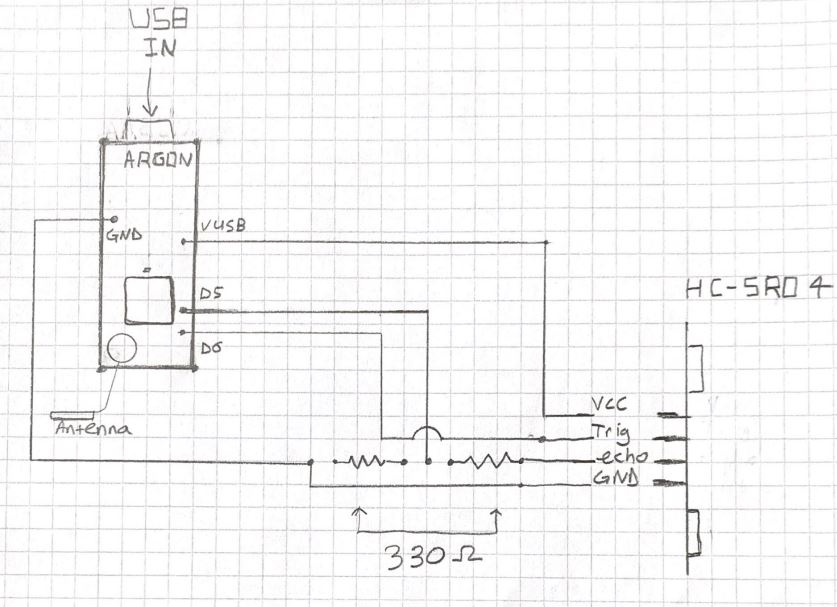
SensorCircuit
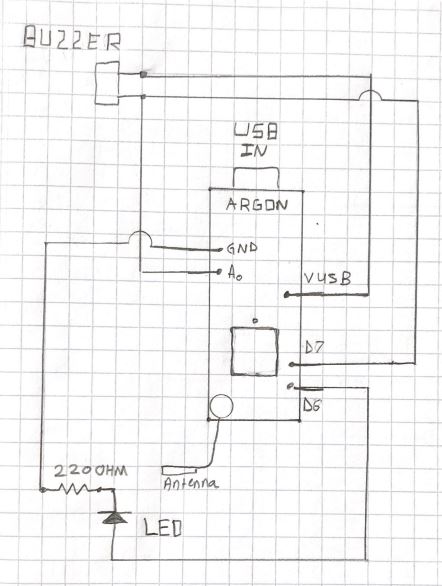
BuzzerCircuit
YouTubeVideo
In the video look and listen closely for the buzzer and led. In one interior clip, the sunlight washed out the LED. The buzzer is audible in both clips and the LED is viewable in one.
ParticleConsole Events
LiveEventDataGoogleSheetUsingIFTTT
Using IFTTT, we connected the particle argon to Google Sheets in order to show our data being collected in live time. Below is the IFTTT website that shows our commands.
Listed below is a picture of the google sheet with data points from multiple tests interrupting the ultrasonic sensor.
Below is the chart of the Google Sheet data. It shows how far away the obstruction was from the sensor when the measurement stopped. Data indicated by the number 1 and 2 comes from Terry and bob respectively. Terry is the rear sensor and bob is the front sensor. This comes from live particle event data.
Below is the link to our google sheet that is connected to the particle argon via IFTTT.
https://docs.google.com/spreadsheets/d/1nHzSCwWF-oNohBAAKW7R3ZNDfOvS4EnZUVHOib_pQdE/edit?usp=sharing
ConclusionAfter much trial and error, this project is fully functioning between each of the three argons.










{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.